牵引角检测系统的制作方法
本发明涉及检测挂车的牵引角的技术。
背景技术:
1、作为检测以能够摆动的方式与牵引车的牵引球连结的挂车(被牵引车)的绕牵引球的轴的旋转角即挂车的牵引角的技术,已知有如下技术:根据由照相机拍摄到的牵引车与挂车的连结部位的图像,识别与挂车的牵引杆的中心轴对应的直线,并检测识别出的直线相对于牵引车的左右方向上的车辆中心轴的角度作为挂车的牵引角(例如,专利文献1)。
2、另外,作为检测挂车的牵引角的技术,还已知有如下技术:利用激光测距仪测量从牵引车到挂车的左右两端部为止的牵引车的前后方向的距离,并根据左右两端部间的距离与所测量出的牵引车的前后方向的距离来计算挂车的牵引角(例如,专利文献2)。
3、另外,作为检测挂车的牵引角的技术,还已知有如下技术:根据由照相机拍摄到的、粘贴于挂车的牵引杆的上表面的标识器的图像的倾斜来检测挂车的牵引角(例如,专利文献3)。
4、另外,作为利用检测到的挂车的牵引角的技术,已知有如下技术:在牵引车后退时,根据检测到的牵引角计算牵引车与挂车的相对的位置关系,基于计算出的位置关系,求出直接使牵引车后退的情况下预想的挂车的移动轨迹,并将求出的移动轨迹重叠显示于由设置于挂车后部的照相机拍摄到的挂车后方的图像(例如,专利文献4)。
5、另外,作为利用检测到的挂车的牵引角的技术,已知有如下技术:在将由在挂车的左右侧部和后部设置的3台照相机拍摄到的图像合成而生成广泛地表示牵引车的周边的情形的全景视图图像,并对驾驶员显示所生成的全景视图图像中的一部分范围的系统中,根据检测到的牵引角来切换所显示的全景视图图像中的范围(例如,专利文献5)。
6、另外,作为利用检测出的挂车的牵引角的技术,已知有如下技术:在牵引车后退时,根据检测出的牵引角和牵引车的转向角,预测牵引车与挂车的碰撞,进行用于避免碰撞的处理(例如,专利文献6)。
7、[现有技术文献]
8、[专利文献]
9、[专利文献1]日本特开2020-1631号公报
10、[专利文献2]日本特开2021-177145号公报
11、[专利文献3]日本特开2019-199150号公报
12、[专利文献4]日本特开2016-137802号公报
13、[专利文献5]日本特表2022-547068号公报
14、[专利文献6]日本特开2016-81198号公报
技术实现思路
1、挂车的牵引杆的形状为直线状、y字状等各种形状,根据牵引杆的形状,在根据上述的连结部位的图像识别出的直线来检测牵引角的技术中有时无法正确地检测牵引角。
2、另外,在应用使用激光测距仪来检测牵引角的技术的情况下,在牵引车、挂车具备标识器、激光测距仪等特别的装备,需要分别进行校准,因此缺乏简易性。
3、另外,使用粘贴于牵引杆的上表面的标识器来检测牵引角的技术,在牵引杆、牵引杆的上表面的形状不适于标识器的粘贴的情况下无法应用。
4、因此,本发明的技术问题在于,通过更简易且具有通用性的结构来实现挂车的牵引角的检测。
5、为了实现上述技术问题,本发明在对由牵引车牵引的挂车的牵引角进行检测的牵引角检测系统中具备:照相机,以与所述挂车的牵引角无关地将所述挂车的前部包含于拍摄范围的方式设置于牵引车;左右方向计算单元,根据在由所述照相机拍摄到的图像中出现的沿所述挂车的左右延伸的所述挂车的部件的像来计算所述挂车的左右方向;以及牵引角计算单元,计算所计算出的挂车的左右方向相对于所述牵引车的左右方向的相对的角度作为挂车的牵引角。
6、在此,在该牵引角检测系统中,也可以是,将沿所述挂车的左右延伸的所述挂车的部件设为形成所述挂车的前缘的部件,所述左右方向计算单元将与所述照相机拍摄到的图像中出现的所述挂车的前缘的线近似的直线延伸的方向计算为所述挂车的左右方向。
7、另外,在以上的牵引角检测系统中,也可以是,所述照相机以与所述挂车的牵引角无关地将所述牵引车的后部和所述挂车的前部包含于拍摄范围的方式设置于牵引车,在所述左右方向计算单元中,根据所述照相机拍摄到的图像中出现的沿所述牵引车的左右延伸的所述牵引车的部件的像来计算所述牵引车的左右方向,在所述牵引角计算单元中,计算所述左右方向计算单元计算出的挂车的左右方向相对于所述左右方向计算单元计算出的牵引车的左右方向的相对的角度作为挂车的牵引角。
8、另外,在该情况下,也可以是,将沿所述牵引车的左右延伸的所述牵引车的部件作为所述牵引车的后保险杠,在所述左右方向计算单元中,将与所述照相机拍摄到的图像中出现的所述牵引车的部件的后缘的线近似的直线延伸的方向计算为所述牵引车的左右方向。
9、根据以上那样的牵引角检测系统,无论挂车的牵引杆的形状如何,都能够正确地检测挂车的牵引角。另外,能够不为牵引车、挂车设置特别的设备,而将为了后退时的后方确认用而广泛普及的后视照相机用作牵引角检测系统的照相机来检测挂车的牵引角。
10、另外,为了实现上述技术问题,本发明在对由牵引车牵引的挂车的牵引角进行检测的牵引角检测系统中具备:照相机,以与所述挂车的牵引角无关地将所述挂车的前部包含于拍摄范围的方式设置于牵引车;标识器,以表示所述挂车的左右方向的方式粘贴于所述挂车的前部的所述照相机的拍摄范围内的位置;左右方向计算单元,计算由所述照相机拍摄到的图像中出现的所述标识器的像所表示的所述挂车的左右方向;以及牵引角计算单元,计算所计算出的挂车的左右方向相对于所述牵引车的左右方向的相对的角度作为挂车的牵引角。
11、由此,仅通过在与牵引杆的上表面等相比容易确保比较良好的粘贴空间的挂车自身粘贴标识器,就能够与挂车的形状、构造无关地检测挂车的牵引角θ。
12、[发明的效果]
13、如上所述,根据本发明,能够通过更简易且具有通用性的结构来实现挂车的牵引角的检测。
技术特征:
1.一种牵引角检测系统,对由牵引车牵引的挂车的牵引角进行检测,其特征在于,具备:
2.根据权利要求1所述的牵引角检测系统,其特征在于,
3.根据权利要求1或2所述的牵引角检测系统,其特征在于,
4.根据权利要求3所述的牵引角检测系统,其特征在于,
5.一种牵引角检测系统,对由牵引车牵引的挂车的牵引角进行检测,其特征在于,具备:
技术总结
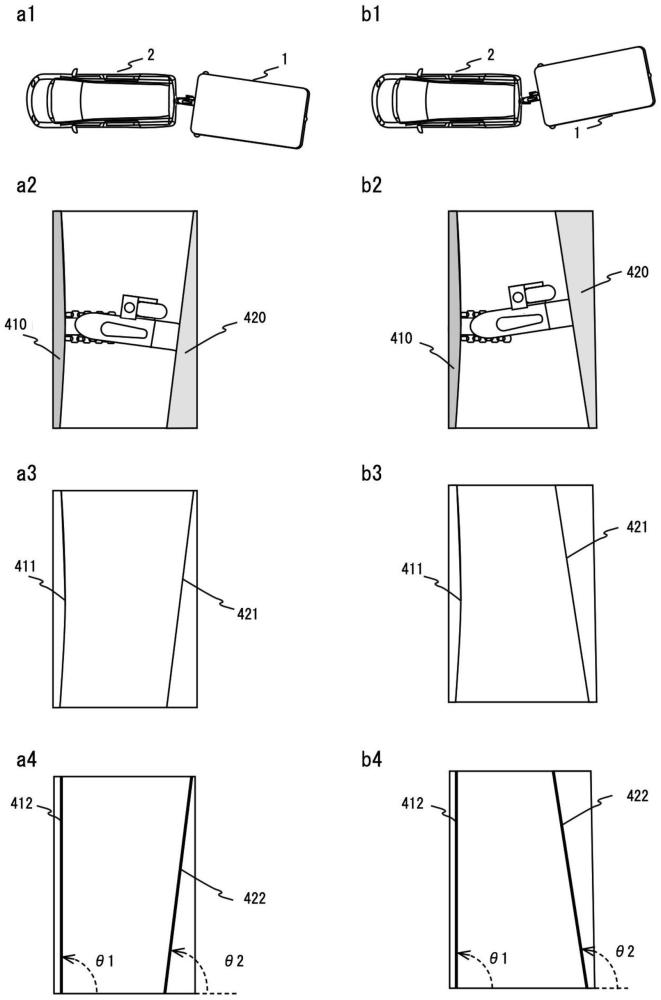
本发明提供一种通过简单且具有通用性的结构来检测挂车的牵引角的牵引角计算系统。对后方照相机(214)拍摄到的图像中的、包含牵引车(2)的后保险杠的像(410)和挂车(1)的前保险杠的像(420)在内的部分进行边缘检测,提取牵引车(2)的后保险杠的像的边缘(411)和挂车(1)的前保险杠的像的边缘(421),计算与后保险杠的像的边缘(411)最近似的直线(412)作为与牵引车(2)的左右方向平行的直线,计算与挂车(1)的前保险杠的像的边缘(421)最近似的直线(422)作为与挂车(1)的左右方向平行的直线,计算直线(422)相对于直线(412)的相对的角度作为挂车(1)的牵引角(θ)。
技术研发人员:工藤信范
受保护的技术使用者:阿尔卑斯阿尔派株式会社
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!