基于驾驶员驾驶风格的车道居中控制系统及车道居中保持方法与流程
本申请涉及车辆控制,尤其涉及一种基于驾驶员驾驶风格的车道居中控制系统及车道居中保持方法。
背景技术:
1、近年来不断涌现的辅助驾驶技术使汽车行驶更加安全便捷。辅助驾驶系统控车主要分为横向控制和纵向控制,其性能与执行器密切相关。目前常用的车道居中保持中对于方向盘转角的控制都是基于回环pid控制的。
2、在横向控车过程中,eps(电动助力转向系统)死区造成方向盘对扭矩的响应迟缓,严重影响了功能性能。由于扭矩死区的存在,造成eps对扭矩响应缓慢,当扭矩增大到一定程度时,由于此时扭矩较大,容易造成过冲现象,进而造成控制震荡。并且,由于eps反向死区的存在,方向盘回正较慢,容易造成控制超调。从而导致横向控制时,误差较大,驾乘人员的舒适感较低。
技术实现思路
1、本发明要解决的技术问题是:现有的车辆在横向控车过程中,由于eps死区的存在导致横向控制误差较大,驾乘人员的舒适感较低。
2、为此,本发明提供一种基于驾驶员驾驶风格的车道居中控制系统及车道居中保持方法。
3、本发明解决其技术问题所采用的技术方案是:
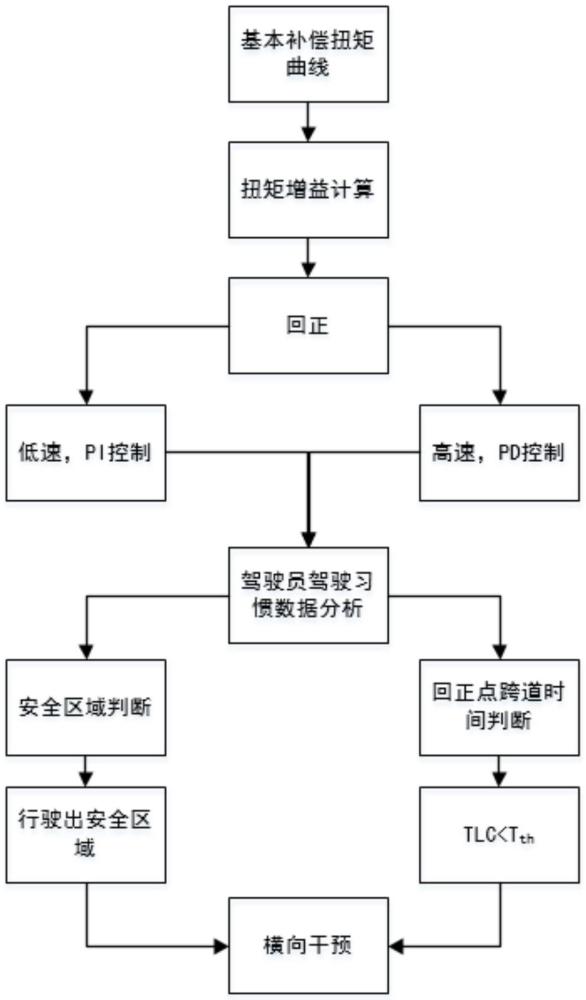
4、一种基于驾驶员驾驶风格的车道居中保持方法,包括以下步骤,
5、通过获取对应角度扭矩值,确定基本补偿扭矩曲线;
6、计算不同车速下、不同转向角度下的扭矩补偿增值;
7、分析驾驶员行驶习惯,并根据行驶习惯对应的操作参数计算车辆安全行驶区域和车辆跨道时间,根据车辆安全行驶区域和车辆跨道时间判断车辆是否需要进行横向干预,计算出航向角偏差及横向偏差,继而计算出目标转向扭矩并对车辆进行干预控制;
8、若车辆未回正,在不同车速下对车辆进行回正控制和阻尼补偿。
9、进一步地不同车速下、不同转向角度下的扭矩补偿增值为torquegain=c0*v+c1*steerangle,其中torquegain为扭矩增益,v为车速,steerangle为方向盘转角,c0,c1均为拟合系数。
10、进一步地,在分析驾驶员行驶习惯中,记录的操作参数包括自车横向偏移yc、跨道时间(tlc)、转向回正点。
11、进一步地,当车辆车道中心线与左/右车道线之间的相对距离中至少一个值达到最小距离时,则判断车辆脱离安全区域,其中,bc为车道宽度,yleft为左边界与车道中心线的最小相对距离,yright为右边界与车道中心线的最小相对距离,b为自车宽度,yel为左侧累积横向偏移量,yer右侧累积横向偏移量。
12、进一步地,驾驶员所需要的跨道时间tth=max(ts,t1+t2+t3),其中,ts为转向回正点处tlc平均值,t1为车辆以最大的横摆角速度运动到与车道线平行所需的时间,t2为驾驶员反应时间,t3为执行器响应时间。
13、进一步地,当车辆运动状态满足以下两个条件时,对横向进行干预:脱离安全区域、tlc<tth。
14、进一步地,通过目标转向角计算扭矩torque=fmap(steerangle,v)+torquegain+(sign(anglespeed)=sign(steerangle))?0:torqu edamp,其中,torque为需求扭矩;fmap(steerangle,v)为通过基本补偿曲线计算初始补偿扭矩;torquegain为补偿扭矩增益;(sign(anglespeed)=sign(steerangle))?0:torquedamp用于判断车辆是否处于回正状态,若条件成立,则增加阻尼。
15、进一步地,判断车辆是否处于回正状态,若车辆未回正,当车辆处于低速状态时,则采用pi控制回正,车辆在高速下,则采用pd控制回正。
16、进一步地,当目标值角度与当前实际角度小于阈值时,减小扭矩补偿,使用pid调节,防止过冲。
17、进一步地,扭矩补偿时考虑eps相应延时,以当前角加速度、角速度预测延时周期中方向盘旋转角度,如果预测值大于目标值,减小补偿扭矩。
18、本发明的有益效果是,本发明对车道居中保持与车辆可行驶区域的自适应补偿方法,增加了对于驾驶员驾驶习惯对可行驶区域的选择,提出了一种改变需求扭矩的计算方式,该算法计算的行驶区域更贴合驾驶员的驾驶习惯,根据驾驶员的驾驶习惯进行动态调节车辆行驶区域,并且能够在进行横向控制时减少控制误差,在提高控制精准性的同时提高了驾乘人员的舒适性。在进行横向控制时,根据自车运动状态动态调整对扭矩补偿,通过补偿的扭矩值尽快突破死区,使车辆响应及时,减少因死区造成的控制的误差。
技术特征:
1.一种基于驾驶员驾驶风格的车道居中保持方法,其特征在于,包括以下步骤,
2.根据权利要求1所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,不同车速下、不同转向角度下的扭矩补偿增值为torquegain=c0*v+c1*steerangle,其中torquegain为扭矩增益,v为车速,steerangle为方向盘转角,c0,c1均为拟合系数。
3.根据权利要求1所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,在分析驾驶员行驶习惯中,记录的操作参数包括自车横向偏移yc、跨道时间(tlc)、转向回正点。
4.根据权利要求3所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,当车辆车道中心线与左/右车道线之间的相对距离中至少一个值达到最小距离时,则判断车辆脱离安全区域,其中,bc为车道宽度,yleft为左边界与车道中心线的最小相对距离,yright为右边界与车道中心线的最小相对距离,b为自车宽度,yel为左侧累积横向偏移量,yer右侧累积横向偏移量。
5.根据权利要求4所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,驾驶员所需要的跨道时间tth=max(ts,t1+t2+t3),其中,ts为转向回正点处tlc平均值,t1为车辆以最大的横摆角速度运动到与车道线平行所需的时间,t2为驾驶员反应时间,t3为执行器响应时间。
6.根据权利要求5所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,当车辆运动状态满足以下两个条件时,对横向进行干预:脱离安全区域、tlc<tth。
7.根据权利要求6所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,通过目标转向角计算扭矩torque=fmap(steerangle,v)+torquegain+(sign(anglespeed)=sign(steerangle))?0:torqu edamp,其中,torque为需求扭矩;fmap(steerangle,v)为通过基本补偿曲线计算初始补偿扭矩;torquegain为补偿扭矩增益;(sign(anglespeed)=sign(steerangle))?0:torquedamp用于判断车辆是否处于回正状态,若条件成立,则增加阻尼。
8.根据权利要求1所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,判断车辆是否处于回正状态,若车辆未回正,当车辆处于低速状态时,则采用pi控制回正,车辆在高速下,则采用pd控制回正。
9.根据权利要求1所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,当目标值角度与当前实际角度小于阈值时,减小扭矩补偿,使用pid调节,防止过冲。
10.根据权利要求1所述的基于驾驶员驾驶风格的车道居中保持方法,其特征在于,扭矩补偿时考虑eps相应延时,以当前角加速度、角速度预测延时周期中方向盘旋转角度,如果预测值大于目标值,减小补偿扭矩。
技术总结
本申请涉及车辆控制技术领域,尤其涉及一种基于驾驶员驾驶风格的车道居中控制系统及车道居中保持方法,其方法,包括,通过获取对应角度扭矩值,确定基本补偿扭矩曲线;计算不同车速、不同转向角度下的扭矩补偿增值;分析驾驶员行驶习惯,根据对应的操作参数计算车辆安全行驶区域和车辆跨道时间,根据车辆安全行驶区域和车辆跨道时间判断车辆是否需要进行横向干预,计算出航向角偏差及横向偏差,继而计算出目标转向扭矩并对车辆进行干预控制;车辆未回正时,在不同车速下对车辆进行回正控制和阻尼补偿。本申请在进行横向控制时,根据自车运动状态动态调整对扭矩补偿,通过补偿的扭矩值尽快突破死区,使车辆响应及时,减少因死区造成的控制的误差。
技术研发人员:余治江,张民
受保护的技术使用者:上海星宇智行技术有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!