一种AGV智能机器人防护装置的制作方法
本发明属于agv智能机器人,尤其涉及一种agv智能机器人防护装置。
背景技术:
1、agv即自动导向车是采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的工业车辆。
2、目前,agv防护装置是固定安装在agv上的,并且不同的agv尺寸规格不同,因而需要使用到不同规格的防护装置,使得防护装置的通用性差。
技术实现思路
1、本发明的目的在于:为了解决上述存在的问题,而提出的一种agv智能机器人防护装置。
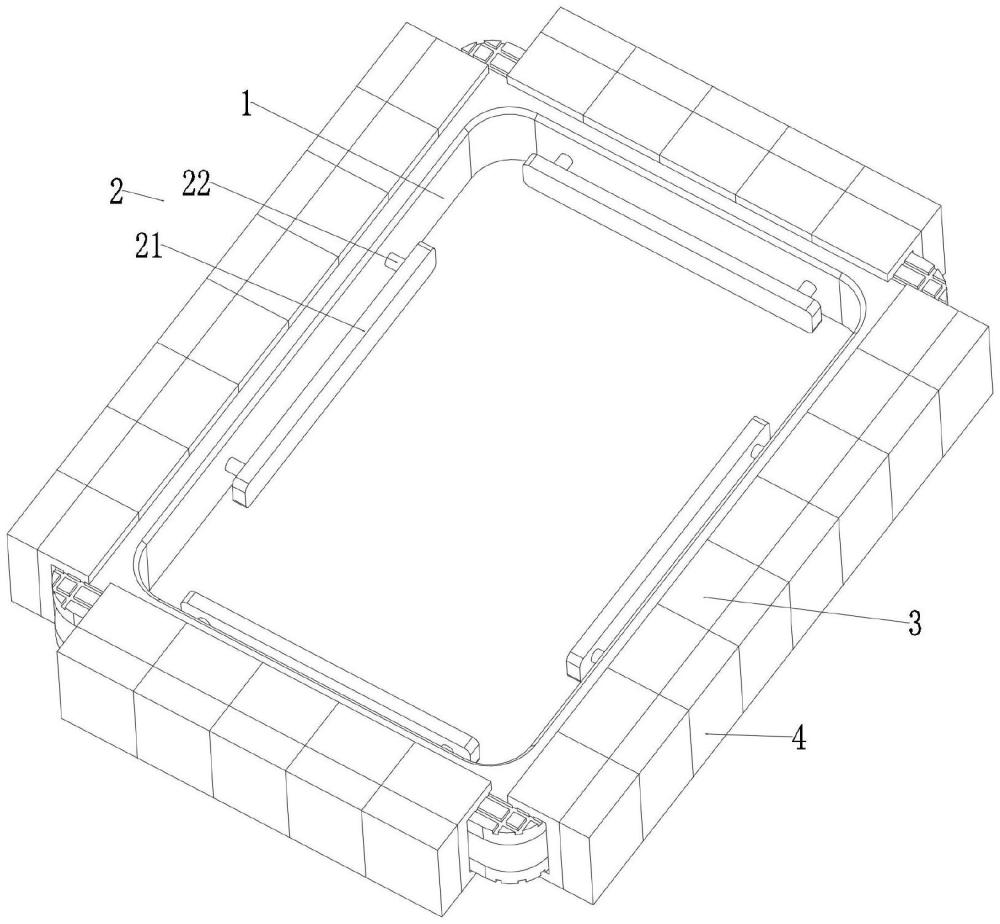
2、为了实现上述目的,本发明采用了如下技术方案:一种agv智能机器人防护装置,其包括:
3、支撑框,其为矩形框;
4、四组平压机构,其分布在所述支撑框的四边,且所述平压机构延伸至所述支撑框的内部;
5、多组防护卡件,其卡接在所述支撑框的边缘上;
6、多个支撑气囊,其分布在所述支撑框的四周,所述支撑气囊卡接在所述防护卡件上,且所述支撑气囊与所述防护卡件一一对应。
7、作为上述技术方案的进一步描述:
8、所述平压机构包括平压板和两根调节栓,所述平压板位于所述支撑框的内部,两根所述调节栓穿过并螺接所述支撑框,且两根所述调节栓的端部皆铰接所述平压板。
9、作为上述技术方案的进一步描述:
10、所述支撑框的侧面上开设有避空槽,所述调节栓位于所述避空槽内。
11、作为上述技术方案的进一步描述:
12、所述防护卡件呈c型,所述支撑框每一边的相对两个端面上皆开设有多条滑槽,所述滑槽的两端延伸至所述支撑框的相对两侧面,所述防护卡件上设置有与所述滑槽相匹配的多个滑块,所述滑块卡入所述滑槽内。
13、综上所述,由于采用了上述技术方案,本发明的有益效果是:
14、1、本发明中,通过将支撑框套在agv上,调节四组平压架构抵住agv的四周,进而将支撑框扩展固定在agv上,根据使用需求,将多个防护卡件卡在支撑框的边缘上,再将支撑气囊卡在防护卡件上,即可完成防护装置的安装,支撑气囊有利于缓解agv受到的撞击,起到了防护作用,因而可以扩展到不同规格的agv上,使用灵活方便,通用性强。
15、2、本发明中,通过转动调节栓来调节平压板在支撑框内的位置,进而可以将支撑框扩展安装在不同规格的agv上,提高了防护装置的通用性。
16、3、本发明中,通过从支撑框的外侧将滑块对准滑槽,推动防护卡件使得滑块沿着滑槽滑动,即可完成防护卡件在支撑框的扩展安装,便于防护卡件快速地扩展安装在支撑框上,并对支撑框上防护卡件的位置进行随意调节,大大地提高了装置的使用灵活性和通用性。
技术特征:
1.一种agv智能机器人防护装置,其特征在于:包括:
2.根据权利要求1所述的一种agv智能机器人防护装置,其特征在于,所述平压机构(2)包括平压板(21)和两根调节栓(22),所述平压板(21)位于所述支撑框(1)的内部,两根所述调节栓(22)穿过并螺接所述支撑框(1),且两根所述调节栓(22)的端部皆铰接所述平压板(21)。
3.根据权利要求2所述的一种agv智能机器人防护装置,其特征在于,所述支撑框(1)的侧面上开设有避空槽(5),所述调节栓(22)位于所述避空槽(5)内。
4.根据权利要求3所述的一种agv智能机器人防护装置,其特征在于,所述防护卡件(3)呈c型,所述支撑框(1)每一边的相对两个端面上皆开设有多条滑槽(6),所述滑槽(6)的两端延伸至所述支撑框(1)的相对两侧面,所述防护卡件(3)上设置有与所述滑槽(6)相匹配的多个滑块(7),所述滑块(7)卡入所述滑槽(6)内。
技术总结
本发明公开了一种AGV智能机器人防护装置,属于AGV智能机器人技术领域,包括:支撑框,其为矩形框;四组平压机构,其分布在所述支撑框的四边,且所述平压机构延伸至所述支撑框的内部;多组防护卡件,其卡接在所述支撑框的边缘上;多个支撑气囊,其分布在所述支撑框的四周,所述支撑气囊卡接在所述防护卡件上;本发明通过将支撑框套在AGV上,调节四组平压架构抵住AGV的四周,进而将支撑框扩展固定在AGV上,根据使用需求,将多个防护卡件卡在支撑框的边缘上,再将支撑气囊卡在防护卡件上,即可完成防护装置的安装,支撑气囊有利于缓解AGV受到的撞击,起到了防护作用,因而可以扩展到不同规格的AGV上,使用灵活方便,通用性强。
技术研发人员:宋仕辉
受保护的技术使用者:宋仕辉
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!