多时序行车安全场的应用方法、装置、设备及介质
本申请涉及自动驾驶,特别涉及一种多时序行车安全场的应用方法、装置、设备及介质。
背景技术:
1、随着智能网联汽车技术的不断发展,场论模型逐渐应用于自动驾驶决策规划的风险描述。
2、然而,现有行车安全场模型虽然能够有效地量化行车风险,其动能场一定程度上包含了未来时刻行车风险的信息,但其无法满足对一定时域内行车风险描述的需求,极大影响场论模型的工程化应用,亟待解决。
技术实现思路
1、本申请提供一种多时序行车安全场的应用方法、装置、设备及介质,以解决现有行车安全场模型无法满足对一定时域内行车风险描述的需求,极大影响场论模型的工程化应用等问题。
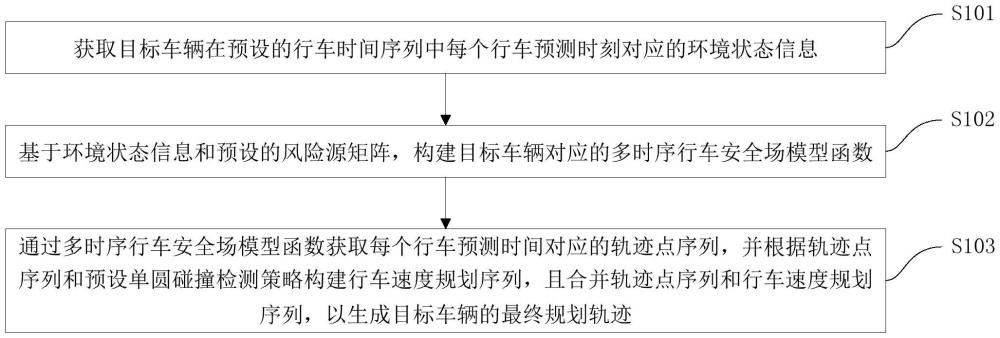
2、本申请第一方面实施例提供一种多时序行车安全场的应用方法,包括以下步骤:获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息;基于所述环境状态信息和预设的风险源矩阵,构建所述目标车辆对应的多时序行车安全场模型函数;通过所述多时序行车安全场模型函数获取所述每个行车预测时间对应的轨迹点序列,并根据所述轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,且合并所述轨迹点序列和所述行车速度规划序列,以生成所述目标车辆的最终规划轨迹。
3、可选地,在本申请的一个实施例中,所述获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息,包括:获取所述目标车辆的行车时间序列;预测所述行车时间序列中每个行车预测时刻对应的静态障碍物信息;根据所述静态障碍物信息得到所述行车时间序列对应的环境状态信息。
4、可选地,在本申请的一个实施例中,所述基于所述环境状态信息和预设的风险源矩阵,构建所述目标车辆对应的多时序行车安全场模型函数,包括:基于所述行车时间序列,建立所述风险源矩阵;根据所述环境状态信息、所述风险源矩阵和所述行车安全场模型,构建所述多时序行车安全场模型函数。
5、可选地,在本申请的一个实施例中,所述通过所述多时序行车安全场模型函数获取所述每个行车预测时间对应的轨迹点序列,并根据所述轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,包括:根据所述多时序行车安全场模型函数计算所述目标车辆的风险值矩阵;生成所述行车时间序列对应的所述目标车辆的轨迹序列,并通过所述轨迹序列确定所述行车时间序列中每个行车预测时刻对应的轨迹点序列;基于所述轨迹点序列,获取所述目标车辆在所述行车时间序列对应的速度序列;根据所述风险值矩阵对所述轨迹点序列中每个行车预测时刻对应的轨迹点进行单圆碰撞检测和速度规划操作,以生成所述行车时间序列对应的行车速度规划序列。
6、本申请第二方面实施例提供一种多时序行车安全场的应用装置,包括:确定模块,用于获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息;构建模块,用于基于所述环境状态信息和预设的风险源矩阵,构建所述目标车辆对应的多时序行车安全场模型函数;生成模块,用于通过所述多时序行车安全场模型函数获取所述每个行车预测时间对应的轨迹点序列,并根据所述轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,且合并所述轨迹点序列和所述行车速度规划序列,以生成所述目标车辆的最终规划轨迹。
7、可选地,在本申请的一个实施例中,所述确定模块包括:第一获取单元,用于获取所述目标车辆的行车时间序列;预测单元,用于预测所述行车时间序列中每个行车预测时刻对应的静态障碍物信息;第二获取单元,用于根据所述静态障碍物信息得到所述行车时间序列对应的环境状态信息。
8、可选地,在本申请的一个实施例中,所述构建模块包括:建立单元,用于基于所述行车时间序列,建立所述风险源矩阵;建模单元,用于根据所述环境状态信息、所述风险源矩阵和所述行车安全场模型,构建所述多时序行车安全场模型函数。
9、可选地,在本申请的一个实施例中,所述生成模块包括:第一计算单元,用于根据所述多时序行车安全场模型函数计算所述目标车辆的风险值矩阵;第二计算单元,用于生成所述行车时间序列对应的所述目标车辆的轨迹序列,并通过所述轨迹序列确定所述行车时间序列中每个行车预测时刻对应的轨迹点序列;第三获取单元,用于基于所述轨迹点序列,获取所述目标车辆在所述行车时间序列对应的速度序列;检测单元,用于根据所述风险值矩阵对所述轨迹点序列中每个行车预测时刻对应的轨迹点进行单圆碰撞检测和速度规划操作,以生成所述行车时间序列对应的行车速度规划序列。
10、本申请第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的多时序行车安全场的应用方法。
11、本申请第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的多时序行车安全场的应用方法。
12、由此,本申请的实施例具有以下有益效果:
13、本申请的实施例可通过获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息;基于环境状态信息和预设的风险源矩阵,构建目标车辆对应的多时序行车安全场模型函数;通过多时序行车安全场模型函数获取每个行车预测时间对应的轨迹点序列,并根据轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,且合并轨迹点序列和行车速度规划序列,以生成目标车辆的最终规划轨迹。本申请通过将预测信息应用在行车安全场模型中,能够有效地描述动态障碍物带来的行车风险,提高了风险评估模块的健壮性,增加了其应用在决策规划的可行性。由此,解决了现有行车安全场模型无法满足对一定时域内行车风险描述的需求,极大影响场论模型的工程化应用等问题。
14、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种多时序行车安全场的应用方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述环境状态信息和预设的风险源矩阵,构建所述目标车辆对应的多时序行车安全场模型函数,包括:
4.根据权利要求3所述的方法,其特征在于,所述通过所述多时序行车安全场模型函数获取所述每个行车预测时间对应的轨迹点序列,并根据所述轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,包括:
5.一种多时序行车安全场的应用装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述确定模块包括:
7.根据权利要求6所述的装置,其特征在于,所述构建模块包括:
8.根据权利要求7所述的装置,其特征在于,所述生成模块包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求1-4任一项所述的多时序行车安全场的应用方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求1-4任一项所述的多时序行车安全场的应用方法。
技术总结
本申请涉及一种多时序行车安全场的应用方法、装置、设备及介质,其中,方法包括:获取目标车辆在预设的行车时间序列中每个行车预测时刻对应的环境状态信息;基于环境状态信息和预设的风险源矩阵,构建目标车辆对应的多时序行车安全场模型函数;通过多时序行车安全场模型函数获取每个行车预测时间对应的轨迹点序列,并根据轨迹点序列和预设单圆碰撞检测策略构建行车速度规划序列,且合并轨迹点序列和行车速度规划序列,以生成目标车辆的最终规划轨迹。由此,解决了现有行车安全场模型无法满足对一定时域内行车风险描述的需求,极大影响场论模型的工程化应用等问题。
技术研发人员:王建强,蔡孟池,许庆,李克强
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!