一种行走机器人及控制方法与流程
本发明涉及智能机器人,特别涉及一种行走机器人及控制方法。
背景技术:
1、采用机器人进行工业和农业的应用,具有极大的应用前景,作为传统行走式机器人,起到承载、运输或行走的功能,用以实现多种扩张功能。
2、传统的行走机器人通常采用轮式、多足式或履带式结构,传统轮式行走机器人存在行走适应性低的情况,传统多足式行走机器人存在运行速度低下和效能低的情况,传统履带式行走机器人存在行走灵活性差效能低下的情况。
技术实现思路
1、本发明的目的在于提供一种行走机器人及控制方法,通过四轮结构,并通过独特的四轮独立结构实现提高行走机器人的灵活性、效能和承载能力。
2、为了实现上述目的,本发明的技术方案如下:
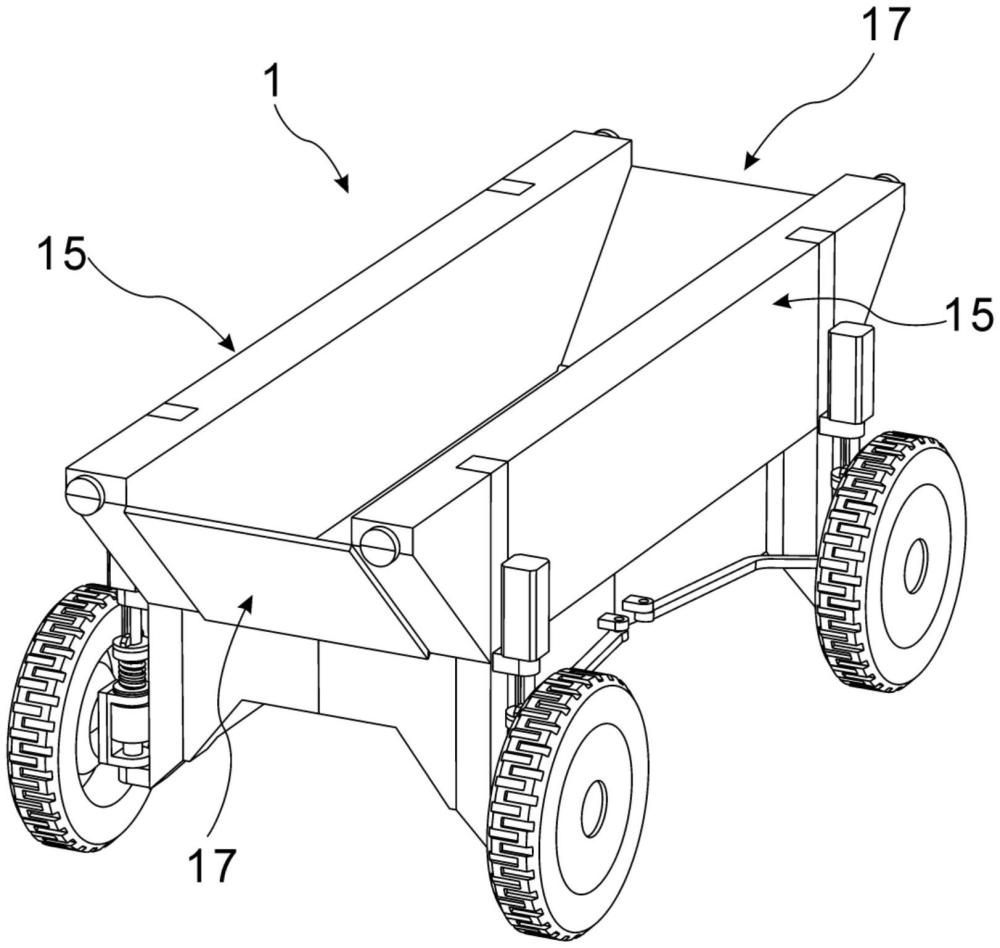
3、一种行走机器人,包括车体和布置在车体四角布置的适应轮,所述车体的截面为凹字状结构,其内部用于运输承载,所述车体上布置有传感器、通信部件、控制器和电源,在控制器的控制下,通过传感器及适应轮,实现车体的移动;
4、所述适应轮包括车轮和布置在轮体中部的驱动电机,在驱动电机的一侧布置有转向架,在车体对应的外侧布置有直杆,所述转向架通过直线轴承与直杆连接,并实现转向架及车轮以直杆为中心进行水平方向的转动,所述直杆上布置有减震弹簧,在转向架上布置有转向电机,转向电机通过拉杆与车体连接。
5、进一步的,所述转向电机与直杆为同轴布置结构。
6、进一步的,所述直杆的上部为中空结构,两侧设有直槽,所述直槽内布置有压块,压块的两侧延伸出直槽外端,所述压块的顶部连接有伺服缸,所述伺服缸的推杆容置在直杆中空结构内。
7、进一步的,所述压块与转向架之间布置有减震弹簧。
8、进一步的,所述减震弹簧顶部与压块之间布置有压盘。
9、进一步的,所述压盘与减震弹簧之间布置有阻尼块。
10、进一步的,所述拉杆为长拉杆结构,其两端分别通过球头结构进行连接。
11、进一步的,所述弹簧的底部与转向架之间设有平面轴承。
12、进一步的,所述车体的前后两端设有容置对应车轮的空间。
13、一种行走机器人的控制方法,应用于上述一种行走机器人,包括:
14、当机器人保持直线前进或后退时,通过转向电机控制左前轮、右前轮、左后轮和右后轮均处于度转动状态,并通过驱动电机将该四轮处于等速转动状态;
15、当机器人进行转弯行走时,依据路线的路径在该运行点处的转弯半径,并将运行点对齐在车辆的中心对应处,对左前轮和右前轮进行正向转动,对左后轮和右后轮进行负向转动,并使该四轮的垂线对齐与转弯圆心点,同时依据该四轮对该圆心点的距离,实施差异的转动速率进行转动状态;
16、当机器人的转弯半径小于上述状态时,依据路线的路径在该运行点处的转弯半径,将运行点对齐在左后轮和右后轮的中点处,并使左前轮和右前轮的垂线与中点对齐,并通过控制四轮与该中点的长度关系,实施差异的转速,并且其中左前轮、右前轮和右后轮正向转动,左后轮反向转动,实现极低转动角度下的的行走;
17、当机器人需要从横向移动切换为纵向移动时,通过左前轮和右后轮进行负90度转动,右前轮和左后轮正90度转动,实现四个车轮的90度转变,并通过驱动电机将该四轮处于等速转动状态;
18、当机器人需要泊车时,通过四轮构造外八的结构,并通过驱动电机锁定对应的车轮,实现车辆停泊可靠稳定。
19、采用本方案,对比现有技术,具有以下好处:
20、本方案一种行走机器人,通过在车体的四角布置适应轮,该适应轮采用独立的驱动结构、悬挂结构和转向结构,故通过控制能够对对应的适应轮进行转动速度、行程高度、水平偏转角度的完全独立的调节,从而可以实现多种环境和各种工作场景及行驶路线要求进行精准高效的行走操作;
21、本方案一种行走机器人,其适应轮采用独立轮式结构,相比较对应的如麦克纳姆轮式结构、多足运动结构或履带结构,具有结构简单、行走效能高、工作稳定和适应性好的特点,并且在同等情况下,能够减少能源消耗,故可以大大提高其巡航行走的距离;
22、本方案的适应轮,通过轮毂电机结构进行驱动,并且通过伺服缸结构来实现主动高度自适应调节功能,其结构简洁,布局合理,减震效果好,调节适应效能高,具有极好的推广意义。
技术特征:
1.一种行走机器人,其特征在于:包括车体和布置在车体四角布置的适应轮,所述车体的截面为凹字状结构,其内部用于运输承载,所述车体上布置有传感器、通信部件、控制器和电源,在控制器的控制下,通过传感器及适应轮,实现车体的移动;
2.根据权利要求1所述的一种行走机器人,其特征在于:所述转向电机与直杆为同轴布置结构。
3.根据权利要求1所述的一种行走机器人,其特征在于:所述直杆的上部为中空结构,两侧设有直槽,所述直槽内布置有压块,压块的两侧延伸出直槽外端,所述压块的顶部连接有伺服缸,所述伺服缸的推杆容置在直杆中空结构内。
4.根据权利要求3所述的一种行走机器人,其特征在于:减震弹簧布置在所述压块与转向架之间。
5.根据权利要求4所述的一种行走机器人,其特征在于:所述减震弹簧顶部与压块之间布置有压盘。
6.根据权利要求5所述的一种行走机器人,其特征在于:所述压盘与减震弹簧之间布置有阻尼块。
7.根据权利要求1所述的一种行走机器人,其特征在于:所述拉杆为长拉杆结构,其两端分别通过球头结构进行连接。
8.根据权利要求4所述的一种行走机器人,其特征在于:所述减震弹簧的底部与转向架之间设有平面轴承。
9.根据权利要求4所述的一种行走机器人,其特征在于:所述车体的前后两端设有容置对应车轮的空间。
10.一种行走机器人的控制方法,应用于上述一种行走机器人,其特征在于:包括:
技术总结
本发明公开了一种行走机器人及控制方法,属于智能机器人技术领域,其通过四轮结构,并通过独特的四轮独立结构实现提高行走机器人的灵活性、效能和承载能力。一种行走机器人,包括车体和布置在车体四角布置的适应轮,所述车体的截面为凹字状结构,其内部用于运输承载,所述车体上布置有传感器、通信部件、控制器和电源,在控制器的控制下,通过传感器及适应轮,实现车体的移动。
技术研发人员:杜浙明,徐俊义,张光新
受保护的技术使用者:严格机器人(杭州湾)国际创新研究院
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!