车辆触发变道的检验方法、装置、设备及存储介质与流程
本申请涉及计算机视觉,尤其涉及车辆触发变道的检验方法、装置、设备及存储介质。
背景技术:
1、tlc(triggered lane change)触发变道功能是一种基于摄像头视觉识别、车载侧雷达探测技术实现汽车拔杆自主变道的技术手段,一个合格的tlc动作需同时满足三个条件,分别是1)在允许变道的路段;2)相邻的目标车道变道空间符合技术要求;3)自车变道过程中与后向车辆无碰撞风险。而上述三个条件均需要公共道路上的真实数据,由于目前无法实时获取公共道路其他社会上车辆的车速、横纵向距离等关联tlc判断条件的真值参数,采用人工主观评价的方法或基于惯性系统做多车场景的模拟性能测试,该类试验方式场景单一,试验效率低下,准确度较低,无法满足在真实场景下的触发变道。
2、上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本申请的主要目的在于提供一种车辆触发变道的检验方法、装置、设备及存储介质,旨在解决现有技术中在进行道路测试时,试验效率低下,准确度较低的技术问题。
2、为实现上述目的,本申请提出一种车辆触发变道的检验方法,所述车辆触发变道的检验方法包括:
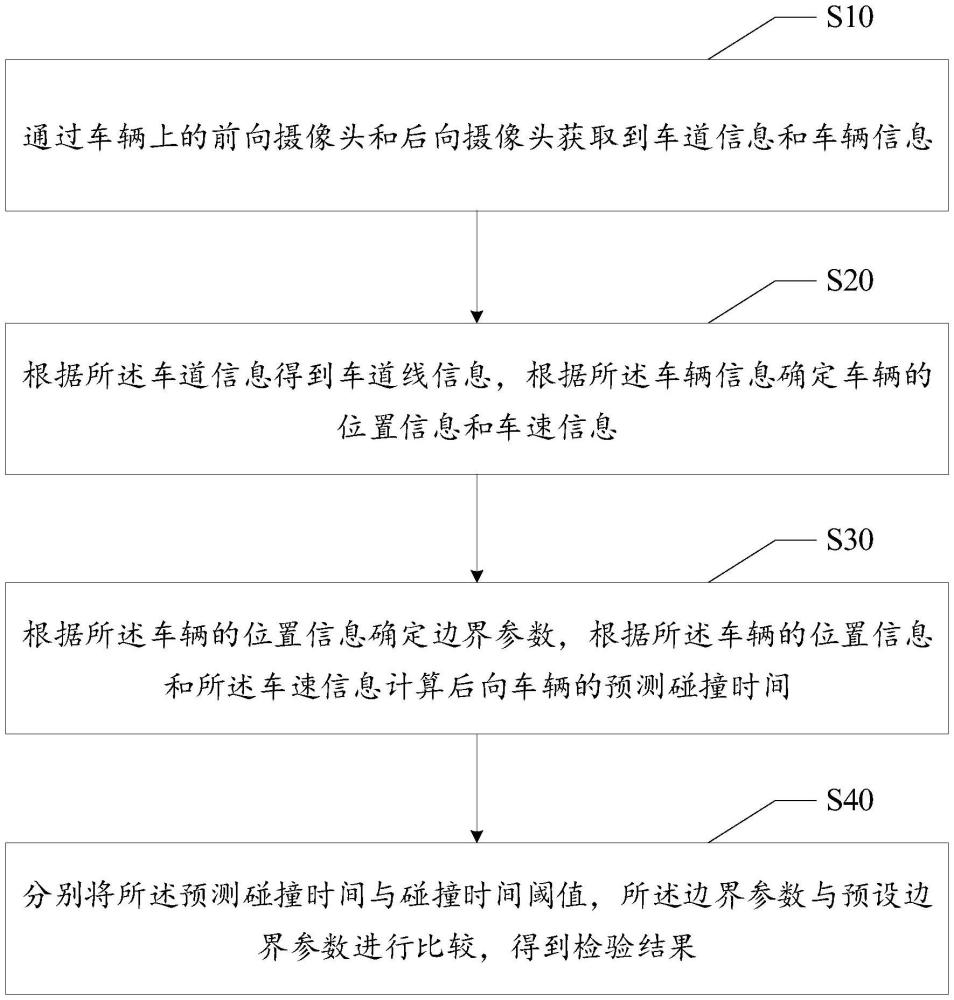
3、通过车辆上的前向摄像头和后向摄像头获取到车道信息和车辆信息;
4、根据所述车道信息得到车道线信息,根据所述车辆信息确定车辆的位置信息和车速信息;
5、根据所述车辆的位置信息确定边界参数,根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间;
6、分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果。
7、在一实施例中,所述根据所述车道信息得到车道线信息的步骤包括:
8、对所述车道信息进行图像增强处理,得到增强车道信息;
9、提取所述增强车道信息的车道线特征和车道边缘特征;
10、对所述车道线特征进行边缘识别,确定车道线类型;
11、对所述车道边缘特征进行边缘识别,得到车道边缘类型;
12、根据所述车道线类型与所述车道边缘类型得到车道信息。
13、在一实施例中,所述根据所述车辆信息确定车辆的位置信息和车速信息包括:
14、对所述车辆信息进行图像增强处理,得到增强车道信息;
15、提取所述增强车道信息中的车辆特征点;
16、对所述车辆特征点进行立体匹配,得到所述车辆特征点的景深信息;
17、根据所述景深信息计算得到相对横/纵向距离和纵向车速;
18、根据所述相对横纵向距离和所述纵向车速得到车辆的位置信息和车速信息。
19、在一实施例中,所述对所述车辆特征点进行立体匹配,得到所述车辆特征点的景深信息包括:
20、确定所述车辆特征点在所述增强车道信息中的图像坐标;
21、根据所述图像坐标确定所述车辆特征点在横向的坐标差值;
22、根据双目摄像头的焦距、双目摄像头的间距和所述车辆特征点在横向的坐标差值计算得到所述车辆特征点的景深信息。
23、在一实施例中,所述根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间的步骤包括:
24、在当前车辆处于变道区域时,确定目标变道车道;
25、根据所述车辆的位置信息确定在成功变道到所述目标变道车道后,所述当前车辆的前车的位置信息和后车的位置信息;
26、根据所述前车的位置信息和所述后车的位置信息得到可变道区域;
27、根据所述当前车辆与所述可变道区域得到碰撞边界;
28、根据所述当前车辆的车速和后车的车速信息得到速度差;
29、根据所述速度差和所述碰撞边界确定预测碰撞时间。
30、在一实施例中,所述在当前车辆处于变道区域时,确定目标变道车道的步骤之前还包括:
31、确定所述车道线的类型,在所述车道线的类型为可变道车道线类型时,确定当前车辆处于变道区域,所述车道线类型至少包括单虚线车道线、双虚线车道线和虚实线车道线。
32、在一实施例中,所述分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果的步骤之后还包括:
33、根据所述检验结果进行结果分类,并对所述检验结果所属的结果分类的计数器进行更新,得到分类计数值;
34、对所述结果分类的分类计数值求和,得到检验轮数;
35、在所述检验轮数等于预设检测轮数时,结束检验。
36、此外,为实现上述目的,本申请还提出一种车辆触发变道的检验装置,所述车辆触发变道的检验装置包括:
37、信息采集模块,用于通过车辆上的前向摄像头和后向摄像头获取到车道信息和车辆信息;
38、信息处理模块,用于根据所述车道信息得到车道线信息,根据所述车辆信息确定车辆的位置信息和车速信息;
39、信息计算模块,用于根据所述车辆的位置信息确定边界参数,根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间;
40、信息校验模块,用于分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果。
41、此外,为实现上述目的,本申请还提出一种车辆触发变道的检验设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的车辆触发变道的检验方法的步骤。
42、此外,为实现上述目的,本申请还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的车辆触发变道的检验方法的步骤。
43、此外,为实现上述目的,本申请还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的车辆触发变道的检验方法的步骤。
44、本申请提出的一个或多个技术方案,至少具有以下技术效果:通过车辆上的前向摄像头和后向摄像头获取到车道信息和车辆信息,根据所述车道信息得到车道线信息,根据所述车辆信息确定车辆的位置信息和车速信息,根据所述车辆的位置信息确定边界参数,根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间,分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果,本申请能够使触发变道性能相关测试调整为客观测试,提升检验准确率。
技术特征:
1.一种车辆触发变道的检验方法,其特征在于,所述车辆触发变道的检验方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述车道信息得到车道线信息的步骤包括:
3.如权利要求1所述的方法,其特征在于,所述根据所述车辆信息确定车辆的位置信息和车速信息包括:
4.如权利要求3所述的方法,其特征在于,所述对所述车辆特征点进行立体匹配,得到所述车辆特征点的景深信息包括:
5.如权利要求1所述的方法,其特征在于,所述根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间的步骤包括:
6.如权利要求5所述的方法,其特征在于,所述在当前车辆处于变道区域时,确定目标变道车道的步骤之前还包括:
7.如权利要求1-6中任一项所述的方法,其特征在于,所述分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果的步骤之后还包括:
8.一种车辆触发变道的检验装置,其特征在于,所述装置包括:
9.一种车辆触发变道的检验设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如权利要求1至7中任一项所述的车辆触发变道的检验方法的步骤。
10.一种存储介质,其特征在于,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的车辆触发变道的检验方法的步骤。
技术总结
本申请公开了一种车辆触发变道的检验方法、装置、设备及存储介质,涉及计算机视觉技术领域,本申请包括:通过车辆上的前向摄像头和后向摄像头获取到车道信息和车辆信息,根据所述车道信息得到车道线信息,根据所述车辆信息确定车辆的位置信息和车速信息,根据所述车辆的位置信息确定边界参数,根据所述车辆的位置信息和所述车速信息计算后向车辆的预测碰撞时间,分别将所述预测碰撞时间与碰撞时间阈值,所述边界参数与预设边界参数进行比较,得到检验结果,本申请能够使触发变道性能相关测试调整为客观测试,提升检验准确率。
技术研发人员:邱小林,易俊宇,吴林,叶成,武侠
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!