混合动力车辆的控制方法和装置、混合动力车辆及介质与流程
本申请涉及车辆控制,尤其涉及一种混合动力车辆的控制方法和装置、混合动力车辆及介质。
背景技术:
1、纯电动车辆和混合动力车辆可以节能减排。其中,以电能为能源的纯电动车辆续航里程较短;而混合动力车辆通过对传动系统的优化改进,将化石燃料和电能结合起来使用,一方面缓解了化石燃料的危机,另一方面弥补了纯电动汽车续航能力差等方面的不足。混合动力车辆的工作模式包括纯电模式、串联模式和并联模式;其中,纯电模式下,动力电池直接给第二电机供电,由第二电机驱动车辆;串联模式下,发动机通过第一电机给动力电池充电,由第二电机驱动车辆;并联模式下,由发动机和第二电机驱动车辆。当混合动力车辆配置不够时,发动机的动力无法单独驱动车辆。因此,在第二电机出故障时,就会造成车辆抛锚,如何在第二电机出故障时,防止混合动力车辆抛锚,成为了亟待解决的技术问题。
技术实现思路
1、本申请实施例的主要目的在于提出一种混合动力车辆的控制方法和装置、混合动力车辆及介质,旨在第二电机出故障时,防止混合动力车辆抛锚。
2、为实现上述目的,本申请实施例的第一方面提出了一种混合动力车辆的控制方法,应用于混合动力车辆,所述混合动力车辆包括发动机、第一电机和第二电机,所述方法包括:
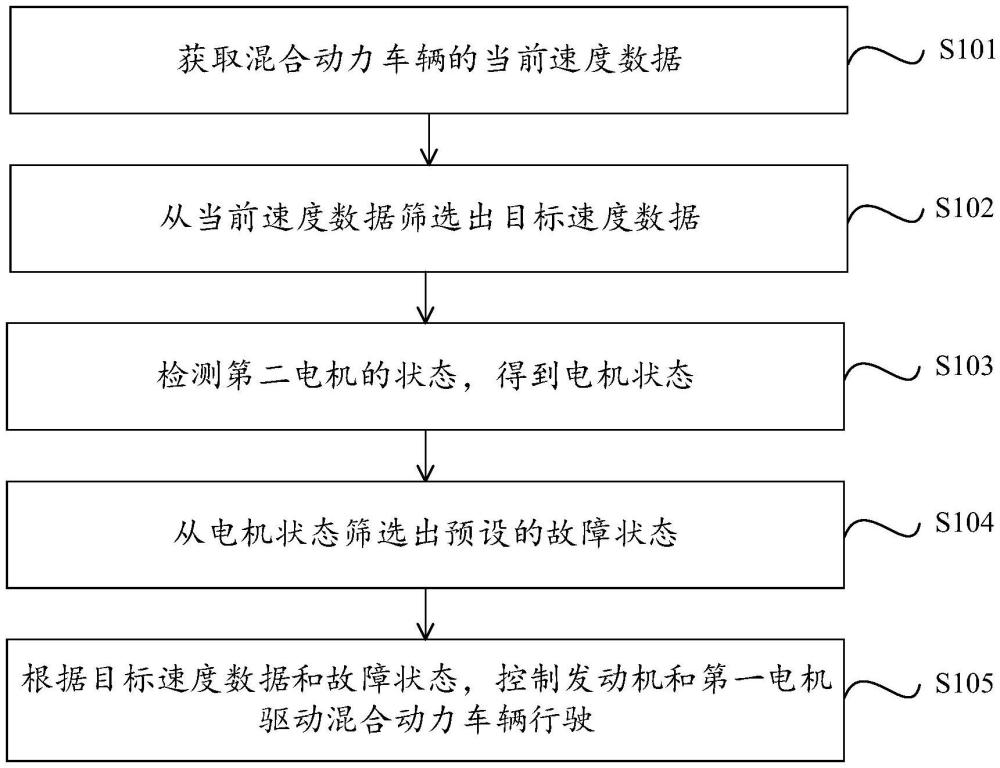
3、获取所述混合动力车辆的当前速度数据;
4、从所述当前速度数据筛选出目标速度数据;
5、检测所述第二电机的状态,得到电机状态;
6、从所述电机状态筛选出预设的故障状态;
7、根据所述目标速度数据和所述故障状态,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶。
8、在一些实施例,所述根据所述目标速度数据和所述故障状态,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶,包括:
9、根据所述目标速度数据和所述故障状态,获取所述混合动力车辆的工作模式,得到当前工作模式;其中,所述当前工作模式包括以下模式之一:纯电模式、串联模式和并联模式;
10、所述当前工作模式为所述纯电模式或所述串联模式时,将所述当前工作模式切换为所述并联模式;
11、所述当前工作模式为所述并联模式时,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶。
12、在一些实施例,所述混合动力车辆包括动力电池,所述当前工作模式为所述纯电模式或所述串联模式时,将所述当前工作模式切换为所述并联模式,包括:
13、所述当前工作模式为所述纯电模式时,获取所述动力电池的电池电量,得到目标电池电量;
14、将所述目标电池电量与预设的第一电量阈值进行比较;
15、若所述目标电池电量小于所述第一电量阈值,则将所述当前工作模式切换为所述串联模式,控制所述混合动力车辆在所述串联模式下滑行,并控制所述发动机驱动所述第一电机为所述动力电池充电;
16、在所述目标电池电量大于或等于预设的第二电量阈值时,将所述当前工作模式切换为所述并联模式;其中,所述第二电量阈值大于所述第一电量阈值。
17、在一些实施例,所述当前工作模式为所述纯电模式或所述串联模式时,将所述当前工作模式切换为所述并联模式,包括:
18、所述当前工作模式为所述串联模式时,将所述目标电池电量与所述第一电量阈值进行比较;
19、若所述目标电池电量小于所述第一电量阈值,则控制所述混合动力车辆在所述串联模式下滑行,并控制所述发动机驱动所述第一电机为所述动力电池充电;
20、在所述目标电池电量大于或等于所述第二电量阈值时,将所述当前工作模式切换为所述并联模式。
21、在一些实施例,所述当前工作模式为所述并联模式时,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶,包括:
22、所述当前工作模式为所述并联模式时,将所述目标电池电量与所述第一电量阈值进行比较;
23、若所述目标电池电量小于所述第一电量阈值,则将所述当前工作模式切换为所述串联模式,控制所述混合动力车辆在所述串联模式下滑行,并控制所述发动机驱动所述第一电机为所述动力电池充电;
24、在所述目标电池电量大于或等于所述第二电量阈值时,将所述当前工作模式切换为所述并联模式,并控制所述发动机和所述第一电机驱动所述混合动力车辆行驶。
25、在一些实施例,所述若所述目标电池电量小于所述第一电量阈值,则将所述当前工作模式切换为所述串联模式,控制所述混合动力车辆在所述串联模式下滑行,并控制所述发动机驱动所述第一电机为所述动力电池充电之后,所述方法还包括:
26、将所述当前速度数据与预设的速度阈值进行比较;
27、在所述当前速度数据与所述速度阈值相等时,将所述当前工作模式切换为所述并联模式,并控制所述发动机和所述第一电机驱动所述混合动力车辆行驶。
28、在一些实施例,所述检测所述第二电机的状态,得到电机状态之后,所述方法还包括:
29、从所述电机状态筛选出预设的正常状态;
30、根据所述正常状态,控制所述第二电机驱动所述混合动力车辆行驶。
31、为实现上述目的,本申请实施例的第二方面提出了一种混合动力车辆的控制装置,应用于混合动力车辆,所述混合动力车辆包括发动机、第一电机和第二电机,所述装置包括:
32、获取模块,用于获取所述混合动力车辆的当前速度数据;
33、第一筛选模块,用于从所述当前速度数据筛选出目标速度数据;
34、检测模块,用于检测所述第二电机的状态,得到电机状态;
35、第二筛选模块,用于从所述电机状态筛选出预设的故障状态;
36、控制模块,用于根据所述目标速度数据和所述故障状态,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶。
37、为实现上述目的,本申请实施例的第三方面提出了一种混合动力车辆,所述混合动力车辆包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
38、为实现上述目的,本申请实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
39、本申请提出的混合动力车辆的控制方法和装置、混合动力车辆及介质,通过获取混合动力车辆的当前速度数据;从当前速度数据筛选出目标速度数据。检测第二电机的状态,得到电机状态;从电机状态筛选出预设的故障状态。根据目标速度数据和故障状态,控制发动机和第一电机驱动混合动力车辆行驶。即本申请从当前速度数据筛选出目标速度数据时,若判断出第二电机处于故障状态下,则控制发动机和第一电机驱动混合动力车辆行驶。防止第二电机故障时,混合动力车辆直接抛锚,降低了安全隐患。
技术特征:
1.一种混合动力车辆的控制方法,其特征在于,应用于混合动力车辆,所述混合动力车辆包括发动机、第一电机和第二电机,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标速度数据和所述故障状态,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶,包括:
3.根据权利要求2所述的方法,其特征在于,所述混合动力车辆包括动力电池,所述当前工作模式为所述纯电模式或所述串联模式时,将所述当前工作模式切换为所述并联模式,包括:
4.根据权利要求3所述的方法,其特征在于,所述当前工作模式为所述纯电模式或所述串联模式时,将所述当前工作模式切换为所述并联模式,包括:
5.根据权利要求3所述的方法,其特征在于,所述当前工作模式为所述并联模式时,控制所述发动机和所述第一电机驱动所述混合动力车辆行驶,包括:
6.根据权利要求5所述的方法,其特征在于,所述若所述目标电池电量小于所述第一电量阈值,则将所述当前工作模式切换为所述串联模式,控制所述混合动力车辆在所述串联模式下滑行,并控制所述发动机驱动所述第一电机为所述动力电池充电之后,所述方法还包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述检测所述第二电机的状态,得到电机状态之后,所述方法还包括:
8.一种混合动力车辆的控制装置,其特征在于,应用于混合动力车辆,所述混合动力车辆包括发动机、第一电机和第二电机,所述装置包括:
9.一种混合动力车辆,其特征在于,所述混合动力车辆包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的混合动力车辆的控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的混合动力车辆的控制方法。
技术总结
本申请实施例提供了一种混合动力车辆的控制方法和装置、混合动力车辆及介质,属于车辆控制技术领域。该方法包括:获取混合动力车辆的当前速度数据;从当前速度数据筛选出目标速度数据。检测第二电机的状态,得到电机状态;从电机状态筛选出预设的故障状态。根据目标速度数据和故障状态,控制发动机和第一电机驱动混合动力车辆行驶。即本申请从当前速度数据筛选出目标速度数据时,若判断出第二电机处于故障状态下,则控制发动机和第一电机驱动混合动力车辆行驶。防止第二电机故障时,混合动力车辆直接抛锚,降低了安全隐患。
技术研发人员:高阳,黄政,王嫚,黄孝奎,王瑞光,黄伟山,刘义强
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!