一种汇入主路前的停车方法、装置、设备及介质与流程
本发明涉及智能驾驶,特别涉及一种汇入主路前的停车方法、装置、设备及介质。
背景技术:
1、智能驾驶车辆在由匝道汇入主路时,如果主路的交通流较大,无法找到最佳的变道时机,而车辆会越来越靠近车道尽头。目前已有技术方案是通过报警提醒驾驶员接管,并在一定时间或距离后退出智驾功能或者执行减速控制,但如果驾驶员因为注意力分散或突发疾病等原因一直未接管车辆,则可能会有发生交通事故的风险。为此,上述问题亟待本领域技术人员解决。
技术实现思路
1、有鉴于此,本发明的目的在于提一种汇入主路前的停车方法、装置、设备及介质供,能够保证停车轨迹的平滑性与安全性,以便在汇入主路失败且驾驶员未接管的情况下进行安全停车,其具体方案如下:
2、第一方面,本申请公开了一种汇入主路前的停车方法,包括:
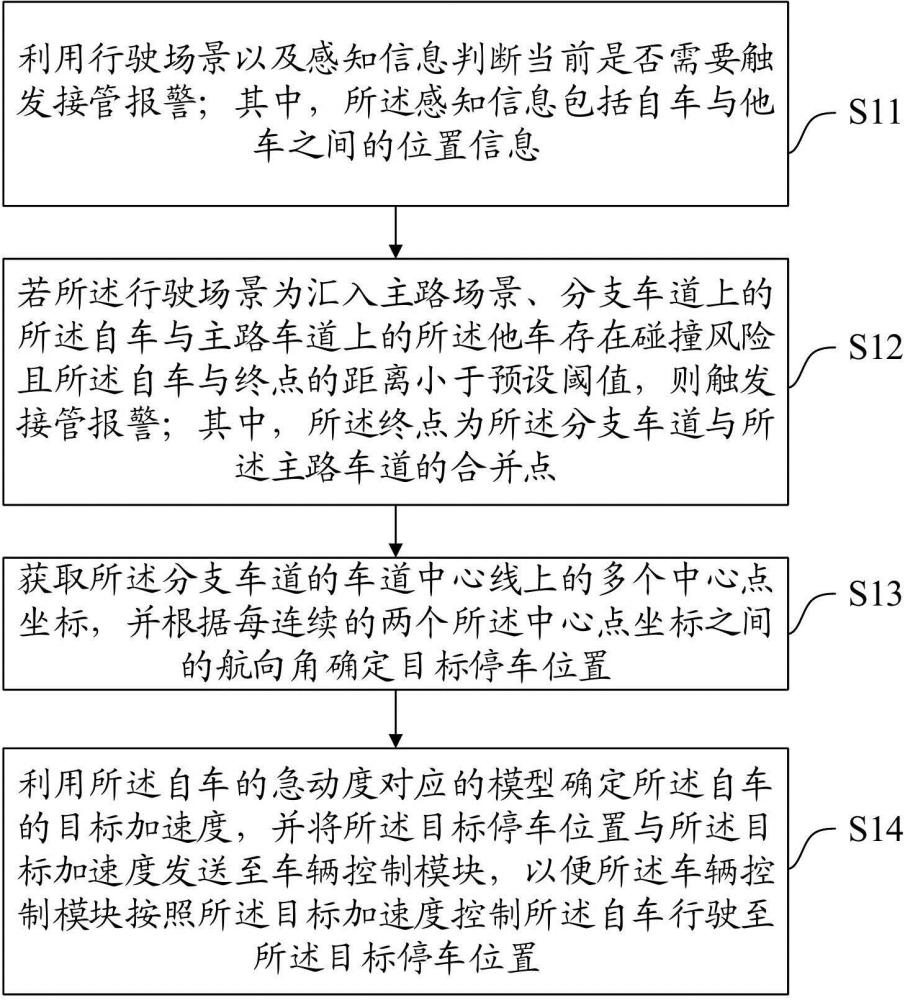
3、利用行驶场景以及感知信息判断当前是否需要触发接管报警;其中,所述感知信息包括自车与他车之间的位置信息;
4、若所述行驶场景为汇入主路场景、分支车道上的所述自车与主路车道上的所述他车存在碰撞风险且所述自车与终点的距离小于预设阈值,则触发接管报警;其中,所述终点为所述分支车道与所述主路车道的合并点;
5、获取所述分支车道的车道中心线上的多个中心点坐标,并根据每连续的两个所述中心点坐标之间的航向角确定目标停车位置;
6、利用所述自车的急动度对应的模型确定所述自车的目标加速度,并将所述目标停车位置与所述目标加速度发送至车辆控制模块,以便所述车辆控制模块按照所述目标加速度控制所述自车行驶至所述目标停车位置。
7、可选的,所述根据每连续的两个所述中心点坐标之间的航向角确定目标停车位置,包括
8、根据每连续的两个所述中心点坐标之间的航向角确定每连续的两个航向角之间的差值;
9、若存在任一连续的两个航向角之间的差值大于预设值,则将与所述任一连续的两个航向角对应的三个所述中心点坐标中,位于中间位置的所述中心点坐标确定为所述目标停车位置。
10、可选的,所述汇入主路前的停车方法,还包括:
11、根据目标轨迹函数的三阶导数确定所述自车的急动度;所述目标轨迹函数为次数大于目标次的多项式函数,所述目标轨迹函数包含多个未知系数。
12、可选的,所述目标轨迹函数包括:
13、;
14、其中,、、、、、表示所述多个未知系数;
15、相应的,所述急动度包括:
16、。
17、可选的,所述利用所述自车的急动度对应的模型确定所述自车的目标加速度之前,还包括:
18、对所述自车的所述急动度的平方进行积分,得到所述自车的急动度对应的所述模型。
19、可选的,所述利用所述自车的急动度对应的模型确定所述自车的目标加速度,包括:
20、根据约束条件确定所述多个未知系数的多个取值组合,并确定所述模型在所述多个取值组合下的值,以得到最小值;
21、从所述多个取值组合中确定使所述模型具备所述最小值的目标取值组合,并根据所述目标取值组合确定所述自车的所述目标加速度。
22、可选的,所述约束条件包括与所述自车在初始时刻的位置、初始时刻的速度以及初始时刻的加速度有关的第一约束条件、与所述自车在终点时刻的位置与终点时刻的速度有关的第二约束条件、与所述自车的最大加速度有关的第三约束条件以及与所述自车的最大急动度有关的第四约束条件。
23、第二方面,本申请公开了一种汇入主路前的停车装置,包括:
24、信息获取模块,用于利用行驶场景以及感知信息判断当前是否需要触发接管报警;其中,所述感知信息包括自车与他车之间的位置信息;
25、接管报警模块,用于若所述行驶场景为汇入主路场景、分支车道上的所述自车与主路车道上的所述他车存在碰撞风险且所述自车与终点的距离小于预设阈值,则触发接管报警;其中,所述终点为所述分支车道与所述主路车道的合并点;
26、位置确定模块,用于获取所述分支车道的车道中心线上的多个中心点坐标,并根据每连续的两个所述中心点坐标之间的航向角确定目标停车位置;
27、安全停车模块,用于利用所述自车的急动度对应的模型确定所述自车的目标加速度,并将所述目标停车位置与所述目标加速度发送至车辆控制模块,以便所述车辆控制模块按照所述目标加速度控制所述自车行驶至所述目标停车位置。
28、第三方面,本申请公开了一种电子设备,包括:
29、存储器,用于保存计算机程序;
30、处理器,用于执行所述计算机程序,以实现前述公开的汇入主路前的停车方法。
31、第四方面,本申请公开了一种计算机可读存储介质,用于保存计算机程序;其中,所述计算机程序被处理器执行时实现前述公开的汇入主路前的停车方法。
32、可见,本申请提出一种汇入主路前的停车方法,包括:利用行驶场景以及感知信息判断当前是否需要触发接管报警;其中,所述感知信息包括自车与他车之间的位置信息;若所述行驶场景为汇入主路场景、分支车道上的所述自车与主路车道上的所述他车存在碰撞风险且所述自车与终点的距离小于预设阈值,则触发接管报警;其中,所述终点为所述分支车道与所述主路车道的合并点;获取所述分支车道的车道中心线上的多个中心点坐标,并根据每连续的两个所述中心点坐标之间的航向角确定目标停车位置;利用所述自车的急动度对应的模型确定所述自车的目标加速度,并将所述目标停车位置与所述目标加速度发送至车辆控制模块,以便所述车辆控制模块按照所述目标加速度控制所述自车行驶至所述目标停车位置。
33、有益效果:本申请首先判断当前行驶场景是否为汇入主路场景,如果是并且行驶于分支车道的自车与行驶于主路车道的他车存在碰撞风险以及自车与终点的距离小于预设阈值,则表明当前不具备汇入条件,则需要触发接管报警以便进行停车。在触发接管报警后,本申请根据自车所在的分支车道的车道中心线上的中心点坐标确定目标停车位置,考虑到急动度表示加速度在单位时间的变化量,若急动度很小或接近于零,则加速度的变化便很小甚至几乎没有变化,从而速度的变化也会更加平稳,为此,本申请确定了与急动度对应的模型,并通过该模型确定自车的目标加速度,以保证停车轨迹的平滑性与安全性,以便在汇入主路失败且驾驶员未接管的情况下进行安全停车。
技术特征:
1.一种汇入主路前的停车方法,其特征在于,包括:
2.根据权利要求1所述的汇入主路前的停车方法,其特征在于,所述根据每连续的两个所述中心点坐标之间的航向角确定目标停车位置,包括
3.根据权利要求1所述的汇入主路前的停车方法,其特征在于,还包括:
4.根据权利要求3所述的汇入主路前的停车方法,其特征在于,所述目标轨迹函数包括:
5.根据权利要求1所述的汇入主路前的停车方法,其特征在于,所述利用所述自车的急动度对应的模型确定所述自车的目标加速度之前,还包括:
6.根据权利要求5所述的汇入主路前的停车方法,其特征在于,所述利用所述自车的急动度对应的模型确定所述自车的目标加速度,包括:
7.根据权利要求6所述的汇入主路前的停车方法,其特征在于,所述约束条件包括与所述自车在初始时刻的位置、初始时刻的速度以及初始时刻的加速度有关的第一约束条件、与所述自车在终点时刻的位置与终点时刻的速度有关的第二约束条件、与所述自车的最大加速度有关的第三约束条件以及与所述自车的最大急动度有关的第四约束条件。
8.一种汇入主路前的停车装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,用于保存计算机程序;其中,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的汇入主路前的停车方法。
技术总结
本申请公开了一种汇入主路前的停车方法、装置、设备及介质,涉及智能驾驶技术领域,包括:利用行驶场景以及感知信息判断当前是否需要触发接管报警;若行驶场景为汇入主路场景、分支车道上的自车与主路车道上的他车存在碰撞风险且自车与终点的距离小于预设阈值,则触发接管报警;其中,终点为分支车道与主路车道的合并点;获取分支车道的车道中心线上的多个中心点坐标,并根据每连续的两个中心点坐标之间的航向角确定目标停车位置;利用自车的急动度对应的模型确定自车的目标加速度,并将目标停车位置与目标加速度发送至车辆控制模块,以便车辆控制模块按照目标加速度控制自车行驶至目标停车位置。本申请保证了停车轨迹的平滑性与安全性。
技术研发人员:崔然然,刘佳奇,韩晋,卢玉坤,李双江
受保护的技术使用者:知行汽车科技(苏州)股份有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!