用于支承高架供电轨道的系统和方法与流程
本发明涉及一种用于将暴露的轨道支承在地面上方的抬高位置处的系统和方法。更具体地,本发明涉及一种组件,该组件包括安装在模块化支承结构的护栏内的具有凹部的板和支柱,用于定位用于为移动车辆供电的供电轨道的节段。
背景技术:
1、重型作业机械,例如土方车辆或拖运卡车,需要很大的动力才能执行其功能。这些机械本身重量很大,并且它们的负载需要大量的动力来移动。柴油发动机通常提供这种动力,但它们会有缺点。例如,在一些实施方案中,重型作业机械可能需要在崎岖地形中长距离行驶。例如,在偏远的采矿场,这些机械组通常用于沿着在采矿场内的各个地点之间延伸的道路或拖运路线/运输路线运送极端负载。柴油机燃料的供应可能远离这些地点或者不容易运送到这些地点。此外,柴油机组会产生严重的污染。
2、基于地面的供电轨道可以向诸如重型作业机械的行驶车辆提供电力。在某些环境中,例如对于在固定轨道上行驶的火车或地铁,固定轨道与供电轨道之间的精确对准可以确保在车辆移动时可靠地输送电力。然而,对于能自由转向的重型作业机械来说,建立和维持与供电轨道的电连接可能具有挑战性。某些环境(例如采矿场)中的地形可能是不平坦的、多丘陵的和坑洼不平的,这可能会导致转向偏差,从而会干扰沿拖运路线与供电轨道的连续连接。此外,靠近地面的供电轨道(如火车和地铁的供电轨道)可能会给人员带来安全风险,并且在肮脏的环境中会受到行驶路径上的碎片的影响。
3、国际专利申请公开号wo2020/186296a1(“'296申请”)中描述了一种为在道路上行驶的作业机械提供电力的方法。'296申请描述了一种在矿场用于移动车辆的电力输送系统,其中两个或多个导体锚固在可重新定位的路侧护栏的侧面。在'296申请的一个实施例中,导体嵌入水平通道内,该水平通道具有形成在电绝缘材料主体中的v形入口,并且柔性附件将主体连接到路侧护栏或杆的一侧。因此,'296申请的输送系统需要从车辆上的可伸缩臂的精确移动来将嵌入的导体与水平通道接合。另外,'296申请的输送系统没有考虑到将导体安装在路侧护栏可触及的范围内或已安装系统中导体的可更换性的安全问题。结果,'296申请的输送系统不适合沿着拖运路线将供电轨道安装在模块化支承结构中以便为在不同地形中或在人员或野生动物附近操纵的重型作业机械供电。
4、本发明的多个示例旨在克服此类系统的缺陷。
技术实现思路
1、在本发明的一方面,一种用于导电轨道的支承结构包括沿着纵向轴线从下部区域延伸到上部区域的介电支柱以及第一介电板,该第一介电板具有基本上垂直于纵向轴线设置的第一顶部部分、和基本上平坦的前表面。第一顶部部分具有第一凹形表面、第一轨道接纳凹部和第二轨道接纳凹部,而第一凹形表面设置在第一轨道接纳凹部和第二轨道接纳凹部之间。支承结构还包括第二介电板,该第二介电板具有基本上垂直于纵向轴线设置的第二顶部部分、和基本上平坦的后表面。第二顶部部分具有第二凹形表面、第三轨道接纳凹部和第四轨道接纳凹部,而第二凹形表面设置在第三轨道接纳凹部和第四轨道接纳凹部之间。第一介电板和第二介电板连接到介电支柱,使得前表面设置为与后表面相对且面向后表面,并且与后表面间隔开第一距离。
2、在本发明的另一方面,一种装置包括:细长形/长圆形基座,其具有沿着水平轴线与第二端分开的第一端;第一轨道支承结构,其沿着第一基本上竖直的轴线定位在细长形基座的第一端处;以及第二轨道支承结构,其沿着第二基本上竖直的轴线定位在细长形基座的第二端处。第一轨道支承结构包括第一介电支柱和第一介电板,第一介电板具有第一顶部部分,该第一顶部部分具有位于第一轨道接纳凹部和第二轨道接纳凹部之间的第一凹形表面。第二轨道支承结构包括第二介电支柱和第二介电板,第二介电板具有第二顶部部分,该第二顶部部分具有位于第三轨道接纳凹部和第四轨道接纳凹部之间的第二凹形表面。第一导电轨道位于第一轨道接纳凹部和第三轨道接纳凹部内,而第二导电轨道位于第二轨道接纳凹部和第四轨道接纳凹部内。
3、在本发明的又一方面,一种方法包括将可移动支承结构放置在地面上,该可移动支承结构具有沿着水平轴线由基座分隔开的第一端和第二端;以及将第一介电支柱的下部部分插入到连接至第一端的第一保持器中。第一介电支柱具有在第一介电支柱的相对两侧支承第一基本上平行的介电板的上部部分。该方法包括将第二介电支柱的下部部分插入到连接至第二端的第二保持器中,其中第二介电支柱具有在第二介电支柱的相对两侧支承第二基本上平行的介电板的上部部分。第一介电支柱的下部部分布置在第一保持器中并且第二介电支柱的下部部分布置在第二保持器中,以将第一对轨道接纳凹部定位在第一平行介电板上并将第二对轨道接纳凹部定位在第二平行介电板上,用于接纳第一导电轨道。该方法包括将第一介电支柱的下部部分固定至第一保持器以及将第二介电支柱的下部部分固定至第二保持器。
技术特征:
1.一种用于从供电导电轨道组件接收电力的移动式机械的供电导体连杆机构,包括:
2.根据权利要求1所述的移动式机械的供电导体连杆机构,其中,可移动的导体臂组件包括第一臂组件和第二臂组件。
3.根据权利要求2所述的移动式机械的供电导体连杆机构,其中,所述可移动的导体臂组件的所述第一臂组件是附接到所述移动式机械的最前端的伸缩臂。
4.根据权利要求3所述的移动式机械的供电导体连杆机构,所述伸缩臂具有两种构型:
5.根据权利要求4所述的移动式机械的供电导体连杆机构,其中,所述伸缩臂仅沿着单个公共平面延伸。
6.根据权利要求5所述的移动式机械的供电导体连杆机构,其中,所述单个公共平面是竖直平面。
7.根据权利要求2所述的移动式机械的供电导体连杆机构,其中,所述第二臂组件包括多个拖曳臂。
8.一种用于从供电导电轨道组件接收电力的移动式机械的供电导体连杆机构,包括:
9.根据权利要求8所述的移动式机械的供电导体连杆机构,所述伸缩式导体臂组件具有两种构型:
10.根据权利要求9所述的移动式机械的供电导体连杆机构,其中,所述伸缩式导体臂组件仅沿公共平面延伸。
11.根据权利要求10所述的移动式机械的供电导体连杆机构,其中,所述单个公共平面是竖直平面。
12.根据权利要求8所述的移动式机械的供电导体连杆机构,所述伸缩式导体臂组件包括第一伸缩式臂组件和第二拖曳臂组件。
13.根据权利要求12所述的移动式机械的供电导体连杆机构,其中,所述第二拖曳臂组件包括多个拖曳臂。
14.根据权利要求8所述的移动式机械的供电导体连杆机构,所述伸缩式导体臂组件还包括容纳在所述伸缩式导体臂组件内的气动控制系统,以调节流体的运动来延伸或缩回所述伸缩式导体臂组件。
15.一种用于从供电导电轨道组件接收电力的移动式机械的供电导体连杆机构,包括:
16.根据权利要求15所述的移动式机械的供电导体连杆机构,所述可移动的导体臂组件沿着公共平面延伸,其中所述可移动的导体臂组件具有两种构型:
17.根据权利要求16所述的移动式机械的供电导体连杆机构,其中,所述单个公共平面是竖直平面。
18.根据权利要求17所述的移动式机械的供电导体连杆机构,其中,所述第二臂组件包括能够接合所述供电导电轨道组件的接触器。
19.根据权利要求15所述的移动式机械的供电导体连杆机构,其中,所述第二臂组件包括多个拖曳臂。
20.根据权利要求15所述的移动式机械的供电导体连杆机构,所述可移动的导体臂组件还包括容纳在所述可移动的导体臂组件内的气动控制系统,以调节流体并控制所述供电导体连杆机构的多个部分的运动。
技术总结
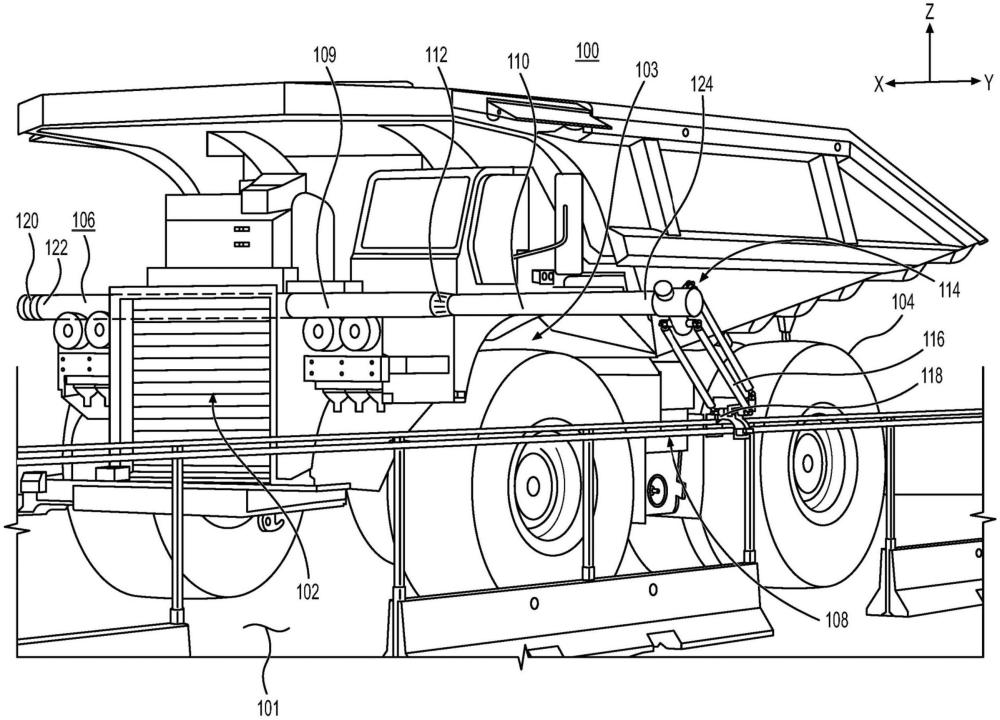
本发明涉及一种模块化结构,其支承用于将电力输送到移动作业机械(100)例如采矿场的运输车的高架轨道节段(240)。路侧护栏(204)的相对端包含竖直布置的互补管状联接器(206,208)。定位在其中一个管状联接器中的介电支柱(220A)的下端在上端处具有对向的介电板(226A,228A)。每个板的顶部边缘(802)都在一对轨道接纳凹部(804,806)之间具有爬电凹腔(814)。具有类似构造的另一介电支柱(220B)定位在另一个管状联接器中。联接器和支柱内的孔确保其中放置导电轨道(234A)的相应轨道接纳凹部的对准。介电插入件(810A,812A)将轨道摩擦锁定到轨道接纳凹部中。
技术研发人员:I·斯特拉施尼
受保护的技术使用者:卡特彼勒环球矿业设备有限责任公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!