车辆行驶横向稳定性控制方法、装置、设备及存储介质与流程
本发明属于车辆控制,尤其涉及车辆行驶横向稳定性控制方法、装置、设备及存储介质。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、近年来,随着汽车产业的发展,电动汽车的研究与应用成为解决环境污染和能源危机的有效手段。分布式驱动电动汽车各个车轮转矩可由轮毂电机单独控制,表现出良好的机动性、控制的灵活性,也为提高车辆行驶稳定性和安全性提供了更多的可能性。
3、在提高车辆(以分布式驱动电动汽车为例)的行驶稳定性控制算法设计中,多数研究在以质心侧偏角和横摆角速度为联合控制目标时,未考虑二者之间的耦合关系,在控制器设计中控制变量所占的权重系数为固定值,不能随着行驶工况和车辆运动状态的改变而自适应调整,从而影响分布式电驱动车辆行驶时的横向稳定性。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种车辆行驶横向稳定性控制方法、装置、设备及存储介质,可提高分布式电驱动车辆行驶时的横向稳定性。
2、所述技术方案如下:
3、一方面,提供车辆行驶横向稳定性控制方法,所述方法包括:
4、获取车辆当前的质心侧偏角和横摆角速度;
5、以所述质心侧偏角的偏差和所述横摆角速度的偏差作为模糊控制器输入,利用模糊控制规则确定所述质心侧偏角和所述横摆角速度的权重系数;
6、基于所得到权重系数,以所述质心侧偏角和所述横摆角速度为控制目标,基于滑模控制器确定附加横摆力矩;
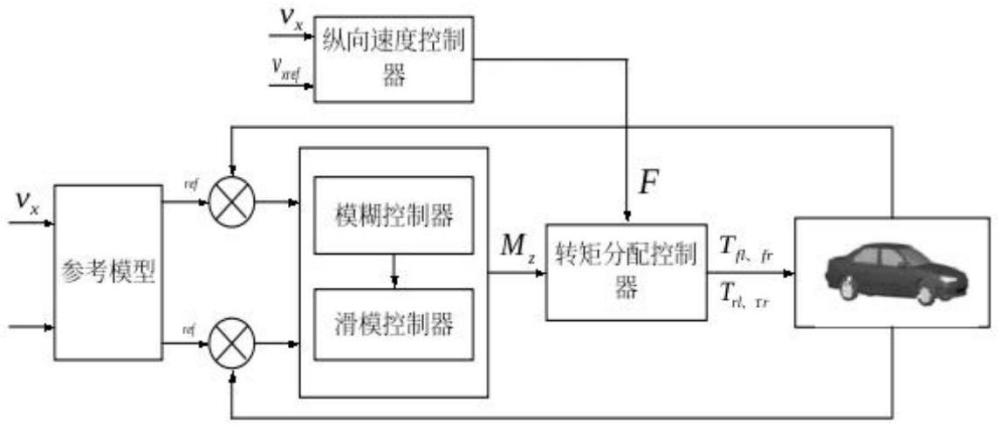
7、结合所计算的附加横摆力矩,以轮胎附着利用率最小作为优化目标,确定车辆各驱动轮的目标车轮力矩,根据所述目标车轮力矩控制所述车辆的行驶。
8、另一方面,提供车辆行驶横向稳定性控制系统,包括:
9、获取模块,用于获取车辆当前的质心侧偏角和横摆角速度;
10、第一确定模块,用于以所述质心侧偏角的偏差和所述横摆角速度的偏差作为模糊控制器输入,利用模糊控制规则确定所述质心侧偏角和所述横摆角速度的权重系数;
11、第二确定模块,用于基于所得到权重系数,以所述质心侧偏角和所述横摆角速度为控制目标,基于滑模控制器确定附加横摆力矩;
12、控制模块,用于结合所计算的附加横摆力矩,以轮胎附着利用率最小作为优化目标,确定车辆各驱动轮的目标车轮力矩,根据所述目标车轮力矩控制所述车辆的行驶。
13、另一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现上述任一所述车辆的车辆行驶横向稳定性控制方法。
14、另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现上述任一所述提供车辆行驶横向稳定性控制方法。
15、另一方面,还提供了一种计算机程序产品或计算机程序,所述计算机程序产品或计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中。计算机设备的处理器从所述计算机可读存储介质读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行上述任一所述提供车辆行驶横向稳定性控制方法。
16、以上一个或多个技术方案存在以下有益效果:
17、在本发明中,以质心侧偏角和横摆角速度为控制目标基于滑模控制器实现整车附加横摆力矩的计算,作为上层控制;基于上层控制得到的附加横摆力矩,以轮胎附着利用率最小为优化目标,对车辆轮胎力矩进行分配,作为下层控制;其中,在上层控制中,通过质心侧偏角和横摆角速度的偏差,利用模糊规则确定权重系数取值,实现权重系数随车辆的运动状态而自适应调整,能够有效提高了分布式电驱动车辆行驶时的横向稳定性。
18、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.车辆行驶横向稳定性控制方法,其特征在于,包括:
2.如权利要求1所述的车辆行驶横向稳定性控制方法,其特征在于,所述质心侧偏角的偏差和所述横摆角速度的偏差的确定,具体为:
3.如权利要求1所述的车辆行驶横向稳定性控制方法,其特征在于,所述模糊规则具体为:
4.如权利要求1或3所述的车辆行驶横向稳定性控制方法,其特征在于,以所述质心侧偏角的偏差和所述横摆角速度的偏差作为模糊控制器输入,利用模糊控制规则确定所述质心侧偏角和所述横摆角速度的权重系数,具体为:
5.如权利要求1所述的车辆行驶横向稳定性控制方法,其特征在于,在基于滑模控制器确定附加横摆力矩中,将饱和函数替换符号函数,以削弱抖振。
6.如权利要求1所述的车辆行驶横向稳定性控制方法,其特征在于,结合所计算的附加横摆力矩,以轮胎附着利用率最小作为优化目标,确定车辆各驱动轮的目标车轮力矩,具体为:
7.如权利要求6所述的车辆行驶横向稳定性控制方法,其特征在于,所述车辆驱动力的确定为:获取车辆的当前行驶速度,以车辆当前行驶速度和目标车速作为pid控制器的输入,得到车辆总驱动力。
8.车辆行驶横向稳定性控制装置,其特征在于,包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现如权利要求1至7任一所述的车辆行驶横向稳定性控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现如权利要求1至7任一所述车辆行驶横向稳定性控制方法。
技术总结
本发明提出了一种车辆行驶横向稳定性控制方法、装置、设备及存储介质,上层控制中,以质心侧偏角和横摆角速度为控制目标基于滑模控制器实现整车附加横摆力矩的计算;下层控制中,基于上层控制得到的附加横摆力矩,以轮胎附着利用率最小为优化目标,对车辆轮胎力矩进行分配;其中,在上层控制中,通过质心侧偏角和横摆角速度的偏差,利用模糊规则确定权重系数取值,实现权重系数随车辆的运动状态而自适应调整,能够有效提高了分布式电驱动车辆行驶时的横向稳定性。
技术研发人员:孔昕昕,宋攀,田冠男,张师榕,林聪,桂缀,付建,徐雪松
受保护的技术使用者:奇瑞汽车股份有限公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!