本发明型属于线控制动,涉及一种线控制动装置。
背景技术:
1、传统汽车制动助力技术方案主要是由真空泵+真空软管+真空罐+真空助力器组成,这种采用真空助力的结构占用空间较大且成本较高,且无法线性控制。
2、目前,汽车的智能驾驶趋势越来越明显,对于l3以上自动驾驶不可避免的牵扯到主动刹车,即由行车电脑(ecu)根据路况判断后由ecu直接控制刹车系统进行刹车。现有真空助力的技术方案无法满足该需求。
技术实现思路
1、本发明要解决的技术问题是提供一种电动助力的线控制动装置。
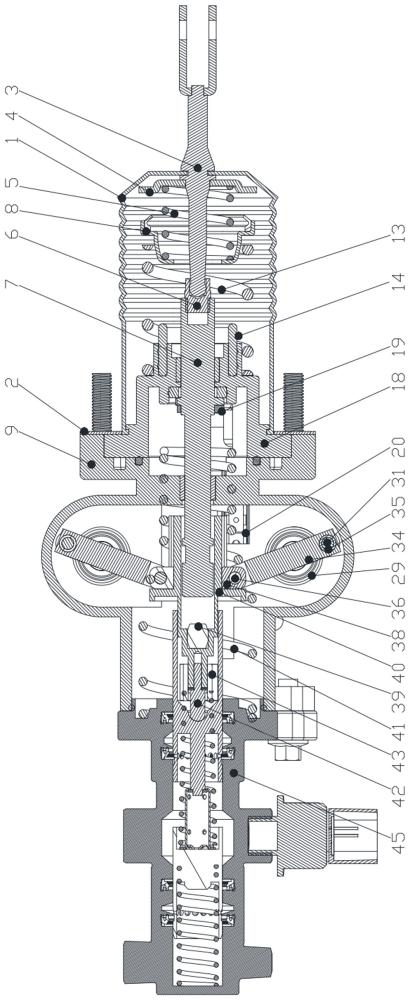
2、为了解决上述技术问题,本发明采用如下技术方案:一种线控制动装置,包括踏板模拟器、壳体、后盖、主缸分总成、位移传感器、控制单元和电动助力机构,所述踏板模拟器包括推杆、顶杆连接头、顶杆、踏板安装座,所述主缸分总成包括主缸缸体、主缸活塞、回位弹簧、主缸推杆、液压传感器;所述壳体的一端与踏板安装座相连,另一端与主缸缸体相连;所述主缸推杆包括筒状部和杆状部,杆状部的下端过盈安装有延伸杆,杆状部和延伸杆插装于主缸活塞内,所述顶杆的下端插入在主缸推杆的筒状部内,主缸推杆的筒状部外周面设有两个对称的轴向滑槽,在轴向滑槽的下端设有限位凸台;所述电动助力机构包括电机、行星齿轮组、两个齿轮、两根曲轴、两根连杆和两个滑块,两个滑块分别活动安装在主缸推杆的筒状部的轴向滑槽内,两个滑块的外侧端各与一根连杆活动连接,所述连杆的另一端则与曲轴的中部活动连接,所述曲轴的两端通过轴承安装在壳体上,两根曲轴上各固定安装有一个齿轮,两个齿轮互相啮合,其中一根曲轴的端部与电机轴之间通过行星齿轮组传动连接;所述位移传感器、控制单元和电机三者之间电连接,位移传感器用于监测顶杆的移动距离并将数据传输至控制单元,控制单元根据接收到的数据来控制电机正转、停止或反转;当电机正转时,两根曲轴同步转动,进而通过两个连杆带动两个滑块在主缸推杆的轴向滑槽内向下移动,当滑块移动到轴向滑槽下端的限位凸台时,便会给整个主缸推杆施加一个轴向的下压力,主缸推杆进而将下压力向主缸活塞传递;当电机反转时,两根曲轴同步转动,进而通过两个连杆带动两个滑块在主缸推杆的轴向滑槽内向上移动,主缸推杆在回位弹簧的作用下也会向上移动。
3、上述技术方案具有两种制动模式,正常情况下为电动制动模式,当驾驶员踩压踏板模拟器时,踏板模拟器的顶杆会向下移动但不会直接将力传递给主缸,是通过位移传感器来监测顶杆的移动距离并将数据传输至控制单元,控制单元根据位置传感器监测到的顶杆踩踏深度来判断驾驶员对刹车制动力的需求,进而控制电机的转动圈数,并依次通过行星齿轮、曲柄、连杆、滑块、主缸推杆传动实现对主缸活塞提供压力使其向后运动,从而使主缸建压输出,其中顶杆位移对应的主缸输出压力通过电机解耦实现可调。在主缸建压过程中,主缸的液压传感器可实时监控主缸的输出压力并反馈至控制单元,从而形成闭环控制。另一种模式为机械冗余模式,作为电机失效时的替代方案,即踏板推动顶杆向下运动一段距离后并继续推动主缸推杆向下移动,继而推动主缸活塞向下运动解压输出,实现制动。
4、在一个实施例中,所述位移传感器安装在壳体上,所述顶杆的中部安装有与位移传感器相配合的磁铁以及磁铁安装支架,位移传感器根据磁通量来检测顶杆的移动距离。
5、在一个实施例中,所述电动助力机构还包括电机凸爪、弹性联轴器和曲轴凸爪,电机凸爪通过过盈压装于行星齿轮组上,行星齿轮组过盈压装于电机上,电机与壳体通过螺栓固定连接,曲轴凸爪过盈压装在一根曲轴的端部,电机凸爪与曲轴凸爪之间过盈安装有一个弹性联轴器。
6、在一个实施例中,所述主缸推杆的筒状部内设有顶杆缓冲橡胶,所述主缸活塞内设有推杆缓冲软胶。
7、在一个实施例中,所述踏板模拟器还包括踏板弹簧挡圈、第一弹簧、第二弹簧、踏板弹簧座、安装座缓冲橡胶,踏板弹簧挡圈压装在推杆上,第一弹簧安装在踏板弹簧座与踏板弹簧挡圈之间,顶杆连接头上端与推杆活动连接,顶杆的中部设有一圈与顶杆一体成型的限位凸台,顶杆的上端穿过踏板安装座的轴孔后与顶杆连接头螺纹连接;第二弹簧安装于踏板弹簧座和踏板安装座之间;磁铁安装支架过盈安装在顶杆的限位凸台下方,磁铁通过螺栓固定在磁铁安装支架上,踏板安装座通过螺栓与壳体固定连接。通过设置第一弹簧和第二弹簧,能满足可变刚度的踏板感需求。
8、在一个实施例中,所述连杆的一端活动连接在曲轴中间部位,连杆与曲轴之间安装有衬套用以做自润滑,连杆的另一端通过固定销连接滑块,曲轴左侧端压装轴承,右侧端依次压装齿轮和轴承,其中一根曲轴的右侧端安装有曲轴凸爪,将压装好的曲轴分总成安装于壳体中,再通过螺栓将后盖锁紧在壳体上。
9、本发明的有益效果是:1)通过踏板模拟器、主缸分总成、位移传感器、控制单元和电动助力机构之间的配合,将电动助力制动和机械制动两种模式完美地结合在一起,确保制动的可靠性;2)将本发明的控制单元直接与行车电脑(ecu)电连接,则可由行车电脑(ecu)根据路况判断后直接控制刹车系统,从而实现主动刹车。
技术特征:1.一种线控制动装置,其特征在于:包括踏板模拟器、壳体(9)、后盖(11)、主缸分总成(45)、位移传感器(21)、控制单元和电动助力机构,所述踏板模拟器包括推杆(3)、顶杆连接头(6)、顶杆(7)、踏板安装座(18),所述主缸分总成(45)包括主缸缸体(45c)、主缸活塞(45e)、回位弹簧(41)、主缸推杆(40)、液压传感器(45d);所述壳体(9)的一端与踏板安装座(18)相连,另一端与主缸缸体(45c)相连;所述主缸推杆(40)包括筒状部和杆状部,杆状部的下端过盈安装有延伸杆(42),杆状部和延伸杆(42)插装于主缸活塞(45e)内,所述顶杆(7)的下端插入在主缸推杆(40)的筒状部内,主缸推杆(40)的筒状部外周面设有两个对称的轴向滑槽,在轴向滑槽的下端设有限位凸台;所述电动助力机构包括电机(12)、行星齿轮组(23)、两个齿轮(30)、两根曲轴(31)、两根连杆(34)和两个滑块(38),两个滑块(38)分别活动安装在主缸推杆(40)的筒状部的轴向滑槽内,两个滑块(38)的外侧端各与一根连杆(34)活动连接,所述连杆(34)的另一端则与曲轴(31)的中部活动连接,所述曲轴(31)的两端通过轴承(29)安装在壳体(9)上,两根曲轴(31)上各固定安装有一个齿轮(30),两个齿轮(30)互相啮合,其中一根曲轴(31)的端部与电机轴之间通过行星齿轮组(23)传动连接;所述位移传感器(21)、控制单元和电机(12)三者之间电连接,位移传感器(21)用于监测顶杆(7)的移动距离并将数据传输至控制单元,控制单元根据接收到的数据来控制电机(12)正转、停止或反转;当电机(12)正转时,两根曲轴(31)同步转动,进而通过两个连杆(34)带动两个滑块(38)在主缸推杆(40)的轴向滑槽内向下移动,当滑块(38)移动到轴向滑槽下端的限位凸台时,便会给整个主缸推杆(40)施加一个轴向的下压力,主缸推杆(40)进而将下压力向主缸活塞(45e)传递;当电机(12)反转时,两根曲轴(31)同步转动,进而通过两个连杆(34)带动两个滑块(38)在主缸推杆(40)的轴向滑槽内向上移动,主缸推杆(40)在回位弹簧(41)的作用下也会向上移动。
2.根据权利要求1所述的线控制动装置结构,其特征在于:所述位移传感器(21)安装在壳体(9)上,所述顶杆(7)的中部安装有与位移传感器(21)相配合的磁铁(20)以及磁铁安装支架(19),位移传感器(21)根据磁通量来检测顶杆(7)的移动距离。
3.根据权利要求1或2所述的线控制动装置结构,其特征在于:所述电动助力机构还包括电机凸爪24、弹性联轴器(25)和曲轴凸爪(26),电机凸爪24通过过盈压装于行星齿轮组(23)上,行星齿轮组(23)过盈压装于电机(12)上,电机(12)与壳体(9)通过螺栓固定连接,曲轴凸爪(26)过盈压装在一根曲轴(31)的端部,电机凸爪24与曲轴凸爪(26)之间过盈安装有一个弹性联轴器(25)。
4.根据权利要求1或2所述的线控制动装置结构,其特征在于:所述主缸推杆(40)的筒状部内设有顶杆缓冲橡胶(39),所述主缸活塞(45e)内设有推杆缓冲软胶(43)。
5.根据权利要求2所述的线控制动装置结构,其特征在于:所述踏板模拟器还包括踏板弹簧挡圈(4)、第一弹簧(5)、第二弹簧(13)、踏板弹簧座(8)、安装座缓冲橡胶(14),踏板弹簧挡圈(4)压装在推杆(3)上,第一弹簧(5)安装在踏板弹簧座(8)与踏板弹簧挡圈(4)之间,顶杆连接头(6)上端与推杆(3)活动连接,顶杆(7)的中部设有一圈与顶杆(7)一体成型的限位凸台,顶杆(7)的上端穿过踏板安装座(18)的轴孔后与顶杆连接头(6)螺纹连接;第二弹簧(13)安装于踏板弹簧座(8)和踏板安装座(18)之间;磁铁安装支架(19)过盈安装在顶杆(7)的限位凸台下方,磁铁(20)通过螺栓固定在磁铁安装支架(19)上,踏板安装座(18)通过螺栓与壳体(9)固定连接。
6.根据权利要求3所述的线控制动装置结构,其特征在于:所述连杆(34)的一端活动连接在曲轴(31)中间部位,连杆(34)与曲轴(31)之间安装有衬套(35)用以做自润滑,连杆(34)的另一端通过固定销(36)连接滑块(38),曲轴(31)左侧端压装轴承(29),右侧端依次压装齿轮(30)和轴承(29),其中一根曲轴(31)的右侧端安装有曲轴凸爪(26),将压装好的曲轴(31)分总成安装于壳体(9)中,再通过螺栓将后盖(11)锁紧在壳体(9)上。
技术总结本发明提供了一种线控制动装置,包括踏板模拟器、壳体、主缸分总成、位移传感器、控制单元和电动助力机构,踏板模拟器包括顶杆和踏板安装座;主缸分总成包括主缸缸体、主缸活塞、回位弹簧、主缸推杆;壳体一端与踏板安装座相连,另一端与主缸缸体连接,顶杆的下端插入在主缸推杆的筒状部内,筒状部外周设有对称的轴向滑槽和限位凸台,主缸推杆的杆状部插入主缸活塞;电动助力机构包括互相传动的电机、行星齿轮组和曲轴连杆滑块结构,滑块在主缸推杆的滑槽内活动,分别与连杆相连,连杆另一端与曲轴活动连接,位移传感器监测顶杆移动并将数据传递给控制单元,控制单元控制电机的转动或停止,进而通过曲轴连杆滑块结构作用于主缸推杆实现制动。
技术研发人员:胡亮,董仁泽,刘行
受保护的技术使用者:湖南腾智机电有限责任公司
技术研发日:技术公布日:2024/9/12