针对交通弱势参与群体的碰撞风险预警方法与流程
本发明涉及车辆智能辅助驾驶,尤其涉及一种针对交通弱势参与群体的碰撞风险预警方法。
背景技术:
1、由于商用车和客车其车身结构复杂庞大,视觉盲区更大,容易给周围行人和骑行者(相对于具有较大质量的上述车型,可将步行者及骑行者称为交通弱势参与群体,而随着交通方式的多样化发展,本发明可以不仅限于针对行人和骑行人)带来安全风险。交通弱势参与群体(本发明简称为交通弱势参与者)的检测系统是用于检测车辆前方和侧方行人或骑行者等目标的信息,通过视觉、声音等手段提醒驾驶员注意碰撞风险,以保护交通弱势参与群体。
2、现有的弱势群体检测系统主要通过毫米波雷达在既定探测角度范围进行感知(视场角fov>140°),例如在车前配置三颗毫米波雷达,车侧通过两颗毫米波雷达,以此方案实现前方与侧方针对交通弱势参与群体的目标感知,前方雷达组与侧方雷达组分别进行感知预警,侧方两个雷达系统,分别进行前方预警和侧方预警。
3、而目前的毫米波雷达方案经实际验证发现,并不容易区分交通弱势参与群体目标以及其他动静态目标,极易导致误报;此外,现有的检测系统装置需配置一定数量的毫米波雷达,导致设计复杂且成本较高。
技术实现思路
1、鉴于上述,本发明旨在提供一种针对交通弱势参与群体的碰撞风险预警方法,以解决前述提及的技术问题。
2、本发明采用的技术方案如下:
3、本发明提供了一种针对交通弱势参与群体的碰撞风险预警方法,其中,在车头正前方处设置第一鱼眼摄像头,在与驾驶员不同侧的车头侧方处设置第二鱼眼摄像头,两个鱼眼摄像头的视野角均大于180°,并执行下述控制逻辑:
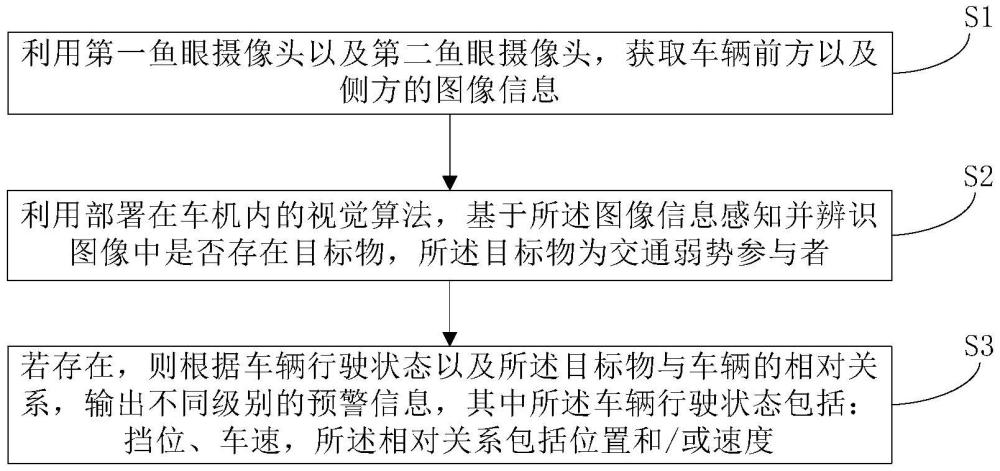
4、利用第一鱼眼摄像头以及第二鱼眼摄像头,获取车辆前方以及侧方的图像信息;
5、利用部署在车机内的视觉算法,基于所述图像信息感知并辨识图像中是否存在目标物,所述目标物为交通弱势参与者;
6、若存在,则根据车辆行驶状态以及所述目标物与车辆的相对关系,输出不同级别的预警信息,其中所述车辆行驶状态包括:挡位、车速,所述相对关系包括位置和/或速度。
7、在其中至少一种可能的实现方式中,若目标物位于车辆前方的设定区域内、且挡位处于d挡或n挡、且车速小于预设的车速最高限值,则输出第一预警信号。
8、在其中至少一种可能的实现方式中,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下制动踏板,则同步输出第二预警信号。
9、在其中至少一种可能的实现方式中,若目标物位于车辆前方的设定区域内、且挡位处于d挡或n挡、且车速小于预设的车速最高限值、且目标物具有大于预设的第二速度设定值的横向速度,则输出第一预警信号。
10、在其中至少一种可能的实现方式中,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下制动踏板,则同步输出第二预警信号。
11、在其中至少一种可能的实现方式中,若目标物在车辆侧方的设定区域内与车辆同向行进且具有大于预设的第三速度设定值的纵向速度、且挡位处于d挡或n挡、且车速小于预设的车速最高限值,则输出第一预警信号。
12、在其中至少一种可能的实现方式中,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下踏板、且同侧转向灯开启或方向盘角度指示方向盘向同侧转动,则同步输出第二预警信号。
13、与现有技术相比,本发明的主要设计构思在于,通过在车头的正前方以及盲区一侧配置两颗视野大于180°的鱼眼摄像头全面覆盖车辆前方、侧方的影像,再配合视觉感知与识别技术准确分别是否存在交通弱势参与群体,之后结合车辆速度、挡位,以及目标与车辆的相对关系,对多种不同的风险工况进行预警输出,并且优选可以采用分级预警机制,实现针对复杂多变的交通情景精细化地提醒驾驶员避险,由此在兼顾较低成本的同时大大降低对非交通弱势参与群体目标的误识别,进而提升交通安全性。
技术特征:
1.一种针对交通弱势参与群体的碰撞风险预警方法,其特征在于,在车头正前方处设置第一鱼眼摄像头,在与驾驶员不同侧的车头侧方处设置第二鱼眼摄像头,两个鱼眼摄像头的视野角均大于180°,并执行下述控制逻辑:
2.根据权利要求1所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若目标物位于车辆前方的设定区域内、且挡位处于d挡或n挡、且车速小于预设的车速最高限值,则输出第一预警信号。
3.根据权利要求2所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下制动踏板,则同步输出第二预警信号。
4.根据权利要求1所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若目标物位于车辆前方的设定区域内、且挡位处于d挡或n挡、且车速小于预设的车速最高限值、且目标物具有大于预设的第二速度设定值的横向速度,则输出第一预警信号。
5.根据权利要求4所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下制动踏板,则同步输出第二预警信号。
6.根据权利要求1所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若目标物在车辆侧方的设定区域内与车辆同向行进且具有大于预设的第三速度设定值的纵向速度、且挡位处于d挡或n挡、且车速小于预设的车速最高限值,则输出第一预警信号。
7.根据权利要求6所述的针对交通弱势参与群体的碰撞风险预警方法,其特征在于,若在输出第一预警信号后,检测到车速大于预设的第一速度设定值、且驾驶者未踩下踏板、且同侧转向灯开启或方向盘角度指示方向盘向同侧转动,则同步输出第二预警信号。
技术总结
本发明公开了一种针对交通弱势参与群体的碰撞风险预警方法,本发明的主要设计构思在于,通过在车头的正前方以及盲区一侧配置两颗视野大于180°的鱼眼摄像头全面覆盖车辆前方、侧方的影像,再配合视觉感知与识别技术准确分别是否存在交通弱势参与群体,之后结合车辆速度、挡位,以及目标与车辆的相对关系,对多种不同的风险工况进行预警输出,并且优选可以采用分级预警机制,实现针对复杂多变的交通情景精细化地提醒驾驶员避险,由此在兼顾较低成本的同时大大降低对非交通弱势参与群体目标的误识别,进而提升交通安全性。
技术研发人员:卞伟,夏文娟,何少斌,丁富强,叶焱炀,王青松
受保护的技术使用者:安徽江淮汽车集团股份有限公司
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!