一种基于旋转过程受压作用的被动变形轮
本发明涉及轮式移动机器人领域,尤其涉及一种基于旋转过程受压作用的被动变形轮。
背景技术:
1、随着机器人技术的不断发展,适应复杂地形的移动机器人受到广泛关注。传统移动机器人如轮式、履带式和轮履结合式等各有优势,但在应对不同地形时往往存在局限性。例如,轮式结构在平坦地面上表现优异,但在复杂地形上往往受限,难以实现有效的越障能力;履带式结构尽管地形适应性强,越障能力突出,但其速度较慢,能耗高,难以满足快速移动需求。这些问题使得研究适应多样地形需求的轮式移动机器人成为关键。
2、模块化设计理念在移动机器人中的应用逐渐成为一种有效的解决方案。模块化设计的核心思想是将复杂系统拆分为多个相对独立、可替换的功能模块,通过模块间的组合或更替来实现系统功能的扩展和优化。在移动机器人中,模块化设计不仅可以提升结构的灵活性,还能够提高系统的维护性和适应性。
3、针对传统轮式机器人的不足,本专利提出了一种基于旋转过程中受压作用的被动变形轮。这种设计结合了模块化的思想,通过多个可独立运行的变形轮腿机构的组合,使其能够在不同地形条件下自主调节,从而显著提升了地形适应能力和运动效率。
技术实现思路
1、为提高轮式移动机器人在复杂地形中的越障能力,本发明提出一种基于旋转过程受压作用的被动变形轮。
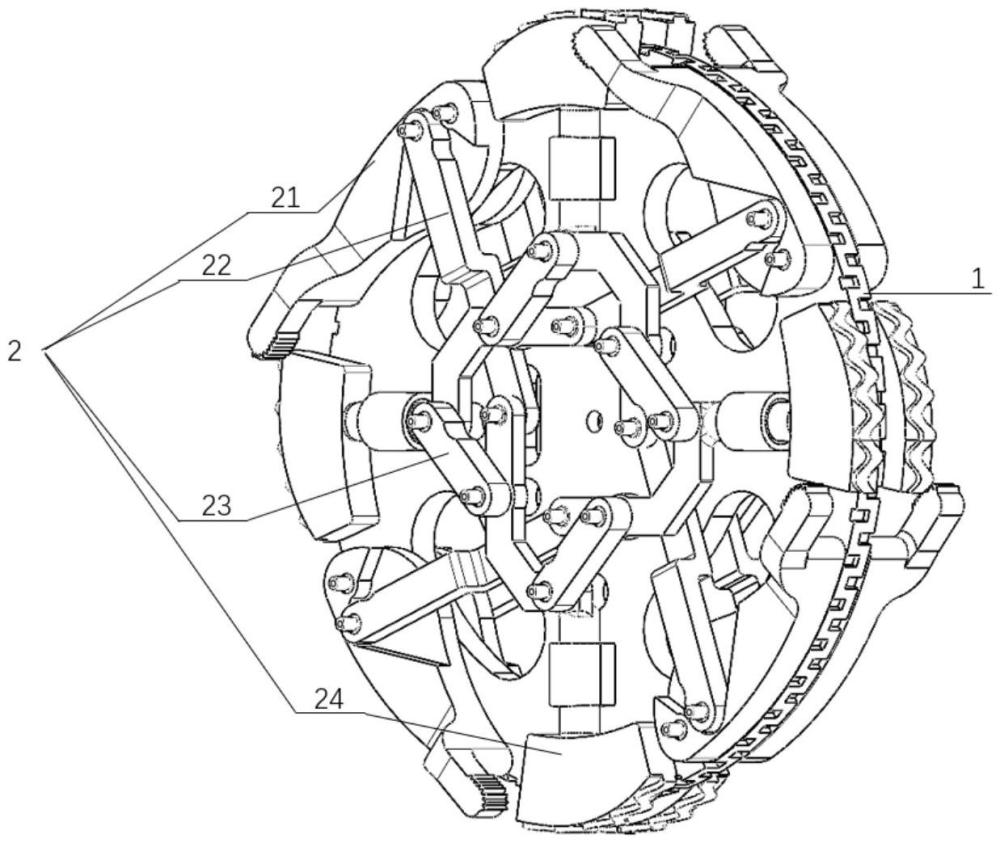
2、根据本发明的一种基于旋转过程受压作用的被动变形轮,所述被动变形轮包括以下结构:轮身,四组连杆组成的可变形轮腿机构以及置于轮身中间的自适应适配轴机构。
3、本发明所述可变形轮腿机构包括变形轮腿,中间连杆,回复连杆和受压轮腿。
4、本发明所述自适应适配轴机构包括固定部件、弹性卡扣和旋转部件。
5、本发明的有益效果是:本发明的有益效果在于提出一种基于旋转过程受压作用的被动变形轮。当轮子受到地面支撑力时,通过连杆机构使变形轮腿能够自动伸展和收缩,从而实现轮式形态和轮腿形态的无缝切换。这一设计显著提升轮子在不同地面条件下的适应能力。采用被动变形和回复的设计理念,减少了与地面接触时的阻力和能量损耗,提高了运行效率和能效。
6、通过在轮身上设计中间连杆限位孔和受压轮腿限位孔,不仅可以将受压轮腿传递的直线运动有效转换为变形轮腿的曲线运动,还能限制受压轮腿仅进行线性往复运动,从而确保轮腿受力的稳定性。
7、本专利设计的四组连杆组成的可变形轮腿机构结构稳定可靠。通过在轮身主体两侧设置不同数量的可变行轮腿机构组,实现模块化设计。这种结构不仅提升移动机器人整体稳定性,还有效降低维护成本和故障率,增强了移动机器人的越障能力。
8、本专利设计的轮身中心的自适应适配轴机构可适配如圆轴、d型轴等多种类型以及不同轴径的轴体,增强了轮子的通用性和适用性。
技术特征:
1.一种基于旋转过程受压作用的被动变形轮,其特征在于:包括轮身(1)、四组连杆组成的可变形轮腿机构(2)以及在轮身中间的自适应适配轴机构(3)。所述轮身(1)包括轮身主体(11)、中间连杆限位孔(12)、受压轮腿限位孔(13)。所述可变形轮腿机构(2)包括变形轮腿(21)、中间连杆(22)、回复连杆(23)和受压轮腿(24)。
2.根据权利要求1所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:所述轮身主体(11)提供对四组连杆组成可变形轮腿机构(2)的支撑和结构强度;所述中间连杆限位孔(12)将受压轮腿(24)传递的直线运动转换为变形轮腿的曲线运动;所述受压轮腿限位孔(13)限制受压轮腿(24)仅能做线性往复运动。
3.根据权利要求1所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:所述变形轮腿(21)、中间连杆(22)、回复连杆(23)和受压轮腿(24)构成一组机构,设置四组并沿轮周均匀分布。此外,可根据需求设置四组、六组、八组或其他数量的可变形轮腿机构,且沿轮周均匀排布。在轮身主体两侧可设置多组数量不同的可变行轮腿机构,以此构成模块化机构。
4.根据权利要求1所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:所述固定部件(31)安装在轮身主体(11)的背面,弹性调节部件(32)由弹性卡扣制成,旋转部件(33)通过与固定部件(31)的螺纹配合进行调节;所述自适应适配轴机构(3)能够适配不同类型的轴,包括圆轴、d型轴,以及不同轴径的轴体,确保多种轴型的兼容性。
5.根据权利要求3所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:所述变形轮腿(21)、中间连杆(22)、回复连杆(23)和受压轮腿(24)通过台阶螺栓连接,便于组装和维护。环形阵列设计确保变形轮在各个方向上均具备一致的变形能力。
6.根据权利要求3所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:在变形轮运动过程中,当a组受压轮腿(24a)接触地面并受到地面向上的支撑力时,受压轮腿(24a)相对轮身向上运动,受压轮腿(24a)通过回复连杆(23a)推动中间连杆(22a),使相邻的b组可变形轮腿机构的变形轮腿(21b)绕固定轴旋转张开,同时a组的变形轮腿(21a)绕固定轴旋转收缩。其中,术语"a"、"b"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"a"、"b"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。
7.根据权利要求3所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:所述变形轮腿(21)在限位槽的限制下,其向外伸展的最大角度为40-60度。在此角度区间内,变形轮腿(21)能够更好地抓牢崎岖地面,因为该角度使轮腿的接触面与地面形成更大摩擦,提供更稳定的抓地效果。
8.根据权利要求4所述的一种基于旋转过程受压作用的被动变形轮,其特征在于:固定部件(31)安装在轮身(1)的背面,弹性调节部件(32)固定在固定部件(31)内,旋转部件(33)与固定部件(31)通过螺纹配合连接;通过转动旋转部件(33),在螺纹配合作用下,弹性卡扣部件(32)受压收缩,进而压紧内部安装的轴体,从而实现自适应适配轴机构对不同轴径的固定。
技术总结
传统轮式移动机器人在面对如山地、杂草等复杂地形时,往往表现出移动能力不足、越障能力有限等问题。本发明通过设计一种基于旋转过程受压作用的被动变形轮,有效解决这些问题。变形轮包括轮身、可变形轮腿机构以及自适应适配轴机构。本技术方案的优势在于其被动变形的特性,即轮子在旋转时能够因受压作用而发生被动变形,从而显著提高其越障能力,适应多种复杂地形的需求。与采用主动控制的复杂机械系统不同,被动变形轮无需额外的传感器和控制系统,显著降低了系统的复杂性和故障风险。本发明的创新点主要体现在:轮体在受压时能够被动变形,变形机构实现模块化设计,轮心的适配轴机构能够自适应不同轴径的轴体。
技术研发人员:郄龙飞,余炯东,王宇楠,林涛,张俊伟,王瑞雪,马秀清
受保护的技术使用者:北京化工大学
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!