用于智能驾驶车辆的减速控制方法、装置、设备及介质与流程
本申请涉及智能驾驶,具体涉及一种用于智能驾驶车辆的减速控制方法、装置、设备及介质。
背景技术:
1、随着智能驾驶技术的不断发展,提高车辆行驶的安全性与舒适性成为了业界关注的重点。在日常驾驶中,减速带作为一种常见的道路设施被广泛应用于学校、住宅区等需要限制车速的地方,用以强制降低过往车辆的速度,从而减少交通事故的发生率。然而,传统上驾驶员对于减速带的反应依赖于视觉观察或是预先对路线的了解,这种处理方式存在一定的局限性和不确定性。
2、当车辆高速通过减速带时,不仅会对车内乘客造成不适感,还可能因为剧烈的震动导致车辆悬挂系统或轮胎等部件受到损害。此外,在某些情况下,由于视线受阻等原因未能及时发现减速带,未能在指令通过减速带时进行适当的减速,从而导致因快速通过减速带会产生强烈的震动感,严重影响乘客的乘坐体验,甚至影响驾驶员因突如其来的颠簸而失去对方向盘的控制,进而导致其他安全事故。
技术实现思路
1、鉴于以上所述现有技术的缺点,本申请提供一种用于智能驾驶车辆的减速控制方法、装置、设备及介质,以解决上述技术问题。
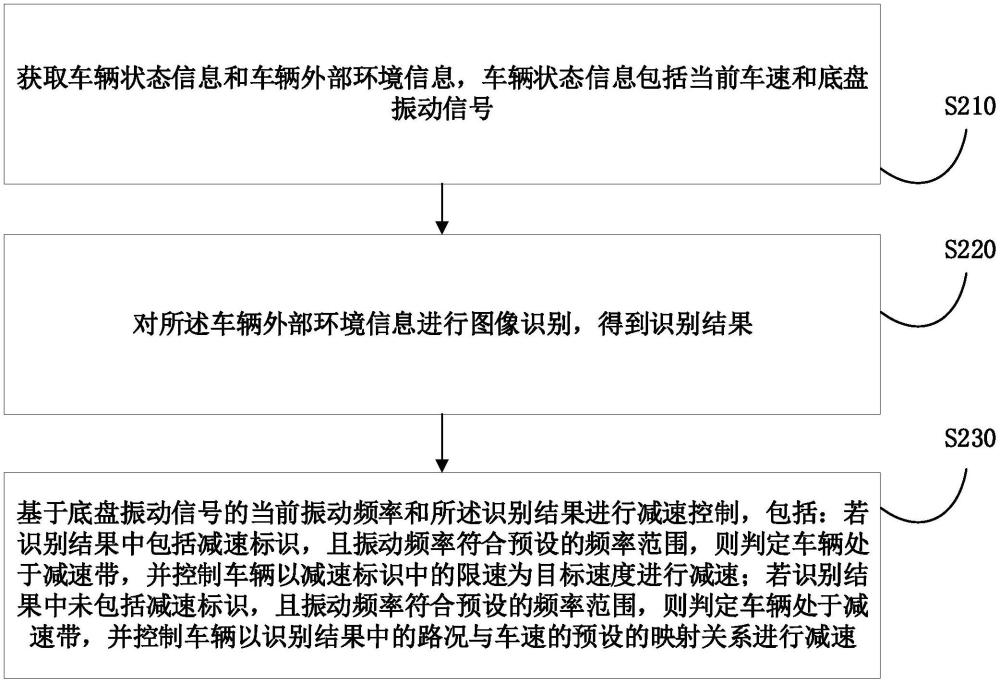
2、本申请提供一种用于智能驾驶车辆的减速控制方法,所述方法包括:获取车辆状态信息和车辆外部环境信息,所述车辆状态信息包括当前车速和底盘振动信号;对所述车辆外部环境信息进行图像识别,得到识别结果;基于所述底盘振动信号的当前振动频率和所述识别结果,进行减速控制,所述减速控制包括:若识别结果中包括减速标识,且振动频率符合预设的频率范围,则判定车辆处于减速带,并控制车辆以减速标识中的限速为目标速度进行减速;若识别结果中未包括减速标识,且振动频率符合预设的频率范围,则判定车辆处于减速带,并控制车辆以识别结果中的路况与车速的预设的映射关系进行减速。
3、于本申请的一个实施例中,判断车辆是否处于减速带,包括:根据所述底盘振动信号确定车辆开始振动的初始振动时刻,并基于所述车辆状态信息得到所述初始振动时刻对应的初始车速;基于预设的频速映射关系和所述初始车速,得到所述初始车速所对应的标准振动频率范围,所述频速映射关系用于表征振动频率和初始车速时间的对应关系;比较所述当前振动频率和所述标准振动频率范围,若所述当前振动频率在所述标准振动频率范围内,则判定车辆通行路段存在减速带;若所述当前振动频率在所述标准振动频率范围外,则判定车辆通行路段不存在减速带。
4、于本申请的一个实施例中,控制车辆进行减速之前,所述方法还包括:基于车辆的外部环境信息确定减速后的目标信息,所述目标信息包括目标车速和目标减速位置;其中,当识别结果中包括减速标识,将所述减速标识中的限速信息确定为目标车速,并将所述减速标识所处的位置确定为目标减速位置;当识别结果中未包括减速标识,基于预设的路况限速映射关系,得到与所述当前路况相对应的限速信息;将所述限速信息中的限速位置确定为目标减速位置,并将所述限速信息中的限制速度确定为目标车速。
5、于本申请的一个实施例中,基于车辆的外部环境信息确定减速后的目标信息之后,还包括:获取车辆的当前定位信息,以基于所述当前定位信息确定车辆的当前位置;计算所述当前位置和所述目标减速位置之间的距离得到车辆的减速距离,计算所述当前车速和所述目标车速的差值得到车辆的速度变化量;根据所述减速距离和所述速度变化量,计算得到车辆的目标减速度。
6、于本申请的一个实施例中,根据所述减速距离和所述速度变化量计算得到车辆的目标减速度,包括:根据所述驾驶信息确定所述待控制车辆通过每一减速标线的第一速度差和通行时长,并根据所述第一速度差和所述通行时长计算得到标线减速度;计算所述目标减速度和所述标线减速度的差值,并将所述差值确定为必要减速度,以基于所述必要减速度控制车辆进行减速驾驶,所述必要减速度为车辆动能系统所需要提供的减速度。
7、于本申请的一个实施例中,基于所述必要减速度控制车辆进行减速驾驶,包括:基于所述必要减速度生成减速控制指令;将所述减速控制指令发送至待控制车辆的智能驾驶计算平台,以触发所述智能驾驶计算平台基于待控制车辆的目标减速度和车辆配置参数计算车辆制动力,所述车辆配置参数用于表征车辆制动力与减速度之间的关系;基于所述车辆制动力对所述待控制车辆的速度进行控制,直至所述待控制车辆减速至所述目标车速。
8、于本申请的一个实施例中,基于所述必要减速度控制车辆进行减速驾驶之后,还包括:获取用户反馈信息,所述用户反馈信息至少包括车辆是否处于减速带的判定结果准确性;若所述判定结果准确性低于预设准确性阈值,则重新采集测试数据,并基于新的测试数据更新所述频速映射关系。
9、本申请提供一种用于智能驾驶车辆的减速控制装置,所述装置包括:数据采集模块,用于获取车辆状态信息和车辆外部环境信息,所述车辆状态信息包括当前车速和底盘振动信号;信息识别模块,用于对所述车辆外部环境信息进行图像识别,得到识别结果;减速控制模块,用于基于所述底盘振动信号的当前振动频率和所述识别结果,对车辆进行减速控制,所述减速控制包括:若识别结果中包括减速标识,且振动频率符合预设的频率范围,则判定车辆处于减速带,并控制车辆以减速标识中的限速为目标速度进行减速;若识别结果中未包括减速标识,且振动频率符合预设的频率范围,则判定车辆处于减速带,并控制车辆以识别结果中的路况与车速的预设的映射关系进行减速。
10、本申请提供一种电子设备,包括处理器、存储器和通信总线;所述通信总线用于将所述处理器和存储器连接;所述处理器用于执行所述存储器中存储的计算机程序,以实现如上所述的用于智能驾驶车辆的减速控制方法。
11、本申请提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序用于使计算机执行如上所述的用于智能驾驶车辆的减速控制方法。
12、本申请的有益效果:本申请中的用于智能驾驶车辆的减速控制方法,首先,收集待控制车辆的实时振动数据以及周围的道路状况,并基于这些数据,结合车辆的初始速度,判断出车辆是否已经处于设置了减速带的路段;一旦确认存在减速带,则进一步利用道路环境信息来确定目标减速位置和减速后的目标车速;随后,计算出从当前车速降至目标车速所需的减速度,并据此对车辆执行平稳减速操作。通过这种实时监测与快速响应机制,本方法能够精准识别减速带的位置,并及时采取适当的减速措施,从而有效预防了因高速通过减速带可能引发的一系列问题,包括但不限于车辆结构损伤、乘客受伤等安全风险。这种方法不仅提升了智能驾驶过程中的安全性,还增强了整体乘车体验。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种用于智能驾驶车辆的减速控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的用于智能驾驶车辆的减速控制方法,其特征在于,判断车辆是否处于减速带,包括:
3.根据权利要求1所述的用于智能驾驶车辆的减速控制方法,其特征在于,控制车辆进行减速之前,所述方法还包括:
4.根据权利要求3所述的用于智能驾驶车辆的减速控制方法,其特征在于,基于车辆的外部环境信息确定减速后的目标信息之后,还包括:
5.根据权利要求4所述的用于智能驾驶车辆的减速控制方法,其特征在于,根据所述减速距离和所述速度变化量计算得到车辆的目标减速度,包括:
6.根据权利要求5所述的用于智能驾驶车辆的减速控制方法,其特征在于,基于所述必要减速度控制车辆进行减速驾驶,包括:
7.根据权利要求2所述的用于智能驾驶车辆的减速控制方法,其特征在于,基于所述必要减速度控制车辆进行减速驾驶之后,还包括:
8.一种用于智能驾驶车辆的减速控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括处理器、存储器和通信总线;所述通信总线用于将所述处理器和存储器连接;所述处理器用于执行所述存储器中存储的计算机程序,以实现如权利要求1-7任一项所述的用于智能驾驶车辆的减速控制方法。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序用于使计算机执行如权利要求1-7任一项所述的用于智能驾驶车辆的减速控制方法。
技术总结
本申请提供一种用于智能驾驶车辆的减速控制方法、装置、设备及介质,该方法包括,获取车辆状态信息和车辆外部环境信息,对车辆外部环境信息进行图像识别得到识别结果,基于底盘振动信号的当前振动频率和识别结果,进行减速控制,具体包括,当振动频率符合预设的频率范围,则判定车辆处于减速带,若识别结果中包括减速标识,控制车辆以减速标识中的限速为目标速度进行减速,若识别结果中未包括减速标识,控制车辆以识别结果中的路况与车速的预设的映射关系进行减速;通过监测车辆的振动频率准确识别出车辆是否正在通过减速带,并在检测到减速带后立即采取相应的减速措施,以避免因车辆高速通过减速带而引发的潜在危险,提高了车辆的驾驶安全性。
技术研发人员:刘昆,张东辉,任全森,张静,黄志伟,陈吉祥
受保护的技术使用者:重庆赛力斯凤凰智创科技有限公司
技术研发日:
技术公布日:2024/12/17
- 还没有人留言评论。精彩留言会获得点赞!