方向盘离手误触发检测方法、系统、存储介质及智能汽车与流程
本发明涉及车辆检测,特别是一种方向盘离手误触发检测方法、系统、存储介质及智能汽车。
背景技术:
1、随着城市化进程的加快和汽车保有量的不断增加,汽车的自动行驶也越来越普遍。但是随着自动驾驶的发展,安全问题也随之而来。根据法规,自动驾驶的时候,人手不能离开方向盘。
2、目前市面上的方向盘离手检测,大多是通过设定电容阈值判断人手是否触摸方向盘,当手触摸到方向盘上的传感器时,传感器感应到电容信号值的增加或减少和未触摸时的平均电容信号量进行比较,进而可以确定是否有手触摸。但是不同的人会有不同的手指电容,而且触摸方向盘所覆盖的手掌面积、用力大小都会导致传感器接收到的电容信号大小不一样。如果将阈值设置的偏小,则会导致当手掌还未接触到方向盘时就会检测为触摸;而如果将阈值设置的偏大,则有可能会导致当手掌全部触摸到了方向盘却还是判断为未触摸。如果单纯的设定一个触摸阈值,则会导致存在误触的风险,而且识别的手势也不准确。
3、因此,设计一种能够有效防止离手误触发的方向盘离手误触发检测方法、系统、存储介质及智能汽车,对本领域技术人员来说是至关重要的。
技术实现思路
1、本发明实施例要解决的技术问题在于,提供一种能够有效防止离手误触发的方向盘离手误触发检测方法、系统、存储介质及智能汽车,以解决现有技术中存在误触风险,而且识别手势不准确的问题。
2、本发明公开了一种方向盘离手误触发检测方法,其方案在于,包括以下步骤:
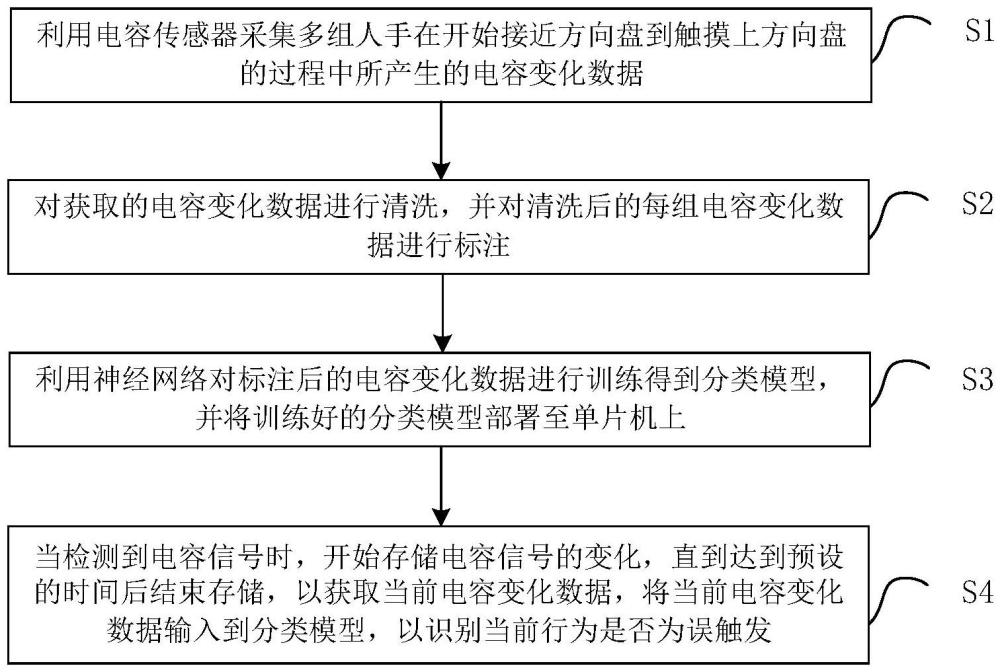
3、利用电容传感器采集多组人手在开始接近方向盘到触摸上方向盘的过程中所产生的电容变化数据;
4、对获取的电容变化数据进行清洗,并对清洗后的每组电容变化数据进行标注;
5、利用神经网络对标注后的电容变化数据进行训练得到分类模型,并将训练好的分类模型部署至单片机上;
6、当检测到电容信号时,开始存储电容信号的变化,直到达到预设的时间后结束存储,以获取当前电容变化数据,将当前电容变化数据输入到分类模型,以识别当前行为是否为误触发。
7、可选地,所述“利用电容传感器采集多组人手在开始接近方向盘到触摸上方向盘的过程中所产生的电容变化数据”包括以下步骤:
8、在每一次人手开始接近方向盘到触摸上方向盘的过程中对应采集一组电容变化值,并以预设的采集间隔采集多组;
9、设置电容传感器的模式为互容模式,并根据预设的转换公式将每组电容变化值中的每一电容值转换为对应的电容数据,以形成对应的电容变化数据。
10、可选地,所述电容传感器在单cdac模式下的转换公式为:
11、
12、所述电容传感器在双cdac模式下的转换公式为:
13、
14、其中,
15、maxcount=nsub*txclkdiv
16、rawdata为触摸数据,maxcount为电容传感器所采集的最大触摸电容数据;nsub为电容传感器的子转换次数,txclkdiv为电容传感器的tx时钟分频率,cp为电容传感器的寄生电容值,cf为电容传感器所采集的手指电容值,cref为电容传感器的参考电容值,compclkdiv为电容传感器的补偿cdad分频率。
17、可选地,所述“对获取的电容变化数据进行清洗,并对清洗后的每组电容变化数据进行标注”包括以下步骤:
18、预设标注规则,“1”为误触摸,“0”为未误触摸;
19、通过数字滤波器将电容变化数据中的无效数据和异常数据滤除;
20、对清洗后的每组电容变化数据根据预设的标注规则进行标注,以形成标签集。
21、可选地,所述“利用神经网络对标注后的电容变化数据进行训练得到分类模型,并将训练好的分类模型部署至单片机上”包括以下步骤:
22、从所有电容变化数据中选取部分数据作为训练集,并将另一部分数据作为测试集;
23、在python中导入训练集和测试集,并加载训练集中的电容变化数据和对应标签集;
24、通过训练集中的电容变化数据和对应标签集对分类模型进行多轮训练,并将训练后的分类模型部署至单片机中。
25、可选地,所述分类模型为6层的全连接神经网络,其包括输入层、4层隐藏层以及输出层,所述输入层为128个节点,所述4层隐藏层分别为32、32、16、16个节点,所述输出层为2个节点,所述隐藏层通过relu函数进行激活,所述输出层通过sigmoid函数进行激活,其中,所述relu激活函数为:
26、relu(x)=max(0,x)
27、所述sigmoid激活函数为:
28、
29、所述全连接神经网络的损失函数为:
30、
31、可选地,所述“获取当前电容变化数据,将当前电容变化数据输入到分类模型,以识别当前行为是否为误触发”包括以下步骤:
32、将当前电容变化数据输入至分类模型中进行分类,选择概率结果最大的作为预测结果;
33、根据预测结果,若为误触发,则不作处理;若不是误触发,则继续判断当前是否为触摸,若是误触发,则不作处理,若不是误触发,则发出警告。
34、为解决现有技术存在的问题,本发明还提供一种方向盘离手误触发检测系统,其方案在于,包括:
35、数据采集模块,用于采集电容变化数据;
36、数据处理及标注模块,用于电容变化数据进行清洗和分类标注;
37、模型训练模块,用于使用标注后的电容变化数据对分类模型进行训练,并将训练后的分类模型部署至控制器中;
38、检测模块,用于采集当前电容变化数据,将当前电容变化数据输入至分类模型,以识别当前行为是否为误触发;
39、警示模块,用于在方向盘没有被触摸时发出警告。
40、为解决现有技术存在的问题,本发明还提供一种计算机可读的存储介质,其方案在于,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上任一项所述方法的步骤。
41、为解决现有技术存在的问题,本发明还提供一种智能汽车,其方案在于,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上任一项所述方法的步骤。
42、与现有技术相比,本发明实施例提供的方向盘离手误触发检测方法的有益效果在于:通过采集大量不同人以不同角度、不同触摸方式下从接近方向盘到触摸上方向盘的过程中所产生的电容变化数据,并利用神经网络将大量电容变化数据进行训练以得到分类模型,并通过分类模型和当前电容变化数据来判断当前离手触发是否为误触发,并在非误触发时发出警示,该方案通过从接近方向盘到触摸上方向盘的过程中所产生的电容变化数据作为训练集进行模型训练,实现离手误触发的自动检测,不需要人为设定电容阈值,降低了人为操作带来的误差,减少了误判的风险,从而提高车辆行驶的安全性。
技术特征:
1.一种方向盘离手误触发检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方向盘离手误触发检测方法,其特征在于,所述“利用电容传感器采集多组人手在开始接近方向盘到触摸上方向盘的过程中所产生的电容变化数据”包括以下步骤:
3.根据权利要求2所述的方向盘离手误触发检测方法,其特征在于,所述电容传感器在单cdac模式下的转换公式为:
4.根据权利要求1所述的方向盘离手误触发检测方法,其特征在于,所述“对获取的电容变化数据进行清洗,并对清洗后的每组电容变化数据进行标注”包括以下步骤:
5.根据权利要求4所述的方向盘离手误触发检测方法,其特征在于,所述“利用神经网络对标注后的电容变化数据进行训练得到分类模型,并将训练好的分类模型部署至单片机上”包括以下步骤:
6.根据权利要求1所述的方向盘离手误触发检测方法,其特征在于,所述分类模型为6层的全连接神经网络,其包括输入层、4层隐藏层以及输出层,所述输入层为128个节点,所述4层隐藏层分别为32、32、16、16个节点,所述输出层为2个节点,所述隐藏层通过relu函数进行激活,所述输出层通过sigmoid函数进行激活,其中,所述relu激活函数为:
7.根据权利要求6所述的方向盘离手误触发检测方法,其特征在于,所述“获取当前电容变化数据,将当前电容变化数据输入到分类模型,以识别当前行为是否为误触发”包括以下步骤:
8.一种方向盘离手误触发检测系统,其特征在于,包括:
9.一种计算机可读的存储介质,其特征在于,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述方法的步骤。
10.一种智能汽车,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1-7任一项所述方法的步骤。
技术总结
本发明涉及涉及车辆检测技术领域,特别是一种方向盘离手误触发检测方法、系统、存储介质及智能汽车,包括利用电容传感器采集多组人手在开始接近方向盘到触摸上方向盘的过程中所产生的电容变化数据;对获取的电容变化数据进行清洗并标注;利用神经网络对标注后的电容变化数据进行训练得到分类模型并部署至单片机上;获取当前电容变化数据,并输入到分类模型以识别当前行为是否为误触发;该方案通过将大量不同人以不同角度、不同触摸方式下从接近方向盘到触摸上方向盘的过程中所产生的电容变化数据作为模型训练数据,以进行模型训练并实现自动检测,不需要人为设定电容阈值,降低人为操作带来的误差,减少误判风险,从而提高车辆行驶的安全性。
技术研发人员:夏立闯,杨九如,汪永祥,向稳燃
受保护的技术使用者:深圳市麦积电子科技有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!