一种田间全向移动底盘及其作业平台及地隙调节方法
本发明属于农业机械,具体涉及一种田间全向移动底盘及其作业平台及地隙调节方法。
背景技术:
1、为实现农业现代化,在推广智慧农业、农业智能装备自主化作业背景下,对于不同田间作业条件、不同作物、不同种植模式,往往对田间作业平台的灵活性、可调节性、拓展性、导航系统有较高要求;对于同一种作物,其株高往往也具有较大差异,例如红花株高范围在600-1500mm间变化,平均株高在900mm左右,采摘高度行程差异较大;对于不同作物垄高、行距,传统的作业平台存在转向灵活性低、作业高度适应性差问题。
2、目前,中国发明专利申请(申请号:201910020164.3)公开了一种四轮独立转向驱动的伸缩式田间作业机器人平台,其作业平台在宽度伸缩方面具有优势,但高度伸缩其平台跨度较大,稳定性有所降低,挂接、安装等拓展执行器功能有局限性。
3、目前,中国发明专利申请(申请号:201910811733.6)公开了田间全向移动作业平台,其作业平台高度固定,对于高杆作物或者株高差异化较大的作物,其适应性较差。
4、目前,中国发明专利申请(申请号:202210878351.7)公开了一种田间作业机器人地头转向导航系统及导航方法,其利用双目相机、卫星定位系统进行导航控制,对于田间复杂动态场景双目相机的视觉检测误差较大。
5、因此希望田间作业平台具有地隙可调节、作业平台可挂接、安装多种执行机构、轮毂灵活转向、精准导航的功能,从而为现代化农业提供技术支持,提高农业生产作业环节所用到装备的智能化水平。
技术实现思路
1、本发明的目的在于提供一种田间全向移动底盘及其作业平台及地隙调节方法,融合了北斗-激光雷达导航系统,四轮独立转向及行走组件的转向灵活性能更高,龙门式悬架车架和地隙调节方法适应垄式种植,针对高杆作物和多种作业任务,作业平台可以通过挂接、安装不同类型的执行部件,实现对田间作物的采收、打顶、修剪、喷洒药物等作业,以解决上述背景提出的问题。
2、为实现上述的目的,本发明提供如下的技术方案:一种田间全向移动底盘及其作业平台及地隙调节方法,包括作业平台、北斗-激光雷达导航系统、车架悬架、电控箱、独立转向及行走组件,所述作业平台连接着车架悬架,所述电控箱、北斗-激光雷达系统安装在车架悬架上,所述车架悬架与独立转向及行走组件相连接。
3、具体的,所述作业平台,包括顶板、平台框架、地隙调节机构等。
4、进一步的,所述顶板固接在所述平台框架中部,用于田间作业执行部件挂接或安装;所述地隙调节机构,包括支撑架、法兰、导轨、光轴、伺服电缸支架、伺服电缸;所述支撑架四角下部有固定角片,所述光轴对称连接在平台框架左右两侧,且每侧安装一对,所述导轨安装在所述支撑件对应所述光轴配合位置,所述光轴穿过所述导轨与其配合,实现对所述顶板直线升降运动导向作用,所述法兰安装在光轴安装位置中间,所述伺服电缸通过伺服电缸支架安装在所述支撑件上,且与所述安装法兰相连接,所述固定角片预留与车架悬架上角片固定座相连接,从而把作业平台与下方车架悬架相连接。
5、具体的,所述北斗-激光雷达导航系统,包括机载电脑、激光雷达模块、北斗模块、远程终端、5g工业路由器、工控机、四轮独立转向行走驱动模块、惯性测量单元。
6、进一步的,所述激光雷达模块、北斗模块分别通过串口与所述机载电脑连接,所述惯性测量单元通过工控机返回数据到机载电脑,所述远程终端通过所述5g工业路由器提供无线网络与机载电脑连接,所述机载电脑通过激光雷达模块、北斗模块获取信息并生成路径命令,进而通过工控机发送指令控制四轮独立转向行走驱动模块,北斗天线安装在所述车架悬架左右两侧,激光雷达安装在所述车架悬架前上方中部。
7、具体的,所述车架悬架包括矩形车架、悬架、轮毂安装板、悬架拓展支架、电控箱安装板。
8、进一步的,所述角片固定座安装在矩形车架上部四个角,且与所述作业平台中所述固定角片相连接;所述北斗天线安装支架安装在矩形车架左右两侧,所述悬架呈现为龙门式结构,包括矩形车架以及分布在两侧的两对梁柱,且左右两侧的上下位置均布置横梁,所述两对梁柱和横梁包括两侧的悬架左前梁柱、悬架右前梁柱、悬架左后梁柱、悬架右后梁柱、悬架左上横梁、悬架右上横梁、悬架左下横梁、悬架右下横梁;所述电控箱安装板安装在所述悬架右前梁柱的内侧,所述轮毂安装板安装在所述悬架左前梁柱、悬架右前梁柱、悬架左后梁柱、悬架右后梁柱的下部与独立转向及行走组件连接,所述车架悬架作为整机的框架不仅上面稳定的支撑着作业平台,而且向下连接着独立转向及行走组件。
9、具体的,所述独立转向及行走组件包括行走机构、转向机构;所述行走机构包括轮毂机架、实心胎、行星减速器a、行走伺服电机、轮毂转接轴、轴承、轴承盖板、挡泥板、罩壳a;所述转向机构包括转向连接板、行星减速器b、转向伺服电机、上支撑、光轴弹簧组件、直线轴承箱体式组件、下支撑、罩壳b。
10、进一步的,所述轮毂机架下方实心胎穿过轮毂转接轴固定,所述轮毂转接轴一侧通过行星减速器a连接行走伺服电机,且轮毂转接轴在安装轴承的另一侧盖上轴承盖板;所述实心胎上方挡泥板与轮毂机架上方中部相连接,所述轮毂机架上方通过转向连接板与行星减速器b相连接,所述行星减速器b连接转向伺服电机;所述轮毂机架后面一对直线轴承箱体式组件通过垫圈与下支撑连接,且上支撑通过两根光轴弹簧组件与直线轴承箱体式组件上端连接,所述上支撑通过轮毂安装板与车架悬架相连接,所述行走伺服电机、转向伺服电机分别覆盖罩壳a、罩壳b,用于防尘、防雨水、防止异物进入干涉或发生缠绕。
11、在上述方案的基础上,若田间作业需要较低的作业高度,可以提供可互换的车架悬架,以达到作业要求,此外该作业平台留有若干个拓展支架,可以为后续的加装、拓展等提供便利条件。
12、与现有技术相比,本发明的有益效果是:田间全向移动底盘及其作业平台搭载了北斗-激光雷达导航系统,可以应对复杂的田间条件实现精准导航和路径规划;独立转向及行走组件不仅可以四轮独立驱动,还可以四轮独立转向,提高了转向和运动灵活性;龙门式车架悬架和地隙调节方法更好适应垄式种植模式或者高杆作物的进地作业;针对多种作业任务,作业平台自身可以实现作业高度调节,还可以通过挂接、安装不同类型的执行部件,实现对田间作物的采收、打顶、修剪、喷洒药物等作业。
技术特征:
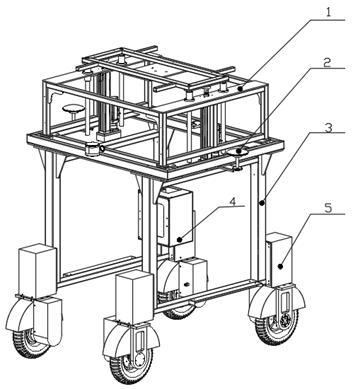
1.一种田间全向移动底盘及其作业平台及地隙调节方法,包括作业平台(1)、北斗-激光雷达导航系统(2)、车架悬架(3)、电控箱(4)、独立转向及行走组件(5);所述作业平台(1)安装在所述车架悬架(3)上方;所述电控箱(4)、北斗-激光雷达系统(2)安装在所述车架悬架(3)左右两侧;所述车架悬架(3)下部与所述独立转向及行走组件(5)相连接。
2.如权利要求1所述作业平台(1),包括顶板(101)、平台框架(102)、地隙调节机构(103)等;所述顶板(101)固接在所述平台框架(102)中部,用于田间作业执行部件挂接或安装;所述地隙调节机构(103),包括支撑架(10301)、法兰(10302)、导轨(10303)、光轴(10304)、伺服电缸支架(10305)、伺服电缸(10306);所述支撑架(10301)四角下部有固定角片(1030101);所述光轴(10304)对称连接在平台框架(102)左右两侧,且每侧安装一对;所述导轨(10303)安装在所述支撑件(10301)对应所述光轴(10304)配合位置,所述光轴(10304)穿过所述导轨(10303)与其配合,实现对所述顶板(101)直线升降运动导向作用;所述法兰(10302)安装在光轴(10304)安装位置中间,所述伺服电缸(10306)通过伺服电缸支架(10305)安装在所述支撑件10301上,且与所述安装法兰(10302)相连接。
3.如权利要求1所述北斗-激光雷达导航系统(2),包括机载电脑(201)、激光雷达模块(202)、北斗模块(203)、远程终端(204)、5g工业路由器(205)、工控机(206)、四轮独立转向行走驱动模块(207)、惯性测量单元(208);所述惯性测量单元(208)通过工控机(206)与机载电脑(201)进行数据传输;所述远程终端(204)通过所述5g工业路由器(205)与机载电脑(201)进行数据传输;所述机载电脑(201)通过工控机(206)与四轮独立转向行走驱动模块(207)进行数据传输;北斗天线(20301)安装在所述车架悬架(3)左右两侧,激光雷达(20201)安装在所述车架悬架(3)前上方中部。
4.如权利要求1所述车架悬架(3)包括矩形车架(301)、悬架(302)、轮毂安装板(303)、悬架拓展支架(304)、电控箱安装板(305);所述角片固定座(30102)安装在矩形车架(301)上部四个角,且与所述作业平台(1)中所述固定角片(1030101)相连接;所述北斗天线安装支架(30103)安装在矩形车架(301)左右两侧,所述悬架(302)包括悬架左前梁柱(30201a)、悬架右前梁柱(30201b)、悬架左后梁柱(30202a)、悬架右后梁柱(30202b)、悬架左上横梁(30203a)、悬架右上横梁(30203b)、悬架左下横梁(30204a)、悬架右下横梁(30204b);所述电控箱安装板(305)安装在所述悬架右前梁柱(30201b)内侧,所述轮毂安装板(303)安装在悬架左前梁柱(30201a)、悬架右前梁柱(30201b)、悬架左后梁柱(30202a)、悬架右后梁柱(30202b)的下部与独立转向及行走组件(5)连接。
5.如权利要求1所述独立转向及行走组件(5)包括行走机构(501)、转向机构(502);所述行走机构(501)包括轮毂机架(50101)、实心胎(50102)、行星减速器a(50103)、行走伺服电机(50104)、轮毂转接轴(50105)、轴承(50106)、轴承盖板(50107)、挡泥板(50108)、罩壳a(50109);所述转向机构(502)包括转向连接板(50201)、行星减速器b(50202)、转向伺服电机(50203)、上支撑(50204)、光轴弹簧组件(50205)、直线轴承箱体式组件(50206)、下支撑(50207)、罩壳b(50208)。
6.如权利要求5所述轮毂机架(50101)下方实心胎(50102)穿过轮毂转接轴(50105)固定,所述轮毂转接轴(50105)一侧通过行星减速器a(50103)连接行走伺服电机(50104),且轮毂转接轴(50105)在安装轴承(50106)的另一侧盖上轴承盖板(50107),所述实心胎(50102)上方挡泥板(50108)与轮毂机架(50101)上方中部相连接,所述轮毂机架(50101)上方通过转向连接板(50201)与行星减速器b(50202)相连接,所述行星减速器b(50202)连接转向伺服电机(50203),所述轮毂机架(50201)后面一对直线轴承箱体式组件(50206)通过垫圈与下支撑(50207)连接,且上支撑(50204)通过两根光轴弹簧组件(50205)与直线轴承箱体式组件(50206)上端连接,所述上支撑(50204)通过轮毂安装板(303)与车架悬架(3)相连接,所述行走伺服电机(50104)、转向伺服电机(50203)分别覆盖罩壳a(50109)、罩壳b(50208)。
7.根据权利要求1所述作业平台(1),其特征在于:由本发明提供的地隙调节方法进行地隙调节,具体为地隙调节机构(103)通过伺服电缸(10306)驱动,两侧光轴(10304)导向约束实现所述顶板(102)直线升降,从而实现作业平台地隙调节,具体实施方法为:
8.根据权利要求1、4所述的车架悬架(3),其特征在于:呈现为龙门式结构,包括矩形车架(301)以及分布在两侧的两对梁柱(30201、30202),且左右两侧的上下位置均布置横梁(30203、30204),所述两对梁柱(30201、30202)侧边均通过轮毂安装板(303)与独立转向及行走组件(5)连接。
技术总结
本发明涉及一种田间全向移动底盘及其作业平台及地隙调节方法,该田间全向移动底盘包括作业平台、北斗‑激光雷达导航系统、车架悬架、电控箱、独立转向及行走组件。所述作业平台通过电缸驱动和光轴导向的方法,实现地隙调节;所述车架悬架为龙门式结构,包括矩形车架、梁柱和横梁;所述电控箱、北斗‑激光雷达导航系统安装布置在车架悬架上;所述独立转向及行走组件包括行走机构、转向机构。本发明所述独立转向及行走组件提高了转向灵活性;所述车架悬架和地隙调节方法适应垄式种植或高杆作物田间多任务作业;所述作业平台可以挂接、安装不同作业执行部件完成多种田间作业任务;所述北斗‑激光雷达导航系统实现精准导航。
技术研发人员:王超,程义锋,邹湘军,董广翔,吴俊,侯安祺
受保护的技术使用者:新疆大学
技术研发日:
技术公布日:2025/3/3
- 还没有人留言评论。精彩留言会获得点赞!