编队车辆行驶控制方法、车辆编队行驶系统及存储介质与流程
本发明涉及自动驾驶,具体涉及一编队车辆行驶控制方法、车辆编队行驶系统及存储介质。
背景技术:
1、随着自动驾驶技术的发展,单车自动驾驶已经得到了广泛推广应用这也为自动驾驶编队行驶提供了实现的基础,车辆编队行驶能够有效提升运输效率。自动驾驶编队行驶指的是两辆或者两辆以上的车辆,基于智能传感器、无线通信和云平台等技术,通过数据共享和协同决策,以队列的形式在特定的场景下自动驾驶。
2、车辆编队在行驶过程中,会因控制不当或者路况复杂(比如,雨天、泥泞路段等打滑路段),导致车辆漂移、牵引车车头和挂车夹角过大失控、编队车辆跑偏等风险;这些情况可能会导致交通事故和安全隐患。
技术实现思路
1、本发明的目的是提供了一种编队车辆行驶控制方法、车辆编队行驶系统及存储介质,车辆编队在行驶过程中,基于相邻的前车与后车的行车轨迹数据确定出相邻车辆之间的视觉预期数据,再结合这两个车辆的视觉预期数据与这两个车辆实际采集的视觉图像数据进行对比,便能够判断相邻车辆或者整个车辆编队是否存在姿态异常或者失控风险,从而可在编队车辆行驶出现异常时及时控制各车辆的行驶状态,避免出现交通事故和安全隐患,提升车辆编队的行驶稳定性和安全性。
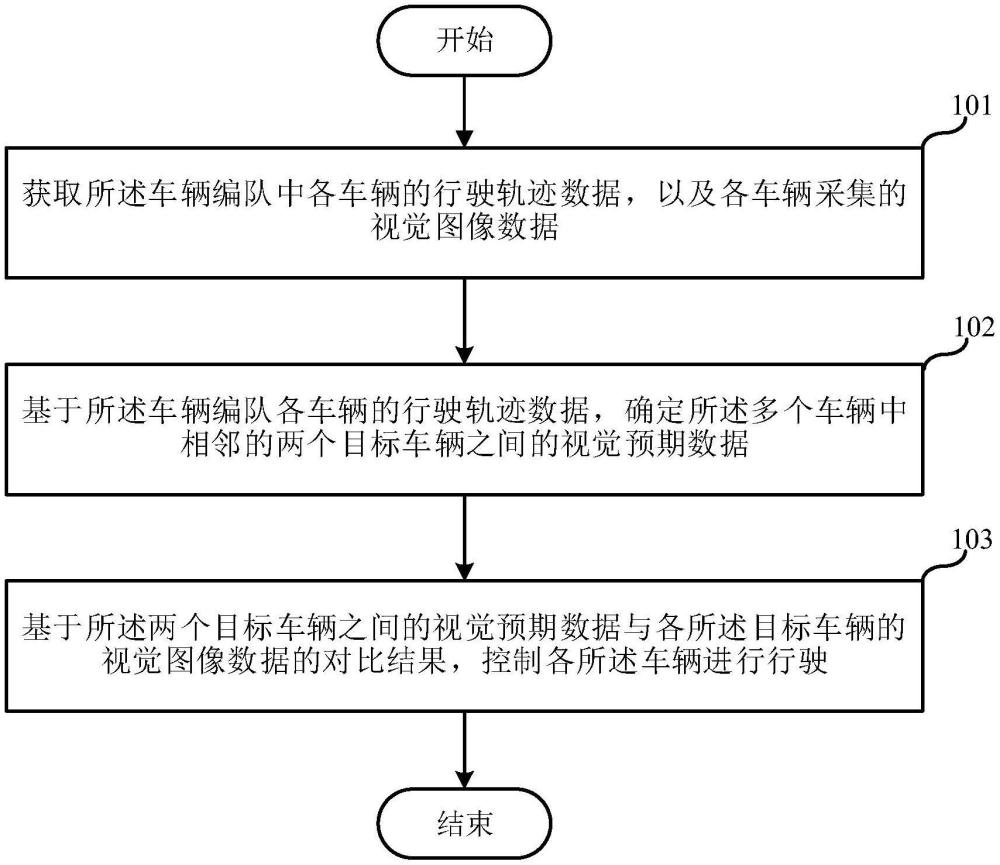
2、为实现上述目的,本发明提供了一种编队车辆行驶控制方法,应用于车辆编队,所述多个车辆依次排列行驶;所述方法包括:获取所述车辆编队中各车辆的行驶轨迹数据,以及各车辆采集的视觉图像数据;基于所述车辆编队各车辆的行驶轨迹数据,确定所述多个车辆中相邻的两个目标车辆之间的视觉预期数据;基于所述两个目标车辆之间的视觉预期数据与各所述目标车辆的视觉图像数据的对比结果,控制各所述车辆进行行驶。
3、本发明还提供了一种车辆编队行驶系统,包括:相互通信的多个车辆,以及中央处理单元,所述多个车辆依次排列行驶形成车辆编队;所述中央处理单元用于执行上述的编队车辆行驶控制方法。
4、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质为非易失性存储介质或非瞬态存储介质,其上存储有计算机程序,所述计算机程序被处理器运行时执行如上述的编队车辆行驶控制方法的步骤。
5、在一个实施例中,所述基于所述车辆编队各车辆的行驶轨迹数据,确定所述多个车辆中相邻的两个目标车辆之间的视觉预期数据,包括:
6、基于所述车辆编队相邻车辆的行驶轨迹数据,确定所述两个目标车辆之间的行驶角度差;
7、基于所述两个目标车辆之间的行驶角度差,确定所述两个目标车辆之间的视觉预期数据。
8、在一个实施例中,所述车辆采集的视觉图像数据包括:所述车辆前方的前视图像与所述车辆后方的后视图像;
9、所述两个目标车辆之间的视觉预期数据包括:预期前车信息与预期后车信息;所述两个目标车辆包括:前后行驶的第一目标车辆与第二目标车辆;
10、所述基于所述两个目标车辆之间的视觉预期数据与各所述目标车辆的视觉图像数据的对比结果,控制各所述车辆进行行驶,包括:
11、将所述视觉图像数据中的预期前车信息与所述第二目标车辆的前视图像进行对比,获取第一对比结果;
12、将所述视觉图像数据中的预期后车信息与所述第一目标车辆的后视图像进行对比,获取第二对比结果;
13、若基于所述第一对比结果与所述第二对比结果确定所述两个目标车辆之间的偏差超过设定阈值,则至少对所述两个目标车辆进行行驶控制。
14、在一个实施例中,所述至少对所述两个目标车辆进行行驶控制,包括:
15、若所述第一对比结果与所述第二对比结果指示所述第一目标车辆的转弯角度过大,则控制所述第一目标车辆减小转弯角度;
16、若所述第一对比结果与所述第二对比结果指示所述两个目标车辆之间的车距太近,则控制增大所述第一目标车辆与所述第二目标车辆之间的车距。
17、在一个实施例中,控制增大所述第一目标车辆与所述第二目标车辆之间的车距,包括:
18、控制所述第一目标车辆以及所述第一目标车辆之后的所述车辆同时减速;或者,
19、控制所述第二目标车辆以及所述第二目标车辆之前的所述车辆同时加速。
20、在一个实施例中,所述方法还包括:
21、在基于所述第一对比结果与所述第二对比结果确定所述两个目标车辆之间的偏差超过设定阈值之后,还包括:发出预设的报警信息至所述两个目标车辆。
技术特征:
1.一种编队车辆行驶控制方法,其特征在于,应用于车辆编队,所述车辆编队的多个车辆依次排列行驶;所述方法包括:
2.根据权利要求1所述的编队车辆行驶控制方法,其特征在于,所述基于所述车辆编队各车辆的行驶轨迹数据,确定所述多个车辆中相邻的两个目标车辆之间的视觉预期数据,包括:
3.根据权利要求1或2所述的编队车辆行驶控制方法,其特征在于,所述车辆采集的视觉图像数据包括:所述车辆前方的前视图像与所述车辆后方的后视图像;
4.根据权利要求3所述的编队车辆行驶控制方法,其特征在于,所述至少对所述两个目标车辆进行行驶控制,包括:
5.根据权利要求4所述的编队车辆行驶控制方法,其特征在于,控制增大所述第一目标车辆与所述第二目标车辆之间的车距,包括:
6.根据权利要求3所述的编队车辆行驶控制方法,其特征在于,所述方法还包括:
7.一种车辆编队行驶系统,其特征在于,包括:相互通信的多个车辆,以及中央处理单元,所述多个车辆依次排列行驶形成车辆编队;
8.根据权利要求7所述的车辆编队行驶系统,其特征在于,所述中央处理单元为任一所述车辆的控制单元。
9.根据权利要求7所述的车辆编队行驶系统,其特征在于,所述车辆编队行驶系统还包括:云服务器,所述中央处理单元为所述云服务器。
10.一种计算机可读存储介质,所述计算机可读存储介质为非易失性存储介质或非瞬态存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时执行如权利要求1-7任一项所述的编队车辆行驶控制方法步骤。
技术总结
本发明实施例提供了一种编队车辆行驶控制方法、车辆编队行驶系统及存储介质,涉及自动驾驶技术领域。编队车辆行驶控制方法,包括:获取所述车辆编队中各车辆的行驶轨迹数据,以及各车辆采集的视觉图像数据;基于所述车辆编队各车辆的行驶轨迹数据,确定所述多个车辆中相邻的两个目标车辆之间的视觉预期数据;基于所述两个目标车辆之间的视觉预期数据与各所述目标车辆的视觉图像数据的对比结果,控制各所述车辆进行行驶。本发明中,可在编队车辆行驶出现异常时及时控制各车辆的行驶状态,避免出现交通事故和安全隐患。
技术研发人员:秦文刚,殷承良,代堃鹏
受保护的技术使用者:上海智能网联汽车技术中心有限公司
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!