陆空跨域轮翼一体机器人
本技术属于机器人,尤其是涉及一种陆空跨域轮翼一体机器人。
背景技术:
1、陆空跨域机器人(land-air cross-domain robot)是一种能够在地面和空中之间无缝切换操作的机器人系统。它集成了先进的机器人技术、通信技术和自动化技术,具备地面行动和空中飞行的能力。陆空跨域机器人在安防、救援和工业等领域具有广泛的应用前景。
2、但是,目前陆空跨域机器人存在驱动冗余的问题,专利cn 114919354 a提出了一种陆空两栖三模式机器人,该机器人滚动需要2个驱动电机,飞行需要4个驱动电机,形态转换需要1个电机,共使用了7个驱动电机,驱动电机之前存在冗余,不利整体的轻量化和长时间续航。专利cn 115157921 a提出的一种陆空机器人的三模式变形轮同样存在驱动冗余的问题,利用了5个电机实现陆空运动。专利cn 115157947 a提出的一种陆空两栖变构型机器人在专利cn 115157921 a的基础上添加了形态转换机构和轮驱动机构,在原来的基础上进一步增加了四个驱动电机,使得驱动出现过度冗余。
3、目前陆空跨域机器人还存在地面行驶效率低,噪音大等问题。专利cn 114889379a提出了一种陆空两栖运动机器人,通过在移动底盘和四旋翼中间设置舵机驱动的传动组件,该机器人通过舵机让旋翼平面与水平呈现一定的角度,从而使旋翼升力的水平分力推导机器人前进。该机器人在地面行驶时旋翼需高速转动,噪音大;旋翼转动的升力并没有完全用于前进的动力,能力转换效率低;旋翼转动会消耗额外的能力,进一步降低了续航时间。
4、目前陆空跨域机器人还存在自由度受限的问题。专利cn111137082a提供的单涵道陆空跨域机器人通过设置姿态平衡系统的控制力矩陀螺群获得x轴、y轴和z轴的扭矩控制量,进而通过扭矩控制量对机身进行姿态调整;通过两个轮足舵机控制轮足装置的腿部连杆和上腿关节,根据环境识别系统对行进环境的判断,对轮足系统、涵道风扇系统以及飞行控制系统进行相应调整。该机器人涵道风扇系统和轮足系统的配置可能导致机器人在某些特定环境或场景下无法灵活移动或转向,无法完成越障或攀爬等特殊任务。
技术实现思路
1、本实用新型所要解决的技术问题是怎样解决陆空跨域机器人驱动冗余且自由度受限的问题,提出了一种陆空跨域轮翼一体机器人。
2、为解决上述技术问题,本实用新型所采用的技术方案是:
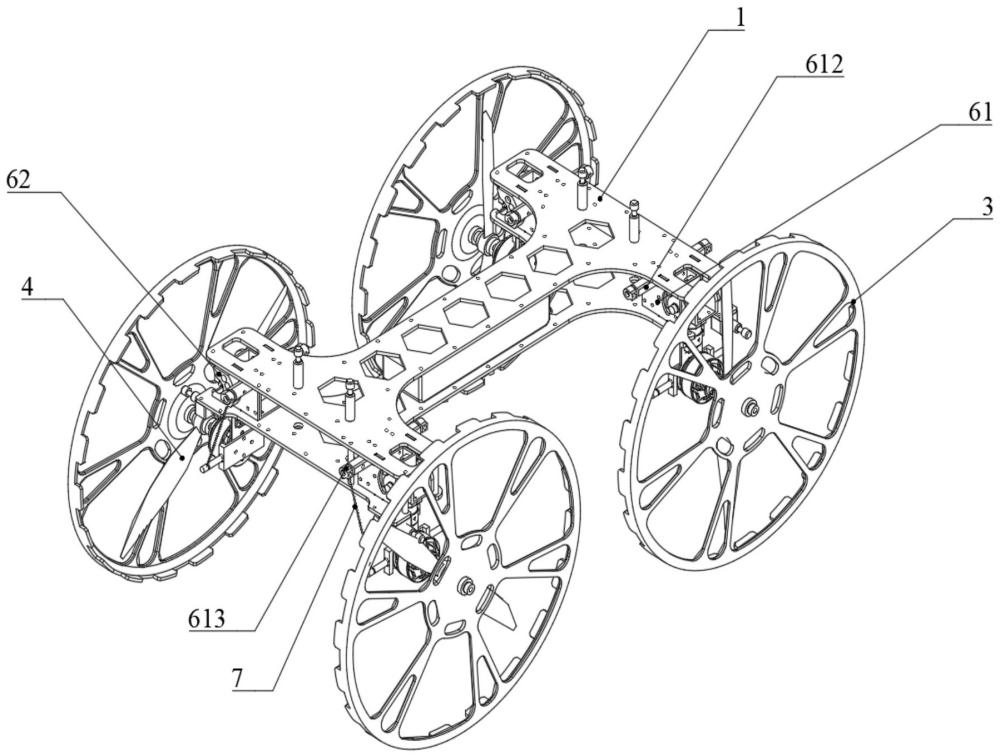
3、一种陆空跨域轮翼一体机器人,其特征在于,包括机架、机臂、用于陆地行走的行驶轮、分别与所述行驶轮同轴安装的旋翼,机臂的一端可旋转连接在机架上,机臂的另一端垂直安装有电机,电机的输出轴与机臂垂直,电机的输出轴上安装旋翼和行驶轮,还包括在机臂与机架连接端上安装的姿态转换装置,所述姿态转换装置在机臂回落时,依靠自身重力回落并设置有在机臂回落时的多种姿态进行姿态固定的姿态固定器,所述姿态转换装置在机臂抬起时,依靠旋翼旋转时产生的推力向上抬起。
4、进一步地,所述姿态转换装置包括两块垂直固接在所述机架上用于对机臂多个回落位置进行固定的限位板,其中一块限位板外侧装设有限位块,两块限位板上分别开设有弧形长孔,所述限位块上开设有多个用于对机臂进行限位的限位孔,多个限位孔的孔洞位于弧形长孔的外侧,在两块限位板之间还设置有一根柱状体,用于贯穿在两个限位板的弧形长孔中且在该柱状体向一侧水平运动时可卡合在弧形长孔外侧的某一限位孔中,
5、机臂与机架的连接通过在机臂的端头设置有连接底座,所述连接底座的底部与机臂端头连接,连接底座的两块侧板上开设有通孔,在两块限位板上也开设有通孔,塞打螺丝贯穿限位板以及连接底座侧板上的通孔使机臂绕塞打螺丝旋转,连接底座两块侧板之间的后背板上装设有方框状的电磁铁,
6、所述柱状体贯穿电磁铁方框的两个侧壁后贯穿在两个限位板的弧形长孔内,所述柱状体上在设置有限位块一侧的限位板内侧一定距离上垂直固接有可被电磁铁吸附的吸盘,所述吸盘与电磁铁之间装设有弹簧,电磁铁充电时,吸附吸盘向电磁铁运动,带动所述柱状体向内移动离开限位孔,电磁铁断电时,所述吸盘在弹簧作用下向外移动带动柱状体卡合在限位孔中。
7、进一步地,电机的输出轴上正装和反装各一个单向轴承,所述旋翼装设在电机输出轴内侧的正装单向轴承上,行驶轮装设在反装单向轴承上,在正装单向轴承和反装单向轴承的两侧都分别装设推力轴承,旋翼外侧的推力轴承和行驶轮内侧的推力轴承之间装设有制动环。
8、进一步地,所述姿态转换装置还包括对称安装在机臂两侧的弹簧,弹簧的一端挂在限位板外侧,另一端挂在机臂外端机臂与驱动电机的连接处。
9、进一步地,弹簧的挂端,是指在限位板外侧或者在机臂外端机臂与驱动电机的连接处固接有纤维管,在所述纤维管内侧设置一个轴套,弹簧挂钩挂上后,在所述纤维管外侧使用另一个轴套拧紧。
10、进一步地,在两块限位板之间设置有u型槽板,用于对两块限位板起固定支撑作用,所述u型槽板的两个侧壁分别固接在两个限位板上。
11、进一步地,在所述机架上设置有行驶轮阻尼器,用于在空域状态时,卡合在行驶轮外缘的凹槽中。
12、进一步地,在所述机架下方设置有旋翼阻尼器,用于在陆域状态时,阻止旋翼转动。
13、采用上述技术方案,本实用新型具有如下有益效果:
14、本实用新型提供的一种陆空跨域轮翼一体机器人,通过姿态转换装置,使得机器人在回落或上升过程中,有多个停留位置,在机臂回落时,依靠自身重力回落并设置有在机臂回落时的多种姿态进行姿态固定的姿态固定器,所述姿态转换装置在机臂抬起时,依靠旋翼旋转时产生的推力向上抬起,不需要设置额外的驱动器,减少了驱动器的使用数量。
技术特征:
1.一种陆空跨域轮翼一体机器人,其特征在于,包括机架、机臂、用于陆地行走的行驶轮、分别与所述行驶轮同轴安装的旋翼,机臂的一端可旋转连接在机架上,机臂的另一端垂直安装有电机,电机的输出轴与机臂垂直,电机的输出轴上安装旋翼和行驶轮,还包括在机臂与机架连接端上安装的姿态转换装置,所述姿态转换装置在机臂回落时,依靠自身重力回落并设置有在机臂回落时的多种姿态进行姿态固定的姿态固定器,所述姿态转换装置在机臂抬起时,依靠旋翼旋转时产生的推力向上抬起。
2.根据权利要求1所述的陆空跨域轮翼一体机器人,其特征在于,所述姿态转换装置包括两块垂直固接在所述机架上用于对机臂多个回落位置进行固定的限位板,其中一块限位板外侧装设有限位块,两块限位板上分别开设有弧形长孔,所述限位块上开设有多个用于对机臂进行限位的限位孔,多个限位孔的孔洞位于弧形长孔的外侧,在两块限位板之间还设置有一根柱状体,用于贯穿在两个限位板的弧形长孔中且在该柱状体向一侧水平运动时可卡合在弧形长孔外侧的某一限位孔中,
3.根据权利要求2所述的陆空跨域轮翼一体机器人,其特征在于,电机的输出轴上正装和反装各一个单向轴承,所述旋翼装设在电机输出轴内侧的正装单向轴承上,行驶轮装设在反装单向轴承上,在正装单向轴承和反装单向轴承的两侧都分别装设推力轴承,旋翼外侧的推力轴承和行驶轮内侧的推力轴承之间装设有制动环。
4.根据权利要求3所述的陆空跨域轮翼一体机器人,其特征在于,所述姿态转换装置还包括对称安装在机臂两侧的弹簧,弹簧的一端挂在限位板外侧,另一端挂在机臂外端机臂与驱动电机的连接处。
5.根据权利要求4所述的陆空跨域轮翼一体机器人,其特征在于,弹簧的挂端,是指在限位板外侧或者在机臂外端机臂与驱动电机的连接处固接有纤维管,在所述纤维管内侧设置一个轴套,弹簧挂钩挂上后,在所述纤维管外侧使用另一个轴套拧紧。
6.根据权利要求5所述的一种陆空跨域轮翼一体机器人,其特征在于,在两块限位板之间设置有u型槽板,用于对两块限位板起固定支撑作用,所述u型槽板的两个侧壁分别固接在两个限位板上。
7.根据权利要求5所述的陆空跨域轮翼一体机器人,其特征在于,在所述机架上设置有行驶轮阻尼器,用于在空域状态时,卡合在行驶轮外缘的凹槽中。
8.根据权利要求5所述的陆空跨域轮翼一体机器人,其特征在于,在所述机架下方设置有旋翼阻尼器,用于在陆域状态时,阻止旋翼转动。
技术总结
本技术提出了一种陆空跨域轮翼一体机器人,通过姿态转换装置,使得机器人在回落或上升过程中,有多个停留位置,在机臂回落时,依靠自身重力回落并设置有在机臂回落时的多种姿态进行姿态固定的姿态固定器,所述姿态转换装置在机臂抬起时,依靠旋翼旋转时产生的推力向上抬起,不需要设置额外的驱动器,减少了驱动器的使用数量。
技术研发人员:张萌,张孟琦,林卓宇,罗凯,徐春晓,阳明昊
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:20240105
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!