一种民航维修工具配送机器人
本技术属于移动机器人领域,特别涉及一种民航维修工具配送机器人。
背景技术:
1、在民航维修工具管理方面,目前国内许多公司在工具管理中已经采用了电子管理系统和一维条形码,但仅仅是在工具库房电脑客户端使用,利用扫码枪扫描条形码在管理系统内进行工具的登记或清除,这只能简化工具库房管理人员的工作,而机务维修人员还一直延续使用着传统方法——维修工具三清点。维修工具信息储存现阶段与传统方式相比不同的只是工具清单不再是手写而是打印形式,但是同样需要工作人员在清点的时候一件一件地比对清单进行寻找确认。如果做一些较为复杂、需要工具种类和数量较多的工作,甚至在此工作中还需要转移工作场地,清点工具将会是一件工作量非常大的工作,占据了维修人员大量的时间和精力(明卉,王博鳌.二维码技术在民航维修工具管理中的应用研究[j].科技经济市场,2021,(2):21-2.)。并且民航物资的运输搬运主要依靠人力,而且地勤人员的搬运方式各种各样,没有一种简单便捷的运输方式(曾亮,徐伊可,郭宗龙,et al.民航维修工具智能取送车设计[j].科技创新与应用,2023,13(7):42-5.)。
技术实现思路
1、为了至少解决现有技术存在的问题之一,本实用新型的目的是提供一种民航维修工具配送机器人,该实用新型可以有效解决配送效率低的问题,通过工具配送机器人来取代人力进行维修工具的运输配送,能够有效提高配送效率。
2、为了实现本发明目的,本实用新型提供的一种适用于民航维修领域的工具配送机器人,包括车架、轮胎、电机、工具箱、单片机、微型计算机、gps模块、激光雷达和惯性测量单元,
3、轮胎设置在车架的底部,电机与轮胎驱动连接;
4、工具箱、单片机、微型计算机、gps模块、激光雷达和惯性测量单元均设置在车架上,工具箱用于容纳维修工具,gps模块、激光雷达和惯性测量单元均分别与微型计算机连接,gps模块用于获取工具配送机器人当前的经纬度信息,激光雷达用于获取工具配送机器人的周边环境信息,惯性测量单元用于测量工具配送机器人的加速度、角加速度与地磁场方向并计算得到工具配送机器人的实际航向角;微型计算机用于基于ros操作系统运行slam建图程序生成周边地图并进行导航,输出主速度和航向角;单片机用于基于主速度和航向角得到电机的转速并控制电机运动。
5、优选地,所述工具配送机器人的车架包括下层板、上层板和连接柱,上层板位于下层板上方,且上层板和下层板之间通过连接柱连接,下层板与轮系相固定。进一步优选地,下层板、上层板均为玻纤板。
6、优选地,所述下层板上设置有加强梁。
7、优选地,设置有个电机,每个电机通过导线与相应的电子调速器连接,每个电子调速器有独立的id编号,电子调速器用于接收单片机输出的转速数据并根据id编号判断是否更新转速。
8、优选地,四个电子调速器的通信线接于中心板上,单片机与中心板连接。
9、优选地,还包括电池,电池用于给给单片机、微型计算机和电子调速器供电。
10、优选地,还包括屏幕,用于显示信息。
11、优选地,微型计算机、单片机、电池、电子调速器、中心板设置在下层板的不同位置处,屏幕、激光雷达、gps模块设置在上层板的不同位置处。
12、优选地,所述惯性测量单元为陀螺仪。
13、优选地,所述工具配送机器人使用差速轮。
14、优选地,惯性测量单元通过usb转spi通信方式与微型计算机实现数据传输,gps模块、激光雷达分别通过usb接口与微型计算机实现数据传输,
15、优选地,所述惯性测量单元能通过测量加速度、角加速度信号计算工具配送机器人姿态信息,配合gps模块、slam算法进行精准的导航。
16、优选的,所述工具配送机器人搭载的是cartographer激光slam定位算法,相较于其他slam算法,能够适用于较为广阔且参照物较少的工具配送环境;测量精度高,存在闭环检测,建图更为准确。
17、优选的,激光雷达使用镭神m10导航避障激光雷达,所述雷达抗强光,室内外通用,探测距离远,精度较高,能够进行360°全方位扫描,在较低的成本下能够满足实用新型需求。
18、优选的,单片机基于freertos操作系统运行,freertos操作系统的自主性、抢占性、中断管理以及资源管理进行分工设计、编程开发等使单片机处理任务更加高效。
19、优选的,微型计算机基于机器人操作系统ros运行slam程序,架构精简,集成度高,具有丰富的应用接口,可拓展性、可移植性好。
20、优选的,该智能工具配送机器人利用物联网技术实现app、智能配送机器人与维修车间服务器的信息共享,完成机场维修点和维修工具存放点中的自动配送,并将借用人的信息与被借工具关联,实现维修工具从借用到归还的追踪。
21、与现有技术相比,本实用新型至少具有如下优点:
22、(1)相较于市面上现有的agv小车,本实用新型无需按照划定好的轨迹行走,能够自主导航到达目的地,并且能够实现自主避障。
23、(2)本实用新型的智能工具配送机器人在满足使用需求的前提下将冗余的模块舍去,整车结构简洁轻盈,使得整车的成本得到控制,利于推广使用。
24、(3)本实用新型的工具配送机器人能够根据配送需求自主进行较长距离的工具搬运,以机械代替人力,提高配送效率,并且可以减少维修的时间和人工成本,提高维修效率。
技术特征:
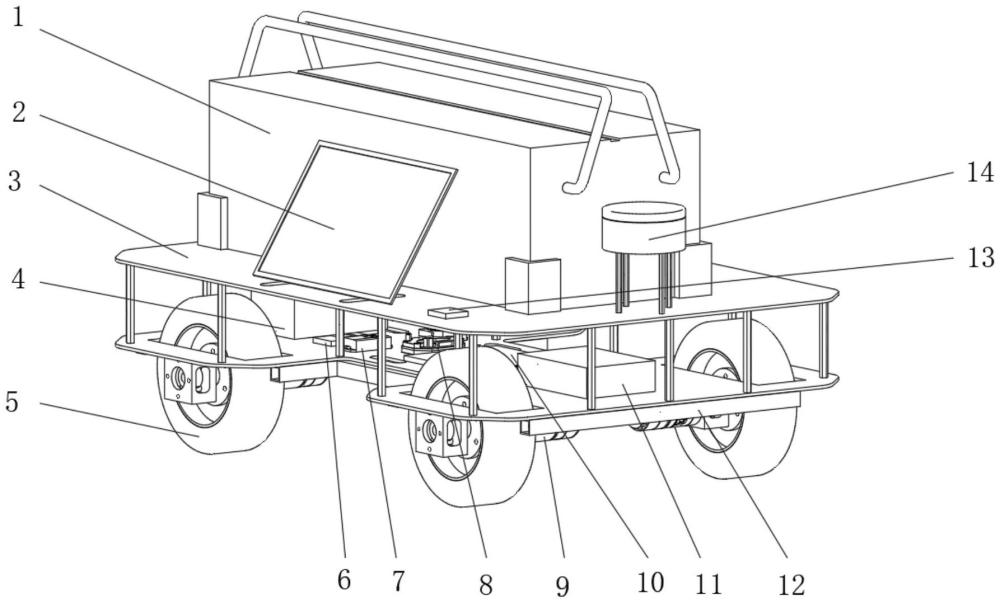
1.一种民航维修工具配送机器人,其特征在于,包括车架(3)、轮胎(5)、电机(9)、工具箱(1)、单片机(10)、微型计算机(11)、gps模块(13)、激光雷达(14)和惯性测量单元(6),
2.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,还包括屏幕(2),所述屏幕(2)设置在车架(3)上。
3.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,所述车架(3)包括下层板、上层板和连接柱,上层板位于下层板上方,且上层板和下层板之间通过连接柱连接。
4.根据权利要求3所述的一种民航维修工具配送机器人,其特征在于,所述下层板上设置有加强梁(12)。
5.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,设置有4个电机(9),每个电机(9)通过导线与相应的电子调速器(7)连接,每个电子调速器(7)有独立的id编号,电子调速器(7)用于接收单片机(10)输出的转速数据并根据id编号判断是否更新转速。
6.根据权利要求5所述的一种民航维修工具配送机器人,其特征在于,四个电子调速器(7)的通信线接于中心板(8)上,单片机(10)与中心板(8)连接。
7.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,还包括用于供电的电池(4)。
8.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,所述惯性测量单元(6)为陀螺仪。
9.根据权利要求1所述的一种民航维修工具配送机器人,其特征在于,所述工具配送机器人使用差速轮。
10.根据权利要求1-9任一所述的一种民航维修工具配送机器人,其特征在于,惯性测量单元(6)通过usb转spi通信方式与微型计算机(11)实现数据传输,gps模块(13)、激光雷达(14)分别通过usb接口与微型计算机(11)实现数据传输。
技术总结
本技术公开了一种民航维修工具配送机器人,用于民航维修领域的工具配送。包括:轮胎设置在车架的底部,电机与轮胎驱动连接;工具箱用于容纳维修工具,GPS模块、激光雷达和惯性测量单元均分别与微型计算机连接,GPS模块用于获取工具配送机器人当前的经纬度信息,激光雷达用于获取配送机器人的周边环境信息,惯性测量单元用于测量工具配送机器人的加速度、角加速度与地磁场方向并计算得到配送机器人的实际航向角;微型计算机基于生成周边地图并进行导航,输出主速度和航向角;单片机用于基于主速度和航向角得到电机的转速并控制电机运动。本工具配送机器人能够根据配送需求自主进行较长距离的工具搬运,减少维修的时间和人工成本,提高维修效率。
技术研发人员:李海,黄玮,林智鑫,黄松源,杨家瑞,黄沿江,白建坤
受保护的技术使用者:华南理工大学
技术研发日:20240401
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!