一种移动机器人脚轮定位器的制作方法
本技术涉及移动机器人领域,尤其涉及一种移动机器人脚轮定位器。
背景技术:
1、潜伏amr移动机器人属于新兴的产业及应用,潜伏amr搬运货架走到指定工位有对接工艺需求时,amr放置搬运的货架后,位置不一致或由于外力位置发生变化,导致amr不能二次搬运此货架,叉车在叉取货物时,在货架车由于叉车的外力,脚轮发生转动或位移变化,amr镜头不能二次识读货架车的二维码,导致不能搬运货架车驶离。
技术实现思路
1、本实用新型的目的是解决现有技术存在的以下问题:在货架车由于叉车的外力,脚轮发生转动或位移变化,amr镜头不能二次识读货架车的二维码,导致不能搬运货架车驶离。
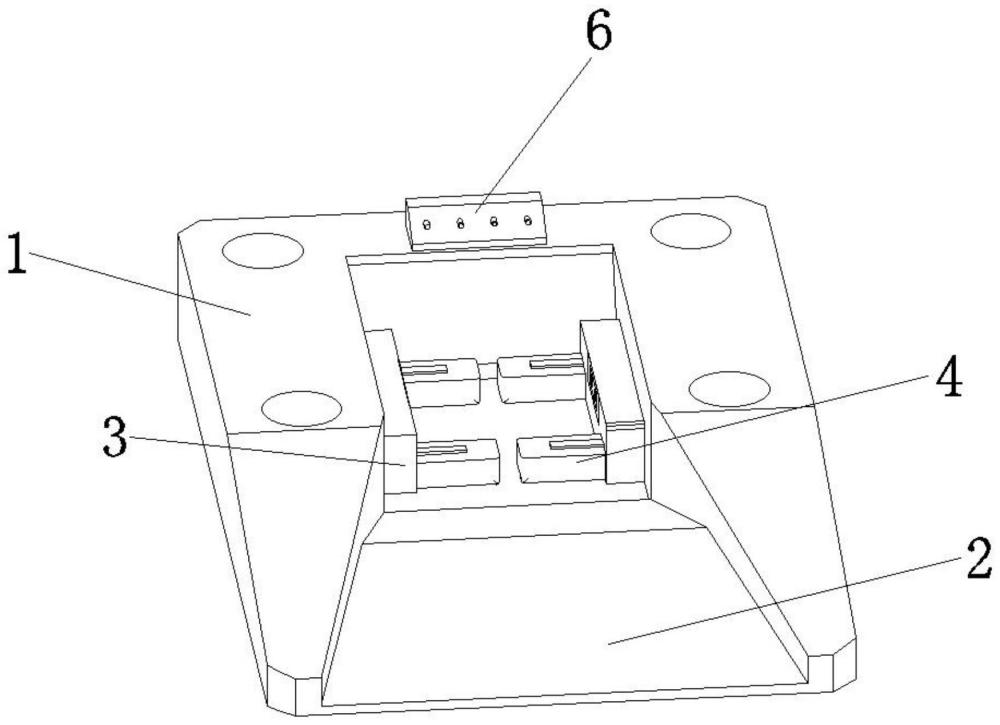
2、为解决现有技术存在的问题,本实用新型提供了一种移动机器人脚轮定位器,包括定位框架、斜板和红外感应器,所述定位框架内侧的右侧设有斜板,所述定位框架内侧设有两组红外感应器,所述红外感应器内侧设有两组脚轮固定板,所述定位框架内部设有电动伸缩杆,所述电动伸缩杆顶端设有信号检测器。
3、进一步的,所述定位框架顶部两侧设有两组定位孔,通过定位框架对移动机器人脚轮移动区域进行限位。
4、进一步的,所述红外感应器底部设有滑槽,通过红外感应器可对移动机器人脚轮进行感应。
5、进一步的,所述脚轮固定板顶部设有滑板,通过脚轮固定板可对移动机器人脚轮进行固定。
6、进一步的,所述信号检测器检测端设有防护罩,通过信号检测器可对移动机器人进行信号定位。
7、与现有技术相比,本实用新型的有益效果是:
8、本实用新型通过红外感应器会传递信号至控制终端,控制终端控制脚轮固定板4对移动机器人脚轮进行固定,从而可以确保脚轮在移动过程中保持稳定,减少因不稳定运动而引起的摇晃或晃动,提供更准确的脚轮定位,同时减少意外滑动或脱落的风险,从而提高机器人的操作安全性,提高了装置对移动机器人脚轮的固定效果。
技术特征:
1.一种移动机器人脚轮定位器,包括定位框架(1)、斜板(2)和红外感应器(3),其特征在于:所述定位框架(1)内侧的右侧设有斜板(2),所述定位框架(1)内侧设有两组红外感应器(3),所述红外感应器(3)内侧设有两组脚轮固定板(4),所述定位框架(1)内部设有电动伸缩杆(5),所述电动伸缩杆(5)顶端设有信号检测器(6)。
2.根据权利要求1所述的一种移动机器人脚轮定位器,其特征在于:所述定位框架(1)顶部两侧设有两组定位孔。
3.根据权利要求1所述的一种移动机器人脚轮定位器,其特征在于:所述红外感应器(3)底部设有滑槽。
4.根据权利要求1所述的一种移动机器人脚轮定位器,其特征在于:所述脚轮固定板(4)顶部设有滑板。
5.根据权利要求1所述的一种移动机器人脚轮定位器,其特征在于:所述信号检测器(6)检测端设有防护罩。
技术总结
本技术提供一种移动机器人脚轮定位器,涉及移动机器人领域,包括定位框架、斜板和红外感应器,所述定位框架内侧的右侧设有斜板,所述定位框架内侧设有两组红外感应器,所述红外感应器内侧设有两组脚轮固定板,所述定位框架内部设有电动伸缩杆,所述电动伸缩杆顶端设有信号检测器,本技术通过红外感应器会传递信号至控制终端,控制终端控制脚轮固定板4对移动机器人脚轮进行固定,从而可以确保脚轮在移动过程中保持稳定,减少因不稳定运动而引起的摇晃或晃动,提供更准确的脚轮定位,同时减少意外滑动或脱落的风险,从而提高机器人的操作安全性,提高了装置对移动机器人脚轮的固定效果。
技术研发人员:魏国新
受保护的技术使用者:长春建胜科技有限公司
技术研发日:20240423
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!