一种底盘机构及机器人的制作方法
本技术属于机器人,特别是涉及一种底盘机构及机器人。
背景技术:
1、随着科学技术的不断发展,越来越多的行业使用到机器人;目前,机器人广泛应用于工业运输、快递配送、迎宾讲解、安全巡检等领域。其中,机器人的可靠性体现在机器人底盘上,底盘的稳定性影响着机器人的运行和功能的实现。
2、现有技术中,机器人底盘主要由固定支架、弹簧(或带阻尼弹簧)以及驱动轮组成,该结构方式可实现机器人在运动过程中驱动轮持续抓地运动、防止驱动轮与地面互相打滑和减震功能。但是,由于机器人上承重的不同,机器人总体的重量将随着承重而发生改变,而弹簧的预紧力不会随着承重的改变而及时进行调节,从而导致机器人在运行过程中容易存在打滑、运行不稳定的问题。
技术实现思路
1、本实用新型针对现有技术中机器人底盘的预紧力不易调节的技术问题,提供了一种底盘机构及机器人。
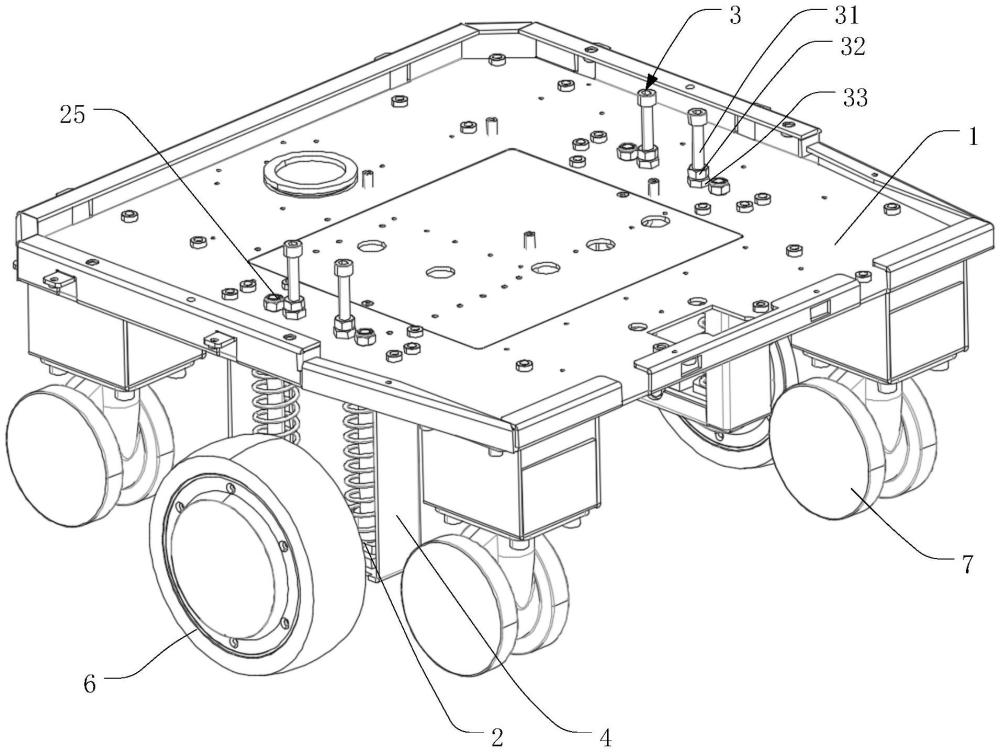
2、鉴于以上技术问题,本实用新型实施例提供一种底盘机构,包括底座、悬挂组件以及调节组件;
3、所述悬挂组件包括压板、支撑件、导向件以及弹性件,所述导向件的一端连接所述底座,所述导向件的另一端与所述支撑件滑动连接;所述压板滑动连接在所述导向件上;所述弹性件套接在所述导向件上,且相对两端分别与所述支撑件和所述压板抵接;
4、所述调节组件安装在所述底座上且与所述压板抵接,用于带动所述压板沿所述导向件移动,以调节所述弹性件的预紧力。
5、可选地,所述调节组件包括调节件、第一螺母以及安装在所述底座上的第二螺母,所述调节件上设有与所述第一螺母和所述第二螺母适配的外螺纹;
6、所述调节件的一端依次与所述第一螺母和所述第二螺母螺纹连接后与所述压板抵接;所述第一螺母活动套接在所述调节件上,且用于防止所述调节件与所述第二螺母之间出现松动。
7、可选地,所述底盘机构还包括安装在所述底座上的支架,所述支架和所述底座之间设有容纳空间;所述悬挂组件设置在所述容纳空间中;
8、所述底盘机构还包括轮轴和安装在所述轮轴上的车轮,所述轮轴远离所述车轮的一端安装在所述支撑件。
9、可选地,所述支架上设有翻边,所述翻边与所述底座抵接。
10、可选地,所述悬挂组件还包括第一固定件和第二固定件,所述底座上设有第一通孔,所述支撑件上设有第二通孔;所述导向件的一端穿过所述第一通孔后与所述第一固定件连接,所述导向件的另一端穿过所述第二通孔后与所述第二固定件连接。
11、可选地,所述支撑件包括设有轴孔的压块和连接所述压块的轴承,所述第二通孔设置在所述轴承上;
12、所述底盘机构还包括轮轴和安装在所述轮轴上的车轮,所述轮轴远离所述车轮的一端插接在所述轴孔中。
13、可选地,所述压块包括第一半压块和安装在所述第一半压块上的第二半压块,所述第一半压块连接所述轴承;
14、所述轴孔包括设置在所述第一半压块上的第一半凹槽,以及设置在所述第二半压块上的第二半凹槽。
15、可选地,所述底盘机构还包括万向轮和所述轮轴的驱动件,所述万向轮和所述驱动件均安装在所述底座上。
16、可选地,所述悬挂组件包括至少两个所述导向件和至少两个弹性件,所述导向件与所述弹性件一一对应设置;
17、所述压板滑动安装在两个所述导向件上;所有所述导向杆的一端连接所述底座,另一端与所述支撑件滑动连接;所有所述弹性件的相对两端分别与所述压板和所述支撑件抵接。
18、本实用新型另一实施例还提供了一种机器人,包括机器人体以及上述的底盘机构,所述机器人体安装在所述底座上。
19、本实用新型中,所述悬挂组件包括压板、支撑件、导向件以及弹性件,所述导向件的一端连接所述底座,所述导向件的另一端与所述支撑件滑动连接;所述压板滑动连接在所述导向件上;所述弹性件的相对两端分别与所述支撑件和所述压板抵接;所述调节组件安装在所述底座上且与所述压板抵接;所述调节组件可以带动所述压板沿所述导向件上下移动,从而所述压板可以改变所述弹性件的压缩量,进而达到调节所述弹性件预紧力的作用。用户可以根据机器人的承载量,通过所述调节组件及时调节所述弹性件的预紧力,保证了该底盘机构运行的稳定性和可靠性,且该底盘机构的调节操作简单。
技术特征:
1.一种底盘机构,其特征在于,包括底座、悬挂组件以及调节组件;
2.根据权利要求1所述的底盘机构,其特征在于,所述调节组件包括调节件、第一螺母以及安装在所述底座上的第二螺母,所述调节件上设有与所述第一螺母和所述第二螺母适配的外螺纹;
3.根据权利要求1所述的底盘机构,其特征在于,所述底盘机构还包括安装在所述底座上的支架,所述支架和所述底座之间设有容纳空间;所述悬挂组件设置在所述容纳空间中;
4.根据权利要求3所述的底盘机构,其特征在于,所述支架上设有翻边,所述翻边与所述底座抵接。
5.根据权利要求1所述的底盘机构,其特征在于,所述悬挂组件还包括第一固定件和第二固定件,所述底座上设有第一通孔,所述支撑件上设有第二通孔;所述导向件的一端穿过所述第一通孔后与所述第一固定件连接,所述导向件的另一端穿过所述第二通孔后与所述第二固定件连接。
6.根据权利要求5所述的底盘机构,其特征在于,所述支撑件包括设有轴孔的压块和连接所述压块的轴承,所述第二通孔设置在所述轴承上;
7.根据权利要求6所述的底盘机构,其特征在于,所述压块包括第一半压块和安装在所述第一半压块上的第二半压块,所述第一半压块连接所述轴承;
8.根据权利要求6所述的底盘机构,其特征在于,所述底盘机构还包括万向轮和所述轮轴的驱动件,所述万向轮和所述驱动件均安装在所述底座上。
9.根据权利要求1至8任意一项所述的底盘机构,其特征在于,所述悬挂组件包括至少两个所述导向件和至少两个弹性件,所述导向件与所述弹性件一一对应设置;
10.一种机器人,其特征在于,包括机器人体以及如权利要求1至9任意一项所述的底盘机构,所述机器人体安装在所述底座上。
技术总结
本技术属于机器人技术领域,特别是涉及一种底盘机构及机器人,底盘机构包括底座、悬挂组件以及调节组件;所述悬挂组件包括压板、支撑件、导向件以及弹性件,所述导向件的一端连接所述底座,所述导向件的另一端与所述支撑件滑动连接;所述压板滑动连接在所述导向件上;所述弹性件套接在所述导向件上,且相对两端分别与所述支撑件和所述压板抵接;所述调节组件安装在所述底座上且与所述压板抵接,用于带动所述压板沿所述导向件移动,以调节所述弹性件的预紧力。用户可以根据机器人的承载量,通过所述调节组件及时调节所述弹性件的预紧力,保证了该底盘机构运行的稳定性和可靠性,且该底盘机构的调节操作简单。
技术研发人员:周志超,韦星晨
受保护的技术使用者:丰巢网络技术有限公司
技术研发日:20240514
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!