一种电池安装结构及四足机器人的制作方法
本技术属于电池装配,尤其是涉及一种电池安装结构及四足机器人。
背景技术:
1、针对电池的安装,中国专利cn215644830u公开了《一种易拆卸的电池锁扣结构》,其在电池本体上具有凸出的锁扣斜面,壳体上安装有顶出弹簧和解锁按钮,顶出弹簧上安装有顶出弹块,顶出弹块与电池本体相抵接且和锁扣斜面构成锁扣组件,解锁按钮与顶出弹块相配,通过解锁按钮驱动顶出弹块实现伸缩。但是其结构相对复杂,装配零部件多,加工成本高。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种电池安装结构及四足机器人,电池和电池仓之间的拆装结构简单,加工零部件少,拆装方便省力。
2、本实用新型解决其技术问题所采用的技术方案是:一种电池安装结构,包括:
3、电池,底部形成有相对设置的至少两个滑轨,该滑轨侧壁具有突起,该突起具有倾斜引导面;
4、电池仓,至少包括设置在弹性复位件两侧的第一锁块和、第二锁块和弹性复位件,所述第一锁块和第二锁块分别具有阻挡部,该阻挡部具有倾斜作用面;
5、推动电池置入电池仓时,所述阻挡部沿着和滑轨相对移动,直至所述倾斜引导面和倾斜作用面相抵,第一锁块和第二锁块移动并挤压弹性复位件,所述突起越过第一锁块和第二锁块后,在弹性复位件作用下第一锁块和第二锁块伸展复位,所述阻挡部和突起相抵以阻止电池脱离。
6、进一步的,还包括解锁件,其具有至少两个斜推面,所述第一锁块和第二锁块分别具有可与斜推面相抵的倾斜滑行面,于解锁件施加外力,所述斜推面抵着倾斜滑行面平移,所述第一锁块和第二锁块相向移动并挤压弹性复位件,直至所述阻挡部反向越过突起。
7、进一步的,所述电池仓的内底部设有弹性推出件,当电池置入电池仓内时,该弹性推出件与电池端面相抵,且处于被压缩状态。
8、进一步的,所述电池仓形成有限位腔体,所述第一锁块、第二锁块52、解锁件的至少部分限位卡设连接在限位腔体内。
9、进一步的,所述弹性复位件的数量为两个,所述限位腔体内具有隔板,两个弹性复位件位于同一轴线,且端部分别与隔板两侧面相抵;所述第一锁块和第二锁块对称设置。
10、进一步的,所述滑轨为滑槽,其置入电池仓的端部开放设置。
11、进一步的,所述滑轨的开放端部呈扩口状。
12、进一步的,所述突起和滑轨另一侧壁的距离与阻挡部的最大宽度大致相等。
13、进一步的,所述倾斜滑行面和倾斜引导面的倾斜方向相同。
14、本实用新型还公开了一种四足机器人,包括外壳,连接于外壳底部的电池仓,连接于外壳的前足和后足,及电池,所述电池和电池仓之间设有上述电池安装结构。本实用新型的有益效果是:1)利用突起的倾斜引导面和阻挡部的倾斜作用面之间的相互配合,使得在电池推入电池仓内时,突起越过第一锁块和第二锁块即实现电池和电池仓的完全装配,整个操作简单,零部件少;2)突起越过第一锁块和第二锁块后,弹性复位件驱动第一锁块和第二锁块伸展复位,突起和阻挡部以水平面相抵接,不仅限位结构稳定,而且给操作者一个明显的手感提示,使得操作者知晓电池和电池仓完成安装;3)设置了解锁件,其利用两个斜推面同时驱动第一锁块和第二锁块相向挤压,对于电池和电池仓的拆卸更加方便、省力;4)第一锁块和第二锁块对称设置,使得电池两侧的锁止力相对均衡,电池和电池仓之间的安装更加稳固;5)弹性推出件的设置使得电池从电池仓的拆卸更加省力;6)滑轨设计为滑槽结构,且率先置入电池仓的端部开放,便于阻挡部的伸入,使得电池安装入电池仓的操作更加便捷;7)将突起和滑轨另一侧壁的距离设计为与阻挡部的最大宽度相等,保证滑轨对应突起的部分宽度仅能供阻挡部通过,保证突起和阻挡部之间的有效配合,避免突起越过第一锁块、第二锁块或者第一锁块和第二锁块越过突起时产生偏移。
技术特征:
1.一种电池安装结构,其特征在于,包括:
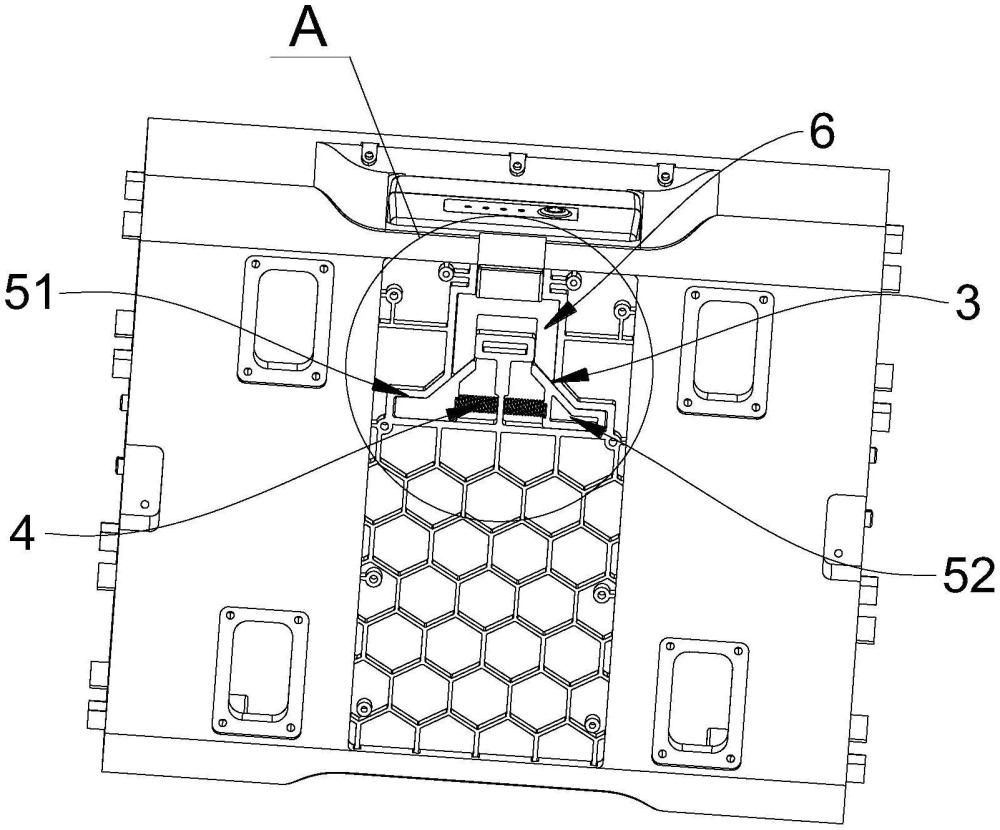
2.根据权利要求1所述的电池安装结构,其特征在于:还包括解锁件(6),其具有至少两个斜推面(61),所述第一锁块(51)和第二锁块(52)分别具有可与斜推面(61)相抵的倾斜滑行面(54),于解锁件(6)施加外力,所述斜推面(61)抵着倾斜滑行面(54)平移,所述第一锁块(51)和第二锁块(52)挤压弹性复位件(4),直至所述阻挡部(53)反向越过突起(21)。
3.根据权利要求1所述的电池安装结构,其特征在于:所述电池仓(3)的内底部设有弹性推出件(31),当电池(1)置入电池仓(3)内时,该弹性推出件(31)与电池(1)端面相抵,且处于被压缩状态。
4.根据权利要求2所述的电池安装结构,其特征在于:所述电池仓(3)形成有限位腔体(32),所述第一锁块(51)、第二锁块(52)、解锁件(6)的至少部分限位连接在限位腔体(32)内。
5.根据权利要求4所述的电池安装结构,其特征在于:所述弹性复位件(4)的数量为两个,所述限位腔体(32)内具有隔板(321),两个弹性复位件(4)位于同一轴线,且端部分别与隔板(321)两侧面相抵;所述第一锁块(51)和第二锁块(52)对称设置。
6.根据权利要求1所述的电池安装结构,其特征在于:所述滑轨(2)为滑槽,其置入电池仓(3)的端部开放设置。
7.根据权利要求6所述的电池安装结构,其特征在于:所述滑轨(2)的开放端部(22)呈扩口状。
8.根据权利要求1所述的电池安装结构,其特征在于:所述突起(21)和滑轨(2)另一侧壁的距离与阻挡部(53)的最大宽度大致相等。
9.根据权利要求2所述的电池安装结构,其特征在于:所述倾斜滑行面(54)和倾斜引导面(211)的倾斜方向相同。
10.一种四足机器人,其特征在于:包括外壳(7),连接于外壳(7)底部的电池仓(3),连接于外壳(7)的前足(81)和后足(82),及电池(1),所述电池(1)和电池仓(3)之间设有如权利要求1-9中任一项所述的电池安装结构。
技术总结
本技术公开了一种电池安装结构,包括:电池,底部形成有相对设置的至少两个滑轨,该滑轨侧壁具有突起,该突起具有倾斜引导面;电池仓,至少包括设置在弹性复位件两侧的第一锁块和、第二锁块和弹性复位件,第一锁块和第二锁块分别具有阻挡部,该阻挡部具有倾斜作用面;推动电池置入电池仓时,阻挡部沿着和滑轨相对移动,直至倾斜引导面和倾斜作用面相抵,第一锁块和第二锁块移动并挤压弹性复位件,突起越过第一锁块和第二锁块后,在弹性复位件作用下第一锁块和第二锁块伸展复位,阻挡部和突起相抵以阻止电池脱离。本技术利用突起的倾斜引导面和阻挡部的倾斜作用面之间的相互配合,使得在电池推入电池仓内时,整个操作简单,零部件少。
技术研发人员:徐凯,惠堂懋,李超,朱秋国
受保护的技术使用者:杭州云深处科技有限公司
技术研发日:20240620
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!