车辆的横向控制方法、装置、电子设备和存储介质与流程
本说明书涉及智能驾驶,尤其涉及车辆的横向控制方法、装置、电子设备和存储介质。
背景技术:
1、车辆的横向控制是智能驾驶系统中的关键技术之一,指的是控制车辆的横向位移,使其在行驶过程中保持在预定轨迹上。横向控制的目标是通过调整方向盘转角等手段,实现车辆在车道内的稳定行驶、车道保持或转向。
2、当前智能驾驶系统的横向控制功能主要依赖于车道线信息,通过摄像头、激光雷达等传感器识别车辆行驶道路中的车道线,并基于车道线信息对车辆进行横向控制。
3、然而,利用识别出的伪车道线或者杂乱车道线对车辆进行横向控制会影响横向控制的精确性。例如,若伪车道线(如路边标记、阴影)被识别为车辆所处目标车道的目标车道线,则基于该伪车道线进行横向控制会导致车辆产生不必要的转向,可能引发交通事故。
技术实现思路
1、为克服相关技术中存在的问题,本说明书提供了车辆的横向控制方法、装置、电子设备和存储介质。
2、根据本说明书实施例的第一方面,提供一种车辆的横向控制方法,所述方法包括:
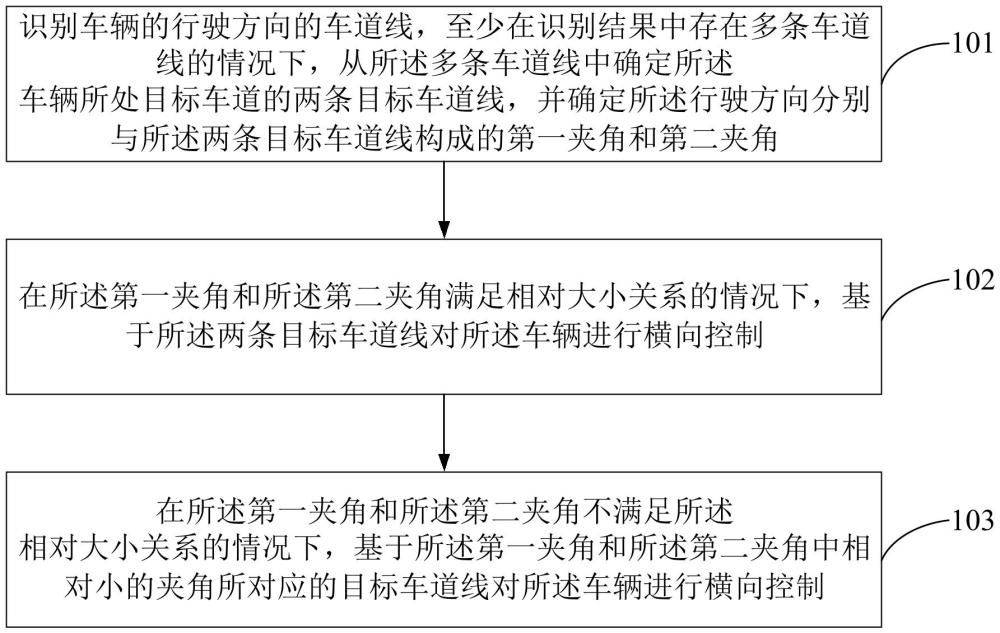
3、识别车辆的行驶方向的车道线,至少在识别结果中存在多条车道线的情况下,从所述多条车道线中确定所述车辆所处目标车道的两条目标车道线,并确定所述行驶方向分别与所述两条目标车道线构成的第一夹角和第二夹角;
4、在所述第一夹角和所述第二夹角满足相对大小关系的情况下,基于所述两条目标车道线对所述车辆进行横向控制;
5、在所述第一夹角和所述第二夹角不满足所述相对大小关系的情况下,基于所述第一夹角和所述第二夹角中相对小的夹角所对应的目标车道线对所述车辆进行横向控制。
6、根据本说明书实施例的第二方面,提供一种车辆的横向控制装置,所述装置包括:
7、夹角确定模块,用于识别车辆的行驶方向的车道线,至少在识别结果中存在多条车道线的情况下,从所述多条车道线中确定车辆所处目标车道的两条目标车道线,并确定所述行驶方向分别与所述两条目标车道线构成的第一夹角和第二夹角;
8、第一横向控制模块,用于在所述第一夹角和所述第二夹角满足相对大小关系的情况下,基于所述两条目标车道线对所述车辆进行横向控制;
9、第二横向控制模块,用于在所述第一夹角和所述第二夹角不满足相对大小关系的情况下,基于所述第一夹角和所述第二夹角中相对小的夹角所对应的目标车道线对所述车辆进行横向控制。
10、根据本说明书实施例的第二方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如第一方面所述的方法的步骤。
11、根据本说明书实施例的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面所述的方法的步骤。
12、本说明书的实施例提供的技术方案可以包括以下有益效果:
13、本说明书实施例中,确定车辆的行驶方向与识别出的目标车道的目标车道线构成的第一夹角和第二夹角。在第一夹角和第二夹角满足相对大小关系的情况下,说明两条目标车道线大概率为目标车道的真实车道线且适合用于对车辆进行横向控制,可以基于这两条目标车道线对车辆进行横向控制。在第一夹角和第二夹角不满足相对大小关系的情况下,说明其中一条车道线有可能为伪车道线或者杂乱车道线,此时从第一夹角和第二夹角中相对小的夹角所对应的目标车道线对车辆进行横向控制,可以排除伪车道线或者杂乱车道线对横向控制算法的干扰,提升横向控制的准确性,有效避免车辆产生不必要的转向。
14、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本说明书。
技术特征:
1.一种车辆的横向控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述至少在识别结果中存在多条车道线的情况下,包括:
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,所述从识别结果中确定待比较车道线的第一数量,以及在地图中标注的所述车辆所处行驶位置的车道线的第二数量,包括:
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述从所述多条车道线中确定车辆所处目标车道的两条目标车道线,包括:
7.根据权利要求1所述的方法,其特征在于,所述第一夹角和所述第二夹角满足相对大小关系,包括:
8.一种车辆的横向控制装置,其特征在于,所述装置包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本说明书提供一种车辆的横向控制方法、装置、电子设备和存储介质,所述方法包括:识别车辆的行驶方向的车道线,至少在识别结果中存在多条车道线的情况下,从所述多条车道线中确定所述车辆所处目标车道的两条目标车道线,并确定所述行驶方向分别与所述两条目标车道线构成的第一夹角和第二夹。在所述第一夹角和所述第二夹角满足相对大小关系的情况下,基于所述两条目标车道线对所述车辆进行横向控制。在所述第一夹角和所述第二夹角不满足所述相对大小关系的情况下,基于所述第一夹角和所述第二夹角中相对小的夹角所对应的目标车道线对所述车辆进行横向控制。
技术研发人员:耿志杨,高润新,舒双君
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!