一种隧道巡检机器人气化清洗装置的制作方法
【】本发明涉及清洗装置领域,尤其涉及一种隧道巡检机器人气化清洗装置。
背景技术
0、
背景技术:
1、当今随着时代和科技的发展,车辆已成为人们日常不可或缺的交通工具,伴随着的是高速公路隧道越来越多,且车流量日益增加,交通事故的发生率与日俱增。
2、同时,近年来随着城市建设的不断发展,城市规模的不断扩大,交通压力正在不断增大。在城市市政工程项目中,城市交通隧道的数量和规模在不断攀升,其隧道运营安全日益引起人们的重视。因此,在隧道内建设先进、稳定、可靠、可以24小时对隧道进行全方位监控的隧道监控,成为运营管理部门、养护部门和交通执法部门共同关心的问题。
3、采用隧道巡检机器人是隧道实时监控的好工具,而隧道巡检机器人在长时间的运行下,会被隧道中的灰尘与垃圾弄脏,导致巡检效果变差,比如拍摄模糊等会导致处理效率变低,给驾驶员带来不好的体验,并且对于隧道内的设备拍摄不清楚,会增加维修工的工作量。
4、故,现提出一种隧道巡检机器人气化清洗装置,能够清除巡检机器人外表上的大面积灰尘、粘性杂质、缝隙内杂质,清洗效果佳,提高清洗效率。
技术实现思路
0、
技术实现要素:
1、本发明所要解决的技术问题在于克服现有技术的不足而提供一种隧道巡检机器人气化清洗装置,能够清除巡检机器人外表上的大面积灰尘、粘性杂质、缝隙内杂质,清洗效果佳,提高清洗效率。
2、为解决上述技术问题,本发明采用如下技术方案:
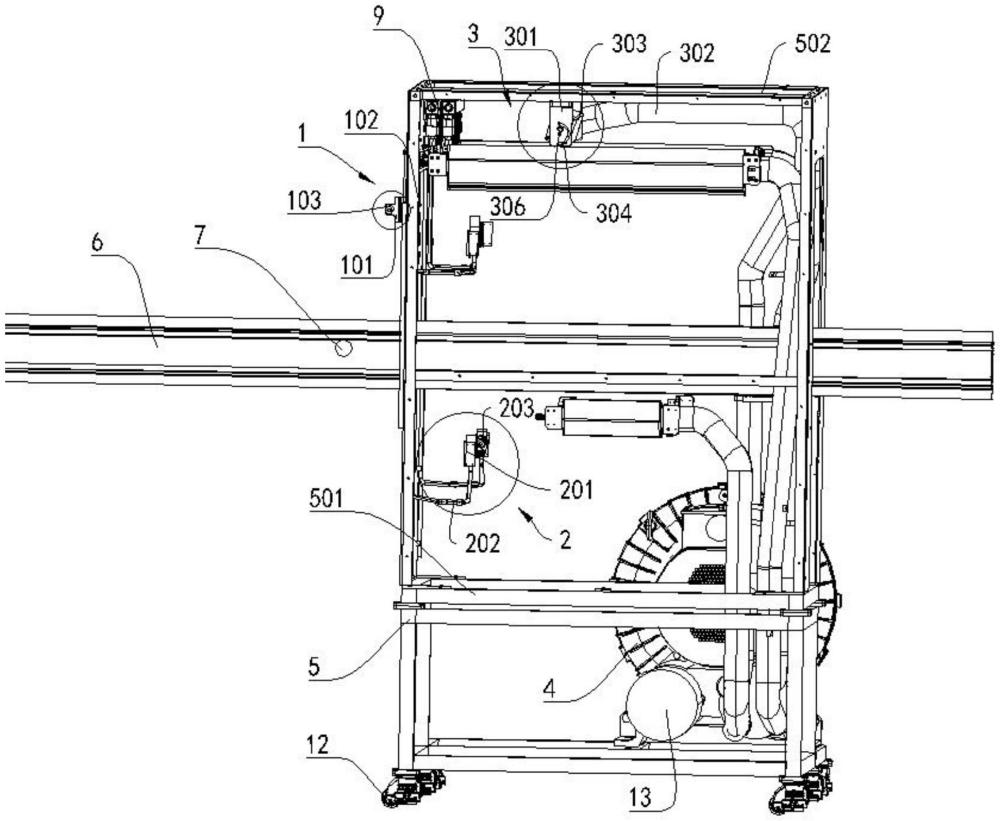
3、一种隧道巡检机器人气化清洗装置,用于清洗隧道巡检机器人外表,包括用于清理粘性杂质的第一清洗装置、用于清理缝隙内杂质的第二清洗装置和用于清洗大面积的第三清洗装置,巡检机器人先经过第一清洗装置进行初步清洗,后经过第二清洗装置和第三清洗装置进行细节清洗,且第一清洗装置、第二清洗装置、第三清洗装置连接气泵或者风机;
4、还包括清洗支架,第一清洗装置设于清洗支架外部,第二清洗装置和第三清洗装置设于清洗支架内部;
5、第一清洗装置包括固接在清洗支架上的第一固定件、第一气道、第一喷气管,第一喷气管的第一口径直径沿着喷气方向逐渐减小,第一固定件将第一喷气管固定在清洗支架外侧,第一气道连接第一喷气管以提供气体;
6、第二清洗装置对称设于清洗支架内部,第二清洗装置包括第二固定件、第二气道、第二喷气管,第二固定件固设于清洗支架内部,第二喷气管的第二口径直径沿着喷气方向逐渐减小,第二固定件上设有第一弧形孔,第二喷气管在第一弧形孔内调节喷气角度;
7、第三清洗装置对称设于清洗支架内部,第三清洗装置包括第三固定件、第三气道、第三喷气管,第三固定件固设于清洗支架内部,第三喷气管的第三口径面积沿着喷气方向逐渐减小,第三固定件上设有第二弧形孔,第三喷气管在第二弧形孔内调节喷气角度;
8、其中,第二口径直径小于第一口径的直径,第三口径直径大于第一口径直径,第一口径与第二口径形状为圆形,第三口径形状为线型。
9、作为优选,清洗支架为立体方形,清洗支架由至少一个条形支撑件和至少一个支撑板组成。
10、作为优选,第二固定件还设有第二固定孔,第二喷气管通过第二固定孔与第二固定件连接,并以第二固定孔为支点旋转调节喷气角度,第三固定件还设有第三固定孔,第三喷气管通过第三固定孔与第三固定件连接,并以第三固定孔为支点旋转调节喷气角度。
11、作为优选,还包括导轨和霍尔开关,巡检机器人经导轨滑行通过霍尔开关识别是否进入,当霍尔开关识别进入后,风机开始运作,其中霍尔开关设于第一喷气管外侧。
12、作为优选,第一气道、第二气道外侧设有至少一个固定块。
13、作为优选,还包括至少一个固定螺栓件,固定螺栓件排列成行,一端连接第一气道或者第二气道用于气体进入,一端连接第一气道或者第二气道用于气体导出。
14、作为优选,第三气道与第三固定件之间设有紧固件,紧固件上挖设有至少一个腰孔。
15、作为优选,清洗支架下方设有滑轮。
16、作为优选,风机出风口设有至少一个扩风管,扩风管连接多根第三气道。
17、一种隧道巡检机器人清洗操作方法,运用于如上述的一种隧道巡检机器人气化清洗装置,包括以下步骤:
18、步骤1:巡检机器人自动进入清洗区域;
19、步骤2:霍尔开关检测到巡检机器人进入;
20、步骤3:自动开启风机,进行吹风清洗;
21、步骤4:巡检机器人缓慢前进,驶出清洗区域;
22、步骤5:自动关停风机,清洗过程完成。
23、采用本发明的有益效果:
24、1.第二清洗装置对称设于清洗支架内部,第二清洗装置包括第二固定件、第二气道、第二喷气管,第二固定件固设于清洗支架内部,第二喷气管的第二口径直径沿着喷气方向逐渐减小,气体受到挤压能够有效增大气流的强度,增强清洗效果,第二固定件上设有第一弧形孔,第二喷气管在第一弧形孔内调节喷气角度,角度调节便利,对于隧道机器人外表的多条缝隙进行多方位的清理;
25、2.第三清洗装置对称设于清洗支架内部,第三清洗装置包括第三固定件、第三气道、第三喷气管,第三固定件固设于清洗支架内部,第三喷气管的第三口径面积沿着喷气方向逐渐减小,第三口径形状为线型,有效扩大大清理面积,第三固定件上设有第二弧形孔,第三喷气管在第二弧形孔内调节喷气角度,角度调节便利,对于隧道机器人外表的六面进行多方位的清理,提高清理效率,缩短隧道机器人的清理时间;
26、3.其中,第二口径直径小于第一口径的直径,第三口径直径大于第一口径直径,第二喷气管的气流强度要比第一喷气管的强度大,缝隙中的灰尘更难清理,故需要更强劲的气流进行清理,有效增强清理效果,第一口径与第二口径形状为圆形,圆形气流冲击力强,线型气流则清理面积更大。
27、本发明的这些特点和优点将会在下面的具体实施方式、附图中详细的揭露。
技术特征:
1.一种隧道巡检机器人气化清洗装置,用于清洗隧道巡检机器人外表,其特征在于,包括用于清理粘性杂质的第一清洗装置、用于清理缝隙内杂质的第二清洗装置和用于清洗大面积的第三清洗装置,巡检机器人先经过第一清洗装置进行初步清洗,后经过第二清洗装置和第三清洗装置进行细节清洗,且所述第一清洗装置、第二清洗装置、第三清洗装置连接气泵或者风机;
2.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述清洗支架为立体方形,所述清洗支架由至少一个条形支撑件和至少一个支撑板组成。
3.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述第二固定件还设有第二固定孔,第二喷气管通过第二固定孔与第二固定件连接,并以第二固定孔为支点旋转调节喷气角度,所述第三固定件还设有第三固定孔,第三喷气管通过第三固定孔与第三固定件连接,并以第三固定孔为支点旋转调节喷气角度。
4.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,还包括导轨和霍尔开关,巡检机器人经导轨滑行通过霍尔开关识别是否进入,当所述霍尔开关识别进入后,所述风机开始运作,其中霍尔开关设于第一喷气管外侧。
5.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述第一气道、第二气道外侧设有至少一个固定块。
6.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,还包括至少一个固定螺栓件,所述固定螺栓件排列成行,一端连接第一气道或者第二气道用于气体进入,一端连接第一气道或者第二气道用于气体导出。
7.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述第三气道与第三固定件之间设有紧固件,所述紧固件上挖设有至少一个腰孔。
8.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述清洗支架下方设有滑轮。
9.如权利要求1所述的一种隧道巡检机器人气化清洗装置,其特征在于,所述风机出风口设有至少一个扩风管,所述扩风管连接多根第三气道。
10.一种隧道巡检机器人清洗操作方法,运用于如权利要求1至9之一所述的一种隧道巡检机器人气化清洗装置,其特征在于,包括以下步骤:
技术总结
本发明涉及清洗装置领域,尤其涉及一种隧道巡检机器人气化清洗装置,包括第一清洗装置、第二清洗装置和第三清洗装置,巡检机器人先经过第一清洗装置进行初步清洗,后经过第二清洗装置和第三清洗装置进行细节清洗,且第一清洗装置、第二清洗装置、第三清洗装置连接气泵或者风机,还包括清洗支架,第一清洗装置包括固接在清洗支架上的第一固定件、第一气道、第一喷气管,第二清洗装置包括第二固定件、第二气道、第二喷气管,第三清洗装置对称设于清洗支架内部,第三清洗装置包括第三固定件、第三气道、第三喷气管。本发明优点在于能够清除巡检机器人外表上的大面积灰尘、粘性杂质、缝隙内杂质,清洗效果佳,提高清洗效率。
技术研发人员:徐君,罗广迪,张志荣,洪昌林,唐黎明,李响,娄鹏,李小芳
受保护的技术使用者:江苏中安智信通信科技股份有限公司
技术研发日:
技术公布日:2025/3/20
- 还没有人留言评论。精彩留言会获得点赞!