一种远程挪车的方法、系统及产品与流程
本申请涉及汽车自动驾驶,具体涉及一种远程挪车的方法、系统及产品。
背景技术:
1、伴随着人工智能产业进入快车道,智能驾驶技术得到了快速的发展,而这其中的泊车技术也得到了充分的发展。泊车也来到了除了停车场等较好停车场景,老旧小区,断头路的复杂场景也需要进行解决,当用户停车至相应复杂场景,可能出现挡住了别人的车辆,可能需要进行挪动进行错车,错车。
技术实现思路
1、有鉴于此,本申请提供一种远程挪车的方法、系统及产品。旨在优化用户对车辆进行挪车的使用体验。
2、本申请第一方面提供了一种远程挪车的方法,所述方法包括:
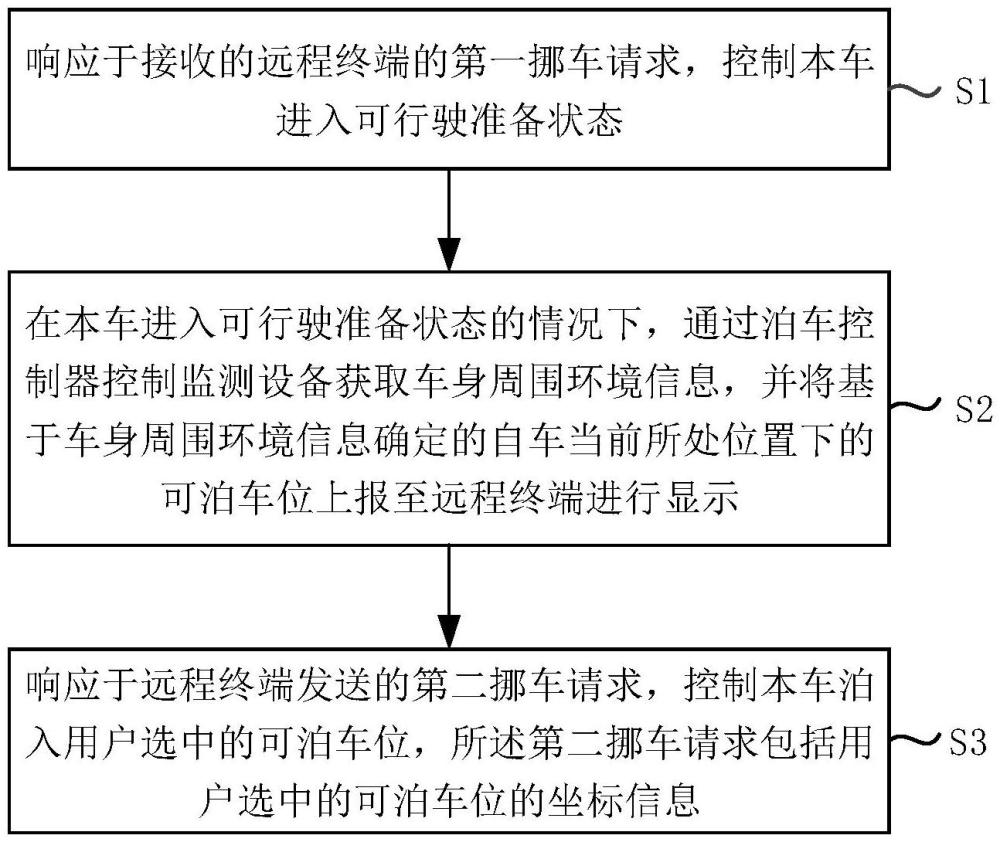
3、响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态;
4、在本车进入可行驶准备状态的情况下,通过泊车控制器控制监测设备获取车身周围环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行显示;
5、响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,所述第二挪车请求包括用户选中的可泊车位的坐标信息。
6、可选的,响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态,包括:
7、响应于接收的远程终端的第一挪车请求,确定本车状态,所述第一挪车请求为远程终端在确定自身状态满足第一设定条件的情况下发出的;
8、在本车状态满足第二设定条件的情况下,控制本车进行上电;
9、在本车上电的情况下,控制本车进入可行驶准备状态。
10、可选的,所述方法还包括:
11、响应于用户在远程终端中对可泊车位的第一目标操作,拷贝对应的虚拟可泊车位;
12、响应于用户对所述虚拟可泊车位的第二目标操作,在远程终端的显示中的目标位置创建可泊车位,所述目标位置为所述虚拟可泊车位在显示中拖拽的终点位置。
13、可选的,在用户选中的可泊车位为基于所述虚拟可泊车位创建的可泊车位的情况下,所述响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,包括:
14、响应于远程终端发送的第二挪车请求,以本车当前所处位置为起点和以基于所述虚拟可泊车位创建的可泊车位的坐标信息为终点进行路径规划;
15、根据路径规划结果,控制本车泊入用户选中的基于所述虚拟可泊车位创建的可泊车位。
16、可选的,根据路径规划结果,控制本车泊入用户选中的基于所述虚拟可泊车位创建的可泊车位,包括:
17、在路径规划结果为路径规划失败的情况下,向远程终端反馈无法泊入选中的可泊车位的提示信息;
18、在路径规划结果为路径规划成功的情况下,向远程终端反馈是否挪车至选中的可泊车位的提示信息;
19、响应于远程终端的确认指令,控制本车沿规划路径泊入选中的基于所述虚拟可泊车位创建的可泊车位。
20、可选的,响应于用户对所述虚拟可泊车位的第二目标操作,在远程终端的显示中的目标位置创建可泊车位,包括:
21、响应于用户对所述虚拟可泊车位的第二目标操作,在远程终端的显示中的目标位置创建初始可泊车位;
22、响应于用户对所述初始可泊车位的旋转操作,在远程终端的显示中的目标位置创建对应旋转角度的可泊车位。
23、可选的,所述方法还包括:
24、在控制本车泊入用户选中的可泊车位的情况下,通过泊车控制器控制监测设备继续获取车身周围环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行二次显示;
25、响应于远程终端发送的第三挪车请求,控制本车泊入用户二次选中的可泊车位,所述第三挪车请求包括用户二次选中的可泊车位的坐标信息。
26、本申请第二方面提供了一种远程挪车的系统,所述系统包括:
27、状态切换模块,用于响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态;
28、分析反馈模块,用于在本车进入可行驶准备状态的情况下,通过泊车控制器控制监测设备获取车身周围环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行显示;
29、控制模块,用于响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,所述第二挪车请求包括用户选中的可泊车位的坐标信息。
30、本申请第三方面提供了一种电子设备,包括:处理器、存储器及存储在所述存储器上并在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如本申请第一方面所述的一种远程挪车的方法中的步骤。
31、本申请第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如本申请第一方面所述的一种远程挪车的方法中的步骤。
32、本申请提供的一种远程挪车的方法具有以下优点:
33、本申请实施例提供的一种远程挪车的方法,首先响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态;在本车进入可行驶准备状态的情况下,通过泊车控制器控制监测设备获取车身周围环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行显示;响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,第二挪车请求包括用户选中的可泊车位的坐标信息。由此,用户只需在远程终端发送第一挪车请求,即可控制车辆启动进入可行驶准备状态,然后启用相应的监测设备来获取车身周围的环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行显示;然后基于用户在远程终端中选中的可泊车位,发送包括该可泊车位的坐标信息的第二挪车请求给到车辆,车辆则响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的该可泊车位,以此用户只需在远程启用远程挪车即可实现车辆挪至用户选中的可泊车位,从而可以使得用户对车辆进行挪车的使用体验更佳。
技术特征:
1.一种远程挪车的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种远程挪车的方法,其特征在于,响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态,包括:
3.根据权利要求1所述的一种远程挪车的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的一种远程挪车的方法,其特征在于,在用户选中的可泊车位为基于所述虚拟可泊车位创建的可泊车位的情况下,所述响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,包括:
5.根据权利要求4所述的一种远程挪车的方法,其特征在于,根据路径规划结果,控制本车泊入用户选中的基于所述虚拟可泊车位创建的可泊车位,包括:
6.根据权利要求3所述的一种远程挪车的方法,其特征在于,响应于用户对所述虚拟可泊车位的第二目标操作,在远程终端的显示中的目标位置创建可泊车位,包括:
7.根据权利要求1所述的一种远程挪车的方法,其特征在于,所述方法还包括:
8.一种远程挪车的系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,包括:处理器、存储器及存储在所述存储器上并在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7中任一项所述的一种远程挪车的方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的一种远程挪车的方法中的步骤。
技术总结
本申请实施例提供一种远程挪车的方法、系统及产品,该方法包括:响应于接收的远程终端的第一挪车请求,控制本车进入可行驶准备状态;在本车进入可行驶准备状态的情况下,通过泊车控制器控制监测设备获取车身周围环境信息,并将基于车身周围环境信息确定的自车当前所处位置下的可泊车位上报至远程终端进行显示;响应于远程终端发送的第二挪车请求,控制本车泊入用户选中的可泊车位,第二挪车请求包括用户选中的可泊车位的坐标信息。旨在优化用户对车辆进行挪车的使用体验。
技术研发人员:李诗怡,卢斌,蒲星,曾翠兰
受保护的技术使用者:重庆长安科技有限责任公司
技术研发日:
技术公布日:2025/3/18
- 还没有人留言评论。精彩留言会获得点赞!