跨介质机器人
本发明涉及机器人,尤其涉及一种跨介质机器人。
背景技术:
1、跨介质机器人是指能够在多种不同介质之间进行转换和操作的机器人,它们通常具备在空中飞行和水下潜航的能力。然而传统的跨介质机器人存在难以做到仿生摆尾推进、水空跨介质运动的技术问题。
2、因此,有必要提供一种新的跨介质机器人来解决上述技术问题。
技术实现思路
1、本发明的主要目的是提供一种跨介质机器人,旨在解决跨介质机器人难以做到仿生摆尾推进、水空跨介质运动的技术问题。
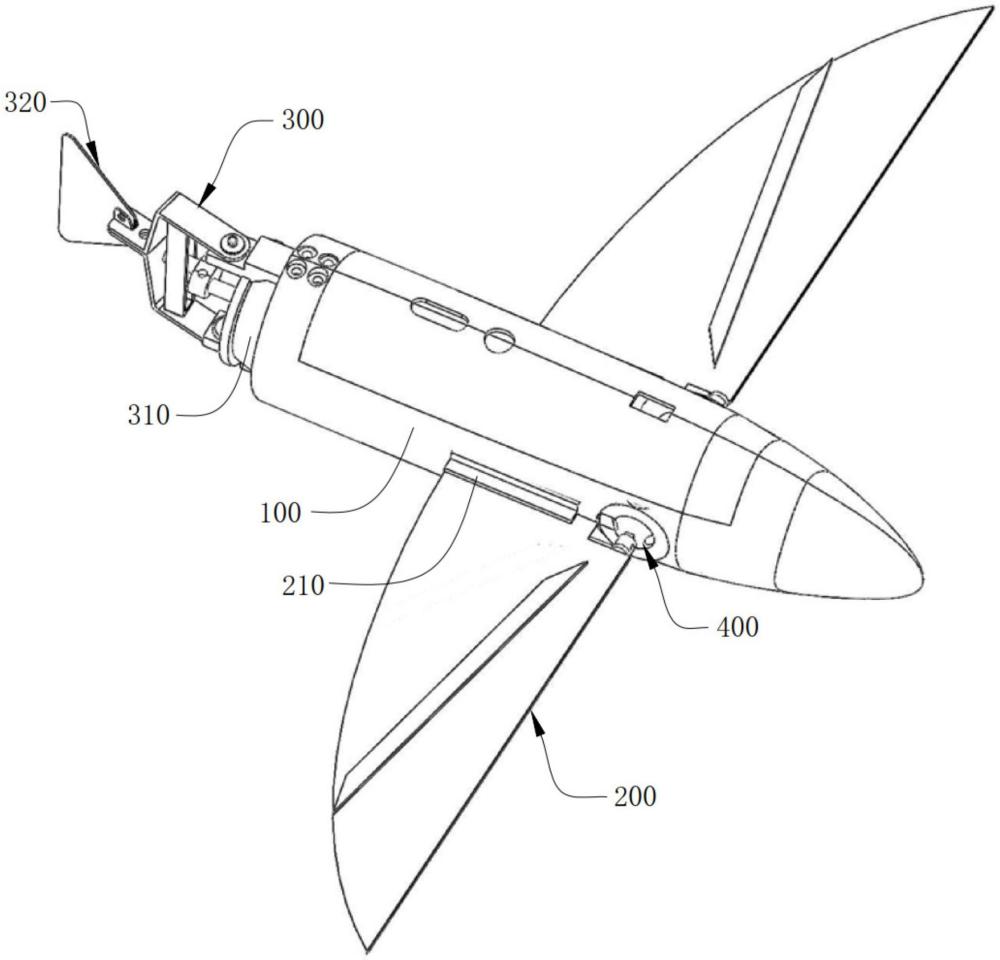
2、为实现上述目的,本发明提出的一种跨介质机器人,包括:
3、机身,所述机身设置有球形电机;
4、胸鳍,所述胸鳍包括固定鳍条、连接鳍条和连接所述固定鳍条和所述连接鳍条的柔性片,所述固定鳍条设置于所述机身,所述连接鳍条与所述球形电机连接;所述球形电机能驱动所述连接鳍条运动,以收折或展开所述胸鳍,并调节所述胸鳍的俯仰角度;
5、推进组件,所述推进组件包括驱动件和尾鳍,所述尾鳍摆动地设置于所述机身的尾部,所述驱动件驱动所述尾鳍摆动。
6、在一实施方式中,所述胸鳍还包括多个骨架鳍条,多个所述骨架鳍条均设置于所述柔性片,且所述连接鳍条和多个所述骨架鳍条交替设置于所述柔性片的两个端面。
7、在一实施方式中,任意相邻的两个所述骨架鳍条之间均设置有导向折痕。
8、在一实施方式中,所述推进组件还包括曲柄摇杆机构,所述曲柄摇杆机构连接所述驱动件的输出端和所述尾鳍,所述驱动件通过所述曲柄摇杆机构驱动所述尾鳍摆动。
9、在一实施方式中,所述曲柄摇杆机构包括曲柄、连杆和摇杆,所述曲柄设置于所述驱动件的输出端,所述连杆设置于所述曲柄并滑动地设置于所述摇杆,所述摇杆与所述尾鳍连接,且所述驱动件的输出端与所述连杆错位设置。
10、在一实施方式中,所述尾鳍包括板体和安装架,所述安装架转动地设置于所述机身的尾部,所述板体设置于所述安装架,且所述摇杆设置于所述安装架。
11、在一实施方式中,所述球形电机包括定子本体、电磁线圈组、定子盖、转子本体、作动磁铁组和连接块,所述定子盖设置于所述机身,所述定子本体设置于所述定子盖并与所述定子盖围设形成球形腔,所述定子本体呈半球型并设置有半球型的安装面,所述电磁线圈组设置于所述安装面;所述转子本体通过球面副活动地设置于所述球形腔,所述连接块设置于所述转子本体并与所述连接鳍条连接,所述作动磁铁组设置于所述转子本体;所述电磁线圈组能驱动所述作动磁铁组运动,以驱动所述转子本体运动。
12、在一实施方式中,所述转子本体背离所述定子本体的一侧设置有第一半球面,所述第一半球面设置有定位磁铁,所述定子盖上设置有霍尔传感器。
13、在一实施方式中,所述转子本体面向所述定子本体的一侧设置有第二半球面,所述作动磁铁组的数量为两个,两个所述作动磁铁组沿所述转子本体的中心轴线方向间隔设置;各所述作动磁铁组均包括四个永磁铁,四个所述永磁铁沿所述转子本体的周向方向间隔均匀设置,且四个所述永磁铁的极性呈交替排列。
14、在一实施方式中,所述安装面上均匀布置有多个安装槽,所述安装槽呈圆台型;
15、所述电磁线圈组包括多个线圈单元,所述线圈单元和所述安装槽的数量相等,多个所述线圈单元一一对应地设置于多个所述安装槽中。
16、本发明的技术方案通过结合球形电机能三自由度任意控制的特点和胸鳍的柔性自动收展的特点,能够使跨介质机器人在空中滑翔模态、空中机动模态、水下游动模态和水下机动模态之间切换,实现水下的游动和机动、空中的滑翔和机动的多种模态的自由切换;并且,利用驱动件驱动尾鳍摆动,能够使跨介质机器人模仿鱼类的游动,提升水下运动性能,并提升跨介质机器人在跨越介质时的速度和灵活性。在本实施例中,球形电机具有三自由度任意控制能力,其能够在三自由度上驱动连接鳍条运动,以调节胸鳍的姿态,实现水下和空中的姿态调节。具体地,在空中时,球形电机能驱动连接鳍条运动,展开胸鳍并使胸鳍小角度倾斜,也就是使胸鳍处于大后掠角小俯仰角的位置,进而使跨介质机器人处于空中滑翔模态;同时还可以使胸鳍大角度倾斜,也就是使胸鳍处于大后掠角大俯仰角的位置,进而使跨介质机器人处于空中机动模态。在水下时,球形电机能驱动连接鳍条运动,收折胸鳍并使胸鳍小角度倾斜,也就是使胸鳍处于小后掠角小俯仰角的位置,进而使跨介质机器人处于水下游动模态;同时,还可以使胸鳍大角度倾斜,也就是使胸鳍处于小后掠角大俯仰角的位置,进而使跨介质机器人处于水下机动模态。胸鳍由固定鳍条、连接鳍条和连接固定鳍条和连接鳍条的柔性片构成,将固定鳍条安装于机身,球形电机驱动连接鳍条运动,便可实现胸鳍的收折和展开。通过驱动件驱动尾鳍摆动,则能够使跨介质机器人模仿鱼类的游动,提升水下运动性能。
技术特征:
1.一种跨介质机器人,其特征在于,包括:
2.如权利要求1所述的跨介质机器人,其特征在于,所述胸鳍还包括多个骨架鳍条,多个所述骨架鳍条均设置于所述柔性片,且所述连接鳍条和多个所述骨架鳍条交替设置于所述柔性片的两个端面。
3.如权利要求2所述的跨介质机器人,其特征在于,任意相邻的两个所述骨架鳍条之间均设置有导向折痕。
4.如权利要求1所述的跨介质机器人,其特征在于,所述推进组件还包括曲柄摇杆机构,所述曲柄摇杆机构连接所述驱动件的输出端和所述尾鳍,所述驱动件通过所述曲柄摇杆机构驱动所述尾鳍摆动。
5.如权利要求4所述的跨介质机器人,其特征在于,所述曲柄摇杆机构包括曲柄、连杆和摇杆,所述曲柄设置于所述驱动件的输出端,所述连杆设置于所述曲柄并滑动地设置于所述摇杆,所述摇杆与所述尾鳍连接,且所述驱动件的输出端与所述连杆错位设置。
6.如权利要求5所述的跨介质机器人,其特征在于,所述尾鳍包括板体和安装架,所述安装架转动地设置于所述机身的尾部,所述板体设置于所述安装架,且所述摇杆设置于所述安装架。
7.如权利要求1所述的跨介质机器人,其特征在于,所述球形电机包括定子本体、电磁线圈组、定子盖、转子本体、作动磁铁组和连接块,所述定子盖设置于所述机身,所述定子本体设置于所述定子盖并与所述定子盖围设形成球形腔,所述定子本体呈半球型并设置有半球型的安装面,所述电磁线圈组设置于所述安装面;所述转子本体通过球面副活动地设置于所述球形腔,所述连接块设置于所述转子本体并与所述连接鳍条连接,所述作动磁铁组设置于所述转子本体;所述电磁线圈组能驱动所述作动磁铁组运动,以驱动所述转子本体运动。
8.如权利要求7所述的跨介质机器人,其特征在于,所述转子本体背离所述定子本体的一侧设置有第一半球面,所述第一半球面设置有定位磁铁,所述定子盖上设置有霍尔传感器。
9.如权利要求7所述的跨介质机器人,其特征在于,所述转子本体面向所述定子本体的一侧设置有第二半球面,所述作动磁铁组的数量为两个,两个所述作动磁铁组沿所述转子本体的中心轴线方向间隔设置;各所述作动磁铁组均包括四个永磁铁,四个所述永磁铁沿所述转子本体的周向方向间隔均匀设置,且四个所述永磁铁的极性呈交替排列。
10.如权利要求9所述的跨介质机器人,其特征在于,所述安装面上均匀布置有多个安装槽,所述安装槽呈圆台型;
技术总结
本发明公开了一种跨介质机器人,涉及机器人技术领域,其中,该跨介质机器人包括机身、胸鳍和推进组件,机身设置有球形电机,胸鳍包括固定鳍条、连接鳍条和连接固定鳍条和连接鳍条的柔性片,固定鳍条设置于机身,连接鳍条与球形电机连接;球形电机能驱动连接鳍条运动,以收折或展开胸鳍,并调节胸鳍的俯仰角度,推进组件包括驱动件和尾鳍,尾鳍摆动地设置于机身的尾部,驱动件驱动尾鳍摆动。本发明提供的技术方案能够实现跨介质机器人水下高速仿生摆尾推进、空中展翅滑翔和水空姿态的自由调节。
技术研发人员:喻俊志,莘展骅,陈迪,孟岩,熊严,王博,仝茹
受保护的技术使用者:北京大学
技术研发日:
技术公布日:2025/3/18
- 还没有人留言评论。精彩留言会获得点赞!