基于集成底盘的车辆稳定性智能预期控制方法
本发明涉及数据处理,具体涉及数据处理中一种基于集成底盘的车辆稳定性智能预期控制方法。
背景技术:
1、随着汽车工业的不断进步,消费者对汽车性能的要求日益提高。现代汽车不仅需要具备良好的动力性和舒适性,车辆的运动稳定性也成为关键指标。传统的底盘系统在应对复杂路况和驾驶工况时逐渐暴露出局限性。例如,在高速行驶时遇到侧风或者紧急避让障碍物时,车辆很容易出现失控的情况。汽车电子技术的飞速发展为智能底盘的出现提供了技术支持。但是车辆在行驶过程中,尤其是在复杂路况(如湿滑路面、崎岖山路)或紧急驾驶情况(如紧急制动、突然转向)下,很容易失去控制。
技术实现思路
1、本发明的目的在于提供极限稳定性的智能预期控制方法,所采用的技术方案具体如下:
2、第一方面,本发明实施例提供了基于集成底盘的车辆稳定性智能预期控制方法,该方法包括:
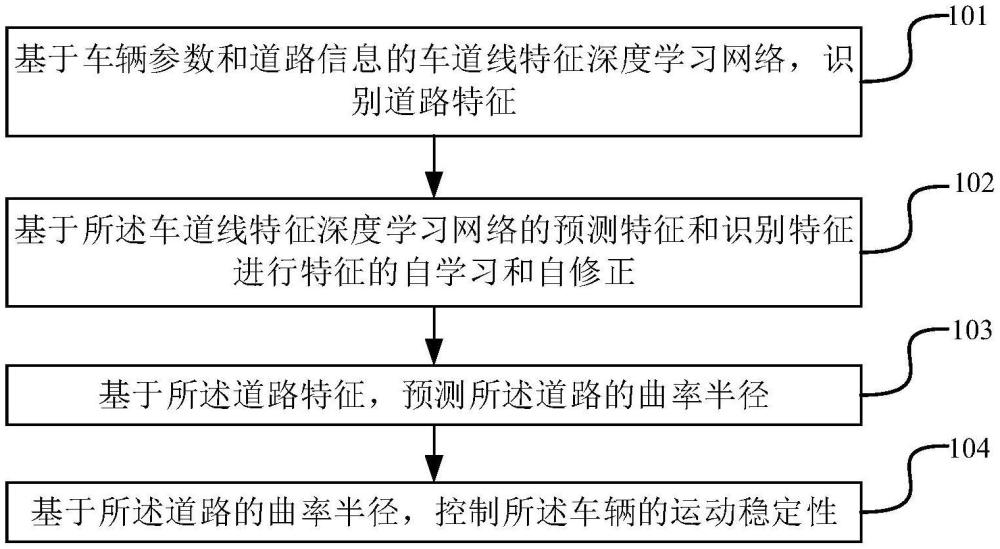
3、基于车辆参数和道路信息的车道线特征深度学习网络,识别道路特征;
4、基于所述车道线特征深度学习网络的预测特征和识别特征进行特征的自学习和自修正;
5、基于所述道路特征,预测所述道路的曲率半径;
6、基于所述道路的曲率半径,控制所述车辆的运动稳定性。
7、第二方面,提供了基于集成底盘的车辆稳定性智能预期控制系统,所述系统包括:
8、识别模块,用于基于车辆参数和道路信息的车道线特征深度学习网络,识别道路特征;
9、自学习模块,用于基于所述车道线特征深度学习网络的预测特征和识别特征进行特征的自学习和自修正;
10、预测模块,用于基于所述道路特征,预测所述道路的曲率半径;
11、控制模块,用于基于所述道路的曲率半径,控制所述车辆的运动稳定性。第三方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面所述任意一种可能的实现方式中的方法。
12、第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面所述任意一种可能的实现方式中的方法。
13、本发明具有如下有益效果:基于车辆参数和道路信息的车道线特征深度学习网络,识别道路特征;并基于所述车道线特征深度学习网络的预测特征和识别特征进行特征的自学习和自修正。这样,通过对道路信息进行车道线识别,从而能够准确预测道路中的多条车道,以便于精准实现车道线特征深度学习网络的自学习和自修正。之后,基于所述道路特征,预测所述道路的曲率半径;并基于所述道路的曲率半径,控制所述车辆的运动稳定性。如此,通过提取车辆的车辆参数以及道路特征,对未来行驶的路线进行提前的预测,以及反馈学习,从而对车道线特征深度学习网络进行自学习和自修正,能够提高曲率半径的准确度,进而能够准确控制车辆的运动稳定性。
技术特征:
1.基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于集成底盘的车辆稳定性智能预期控制方法包括:
2.根据权利要求1所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于所述车道线特征深度学习网络的预测特征和识别特征进行特征的自学习和自修正,包括:
3.根据权利要求2所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于所述曲率差值,对所述车道线特征深度学习网络进行特征的自学习和自修正,包括:
4.根据权利要求3所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于所述横摆角速度差值、所述侧偏角差值以及所述曲率差值,重新识别所述道路的车道不同网,以重新确定所述道路的预测曲率,直至所述曲率差值小于预设差值阈值,以完成对车道线特征深度学习网络进行特征的自学习和自修正,包括:
5.根据权利要求2所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述方法还包括:
7.根据权利要求2所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述方法还包括:
8.根据权利要求7所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于所述车辆参数,确定所述车辆在所述道路的下一弯道中的转弯半径和行驶路径,包括:
9.根据权利要求1所述的基于集成底盘的车辆稳定性智能预期控制方法,其特征在于,所述基于所述道路的曲率半径,控制所述车辆的运动稳定性。,包括:
10.基于集成底盘的车辆稳定性智能预期控制方法及系统,其特征在于,所述系统包括:
技术总结
本发明涉及数据处理技术领域,具体涉及基于集成底盘的车辆稳定性智能预期控制方法,该方法包括:基于车辆参数和道路信息的车道线特征深度学习网络;基于所述网络模型,识别所述道路特征;基于所述网络的预测特征和识别特征进行所述特征的自学习和自修正;基于所述道路特征,预测所述道路的曲率半径;基于所述道路曲率半径,控制所述车辆的运动稳定性。该方法通过提取车辆的车辆参数以及道路特征,对未来行驶的路线进行提前的预测,以及反馈学习,从而对曲率半径进行修正,能够提高曲率半径的准确度,进而能够准确控制车辆的运动稳定性。
技术研发人员:申水文,杜彭涛,洪汉池,王子睿,王嘉淇,谢欣君
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!