一种基于相对位移进行目标预测及补偿的ADB系统控制方法与流程
本发明属于车辆adb系统控制,具体涉及一种基于相对位移进行目标预测及补偿的adb系统控制方法。
背景技术:
1、夜间行车时,容易引起驾驶员眩目的因素主要有两种:对向来车时,远光灯直射;同向行驶时,反光镜的反光。严重的炫目会让驾驶员无法看清前方道路,造成很大的夜间行车隐患。
2、基于此,adb(adaptive driving beam, 自适应前照灯)系统通过检测前方行车状况,自动选择关闭引起驾驶员炫目区域的灯光,可在一定程度上降低夜间发生交通事故的频率。实际使用adb系统时,其控制灯光的准确性和实时性是实现此功能的关键部分。
3、当前,大部分adb系统仅依赖于设计系统的软件控制算法来提高识别区域的准确性及实时性,存在一定的局限性。
4、因此,为进一步提高adb系统的准确性和实时性,需要在adb系统软件控制算法的基础上,增加一些识别区域的补偿措施。
技术实现思路
1、本发明的目的在于提供一种基于相对位移进行目标预测及补偿的adb系统控制方法,以解决上述背景技术中提出的问题。本发明提供的一种基于相对位移进行目标预测及补偿的adb系统控制方法,具有提高控制分区led亮灭的准确度,达到目标车辆驾驶员防眩目的特点。
2、为实现上述目的,本发明提供如下技术方案:一种基于相对位移进行目标预测及补偿的adb系统控制方法,包括以下步骤:
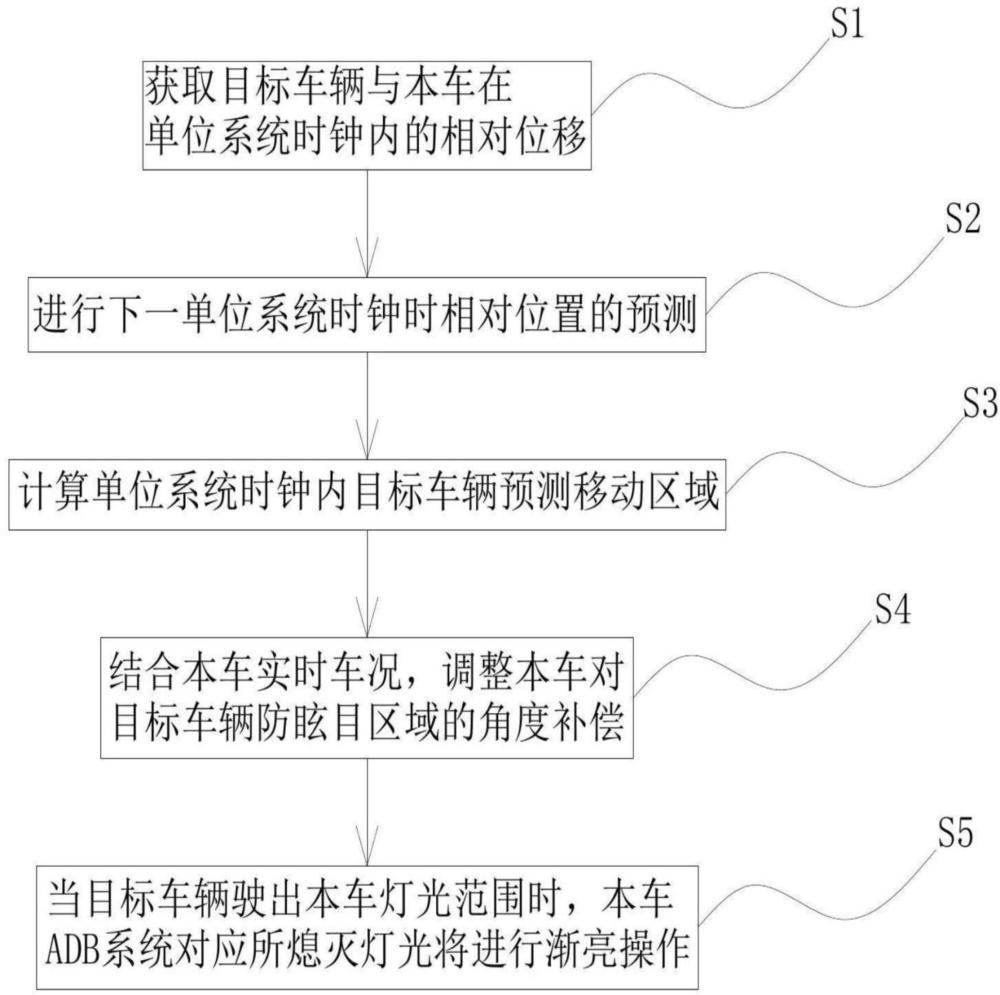
3、s1、获取目标车辆的数据,包括目标车辆id以及目标车辆与本车在单位系统时钟内的相对位移;
4、s2、依据步骤s1中目标车辆与本车在单位系统时钟内的相对位移,进行下一单位系统时钟时相对位置的预测;
5、s3、依据步骤s2中下一单位系统时钟时目标车辆的预测位置,计算单位系统时钟内目标车辆预测移动区域;
6、s4、结合本车实时车况,依据步骤s3中单位系统时钟内目标车辆预测移动区域,调整本车对目标车辆防眩目区域的角度补偿;
7、s5、当目标车辆驶出本车灯光范围时,本车adb系统对应所熄灭灯光将进行渐亮操作。
8、在本发明中进一步地,步骤s1中,目标车辆id用于区分不同的目标车辆,对每个目标车辆进行唯一的标识。
9、在本发明中进一步地,步骤s1中,目标车辆的id编码规则为:编码范围从0至255,id随目标车辆数叠加但不清除,当目标车辆驶出本车灯光范围后,目标车辆id失效,但计数不清除,下一辆目标车辆id在此基础叠加,超出255后下一目标车辆从0开始计数。
10、在本发明中进一步地,步骤s2中,下一单位系统时钟时相对位置的预测方法包括以下步骤:
11、s21、依据目标车辆与本车在单位系统时钟内的相对位移,计算出目标车辆对本车的相对距离的变化速度;
12、s22、依据当前时钟目标车辆对本车的相对距离的变化速度与当前时钟目标车辆位置的预测与当前时钟目标车辆实际位置之差,计算下一时钟目标车辆的预测位置。
13、在本发明中进一步地,步骤s21中,设目标车辆的位置信息每隔更新一次,第时刻的时间间隔表示为,其中,表示正整数;
14、计算时刻目标车辆对本车的相对距离的变化速度的公式为:
15、;
16、其中,表示时刻目标车辆相对于本车的实际距离,表示时刻,目标车辆相对于本车的实际距离。
17、在本发明中进一步地,步骤s22中,计算下一单位系统时钟时目标车辆的预测位置的公式为:
18、;
19、其中,为时刻目标车辆预测位置与时刻目标车辆实际位置之差,,。
20、在本发明中进一步地,步骤s3中,计算单位系统时钟内目标车辆预测移动区域的公式为:
21、。
22、在本发明中进一步地,步骤s3中,单位系统时钟内目标车辆预测移动区域为:相对于本车目标车辆从当前时钟运动至下一时钟的预测移动区域。
23、在本发明中进一步地,步骤s4中,依据目标车辆相对于本车的距离区间,角度补偿值设置有三种。
24、在本发明中进一步地,步骤s5中,当目标车辆驶出本车灯光范围时,本车adb系统对应所熄灭灯光保持1s熄灭的状态,随后以每50ms调亮5%直至恢复100%亮度;在渐亮过程中持续检测此区域是否存在其他目标车辆,若存在其他目标车辆,则立即熄灭此区域灯光,若不存在其他目标车辆,则继续进行渐亮。
25、与现有技术相比,本发明的有益效果是:
26、1、本发明通过对目标车辆进行id编号,可以更有效地管理多个目标,实现对目标的精准控制,避免目标车辆交叉行驶或进出视野导致目标混淆而产生的误判造成意外炫目。
27、2、本发明的id编号可用于记录每个目标的属性进行数据处理,通过id关联目标车辆类型、尺寸以及优先等级等,在进行目标预测时可以更高效地更新每个目标的状态。
28、3、本发明可实现控制策略优化,即根据目标的id分配不同的优先级,当视野出现多个目标重叠时,id可区分目标的主次矛盾,优先处理快速靠近的车辆。
29、4、本发明通过获取对当前时刻目标车辆位置的预测与当前时刻目标车辆实际位置之差,为计算下一时钟目标车辆的预测位置提供修正参数,提高了目标车辆位置预测的准确性。
30、5、本发明预测了目标车辆从当前时刻运动至下一时刻相较于本车所移动的区域,对移动区域所需本车adb系统熄灭的灯光分区进行角度补偿,且adb系统分区角度补偿具有可配置性,即依据不同车型adb系统的分区可进行角度补偿数值的调整,具有灵活性。
31、6、本发明通过划分三种目标车辆相对本车距离区间,对adb系统的led分区进行角度补偿,避免了距离实时变化带来的影响,在降低adb系统复杂度的同时,更好的实现防眩目功能。
32、7、本发明在目标车辆驶离出本车灯光的范围时,本车adb系统对应所熄灭灯光将进行渐亮操作,可以维持adb系统的稳定性,防止灯光突然恢复对随后目标车辆造成意外炫目。
技术特征:
1.一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s1中,目标车辆id用于区分不同的目标车辆,对每个目标车辆进行唯一的标识。
3.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s1中,目标车辆的id编码规则为:编码范围从0至255,id随目标车辆数叠加但不清除,当目标车辆驶出本车灯光范围后,目标车辆id失效,但计数不清除,下一辆目标车辆id在此基础叠加,超出255后下一目标车辆从0开始计数。
4.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s2中,下一单位系统时钟时相对位置的预测方法包括以下步骤:
5.根据权利要求4所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s21中,设目标车辆的位置信息每隔t更新一次,第n时刻的时间间隔表示为,其中,表示正整数;
6.根据权利要求5所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s22中,计算下一单位系统时钟时目标车辆的预测位置的公式为:
7.根据权利要求6所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s3中,计算单位系统时钟内目标车辆预测移动区域的公式为:
8.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s3中,单位系统时钟内目标车辆预测移动区域为:相对于本车目标车辆从当前时钟运动至下一时钟的预测移动区域。
9.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s4中,依据目标车辆相对于本车的距离区间,角度补偿值设置有三种。
10.根据权利要求1所述的一种基于相对位移进行目标预测及补偿的adb系统控制方法,其特征在于:所述步骤s5中,当目标车辆驶出本车灯光范围时,本车adb系统对应所熄灭灯光保持1s熄灭的状态,随后以每50ms调亮5%直至恢复100%亮度;在渐亮过程中持续检测此区域是否存在其他目标车辆,若存在其他目标车辆,则立即熄灭此区域灯光,若不存在其他目标车辆,则继续进行渐亮。
技术总结
本发明公开了一种基于相对位移进行目标预测及补偿的ADB系统控制方法,包括以下步骤:获取目标车辆的数据;依据目标车辆与本车在单位系统时钟内的相对位移,进行下一单位系统时钟时相对位置的预测;依据下一单位系统时钟时目标车辆的预测位置,计算单位系统时钟内目标车辆预测移动区域;依据单位系统时钟内目标车辆预测移动区域,调整本车对目标车辆防眩目区域的角度补偿;当目标车辆驶出本车灯光范围时,本车ADB系统对应所熄灭灯光将进行渐亮操作。本发明通过获取对当前时刻目标车辆位置的预测与当前时刻目标车辆实际位置之差,为计算下一时钟目标车辆的预测位置提供修正参数,提高了目标车辆位置预测的准确性。
技术研发人员:郭海龙,张彦峨,丁宗强,王子逸,李丽
受保护的技术使用者:浙江得邦车用照明有限公司
技术研发日:
技术公布日:2025/4/21
- 还没有人留言评论。精彩留言会获得点赞!