自行式混铁车在工艺铁路线上的定位方法和系统与流程
本发明涉及自行式混铁车定位,具体地,涉及自行式混铁车在工艺铁路线上的定位方法和系统。
背景技术:
1、目前工艺铁路轨道上存在多种运输设备,本发明在铁路运输设备进行应用,其中特别是在自动驾驶鱼雷罐车上进行应用。鱼雷罐车在铁钢车间铁水运输过程中有着广泛的应用,鱼雷罐车的利用效率和运输方式对铁水运输的温降和钢铁生产能耗与产品质量具有重要的影响。
2、鱼雷罐车,又名鱼雷型混铁车,是一种大型铁水运输设备,具有热损失小,保温时间长,节约能源等优点,它还可以储存铁水,以协调炼铁与炼钢临时出现的不平衡状态,同时,可替代炼钢的混铁炉和普通的铁水罐车,也可在铁水运输过程中完成脱硫、脱磷等操作工序。鱼雷罐车除了罐体外还有倾翻机构,一般有液压机构驱动,或者有电机减速机驱动。还有车体作为运输载体,还有加盖机构。如果运输距离大,则另设辅助加热系统。在工艺生产过程中,鱼雷罐车的使用简化了炼钢工艺,降低了热损失,同时由于其存储容量大,节约单次运输成本。
3、在工艺铁路线,车辆位置信息有着至关重要的作用。无论进行工艺铁路线自动驾驶,或者进行工艺铁路线车辆运行状态跟踪,均需要实时车辆位置信息,只有具有了实时的稳定可靠的位置信息,在铁路工艺线物流运输过程中才能进行各个车辆之间的时空交错调度,减少路段占用时间,提高运输效率。车辆自动驾驶过程中的位置控制系统,建立在稳定的定位信息的基础上,因此,轨道实时定位技术有着重要的意义。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种自行式混铁车在工艺铁路线上的定位方法和系统。
2、根据本发明提供的一种自行式混铁车在工艺铁路线上的定位系统,包括:
3、数据采集系统:进行传感器数据采集,然后进行数据信息汇总,在上位机系统进行编程;
4、数据预处理系统:将采集到的传感器数据进行数据筛选和数据预处理;
5、独立定位算法系统:通过各个独立的传感器,通过耦合方式形成组合定位导航系统;
6、定位信息融合系统:将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终产生对定位结果的一致性解释。
7、优选地,还包括:
8、冗余传感器系统:包括在不同地点设置的不同类型的传感器;
9、上位机系统,作为硬件支持对数据进行数据处理。
10、优选地,定位信息融合系统,将不确定处理和精确处理进行互补,在数据层面,特征层面和决策层面这些不同的层次进行信息互补;
11、数据层融合,是将采集的数据进行直接融合,保持原始的数据信息;
12、特征层融合,是将每个传感器的观测数据进行特征提取,得到独立的特征矢量,然后将特征适量进行综合判断;
13、决策层融合,是依据规则和准则进行决策计算。
14、优选地,所述冗余传感器系统,包括:
15、绝对地址定位系统;在所述绝对地址定位系统中,通过编码电缆和读写器组合的方式,实现非接触工作方式,进行连续的绝对位置定位,以电磁耦合的方式进行,编码尺定位系统通过在编码尺上进行编码,并结合光电传感器进行数据读取,实现毫米级别的定位;
16、激光测距定位系统:采用激光发射、接收器和反光板进行直线测距,将激光数据传输到数据采集系统;
17、rfid组合定位系统:采用射频识别技术,通过无线信号感应方式,进行离散目标识别;
18、gps组合导航定位系统:通过卫星导航定位系统和惯性测量装置组合导航,进行全天候、全区域覆盖的绝对位置定位系统;
19、激光视觉slam定位系统:通过即时定位和地图构造技术,采用激光和视觉,进行独立的定位,并在数据层,特征层和决策层进行数据融合,得到slam定位系统的定位结果。
20、优选地,在定位精度要求高,地面安装环境好的地方,采用绝对地址定位系统;
21、在现场空间不足,或者现场地面灰尘,落物等情况下,或者直线情况下,采用激光测距定位系统;
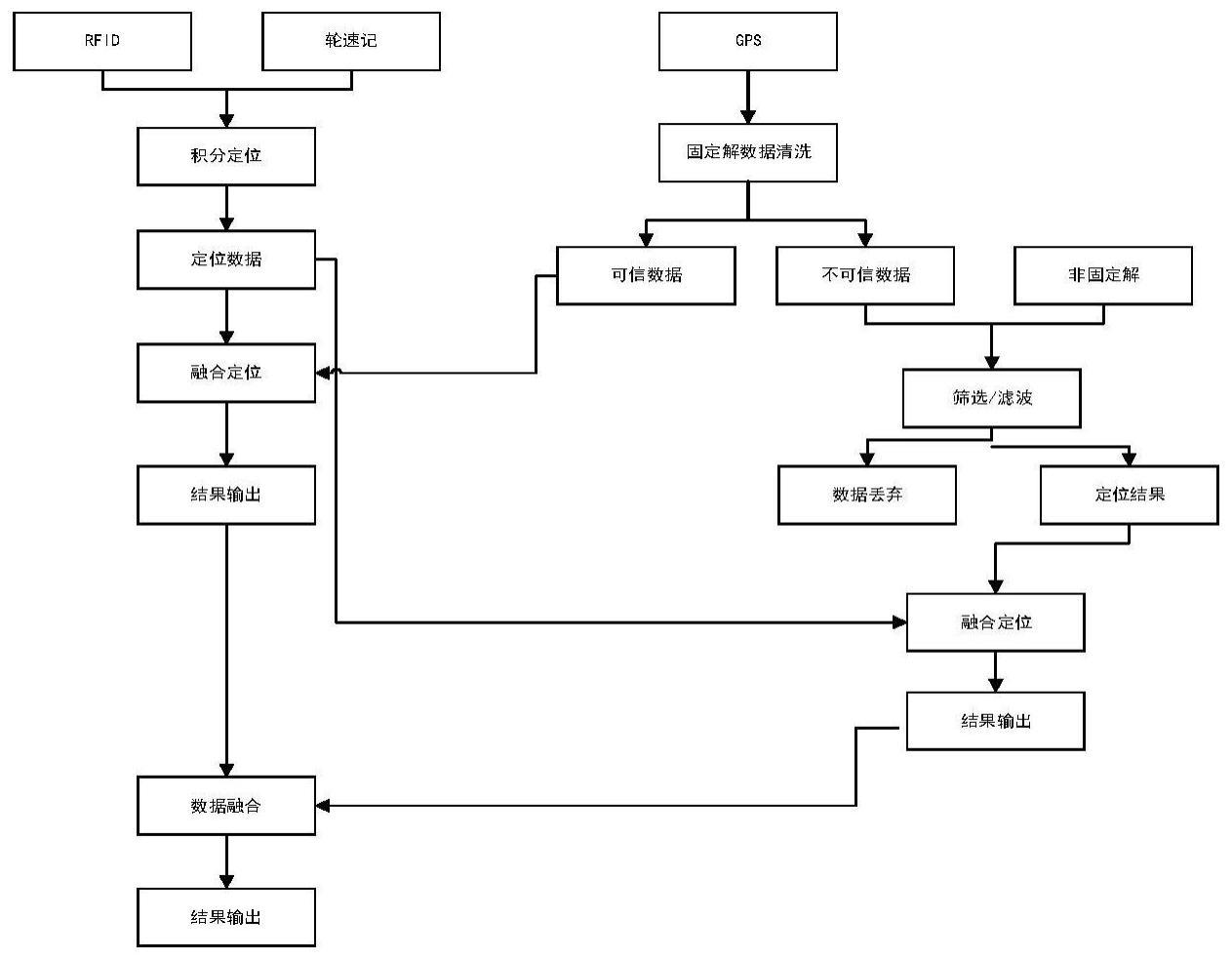
22、采用rfid标签进行离散定位,通过在轨道上部署rfid标签,同时结合车载轮速计,并结合轨道gps地图和转辙机这些铁路信息,将离散的定位识别码结合地图信息,进行位置解析,并通过转辙机、车辆轮速计信息,推算当前运行轨迹,最终得到连续定位数据;
23、在工艺铁路的开阔区域,采用gps组合导航系统进行绝对定位,采用基于卡尔曼滤波的最优估计方法,对gps和ins定位导航信息进行融合,得到导航解;gps防止惯性数据漂移,ins能在gps信号中断时提供位置、速度、姿态信息。
24、优选地,由于现场工艺存在遮挡,gps组合导航系统无法全时段进行定位时,slam无需接收卫星信号和激光,在已知设备的初始位置的条件下,在设备的运动过程中通过将观测到的特征与已建立的地图中的特征进行匹配,求取它们之间的差别,进而更新设备的位置的设备定位。
25、优选地,位置跟踪采用扩展卡尔曼滤波器来实现,其采用高斯分布来近似地表示设备位置的后验概率分布,其计算过程主要包括三步:首先是根据设备的运模型预测设备的位置,然后将观测信息与地图进行匹配,最后根据预测后的设备位置以及匹配的特征计算设备应该观测到的信息,并利用应该观测到的信息与实际观测到的信息之间的差距来更新设备的位置。
26、优选地,全局定位是在设备的初始位置不确定的条件下,利用局部的、不完全的观测信息估计设备的当前位置。
27、优选地,上位机系统通过工控机,嵌入式板卡,plc等方式进行硬件实现。
28、根据本发明提供的一种自行式混铁车在工艺铁路线上的定位方法,通过所述的自行式混铁车在工艺铁路线上的定位系统,对自行式混铁车进行定位。
29、与现有技术相比,本发明具有如下的有益效果:
30、1、本发明主要针对厂区内机车和鱼雷罐车以及smart tpc等项目,进行车辆位置跟踪,并基于车辆定位,进行自动驾驶,安全防护等功能。
31、2、本发明通过设计轨道定位系统,实现工艺铁路的设备定位功能,解决了轨道设备定位问题,为后续功能和项目实施提供基础。
32、3、本发明采用多传感器融合处理技术,通过多种独立的传感器系统,形成独立定位系统,并在决策层进行信息融合,得到最终可信的定位结果。
技术特征:
1.一种自行式混铁车在工艺铁路线上的定位系统,其特征在于,包括:
2.根据权利要求1所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,还包括:
3.根据权利要求1所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,定位信息融合系统,将不确定处理和精确处理进行互补,在数据层面,特征层面和决策层面这些不同的层次进行信息互补;
4.根据权利要求3所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,所述冗余传感器系统,包括:
5.根据权利要求4所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,在定位精度要求高,地面安装环境好的地方,采用绝对地址定位系统;
6.根据权利要求5所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,由于现场工艺存在遮挡,gps组合导航系统无法全时段进行定位时,slam无需接收卫星信号和激光,在已知设备的初始位置的条件下,在设备的运动过程中通过将观测到的特征与已建立的地图中的特征进行匹配,求取它们之间的差别,进而更新设备的位置的设备定位。
7.根据权利要求5所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,位置跟踪采用扩展卡尔曼滤波器来实现,其采用高斯分布来近似地表示设备位置的后验概率分布,其计算过程主要包括三步:首先是根据设备的运模型预测设备的位置,然后将观测信息与地图进行匹配,最后根据预测后的设备位置以及匹配的特征计算设备应该观测到的信息,并利用应该观测到的信息与实际观测到的信息之间的差距来更新设备的位置。
8.根据权利要求7所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,全局定位是在设备的初始位置不确定的条件下,利用局部的、不完全的观测信息估计设备的当前位置。
9.根据权利要求2所述的自行式混铁车在工艺铁路线上的定位系统,其特征在于,上位机系统通过工控机,嵌入式板卡,plc等方式进行硬件实现。
10.一种自行式混铁车在工艺铁路线上的定位方法,其特征在于,通过权利要求1至9中任一项所述的自行式混铁车在工艺铁路线上的定位系统,对自行式混铁车进行定位。
技术总结
本发明提供了一种自行式混铁车在工艺铁路线上的定位方法和系统,包括:进行传感器数据采集,然后进行数据信息汇总,在上位机系统进行编程;数据预处理系统:将采集到的传感器数据进行数据筛选和数据预处理;独立定位算法系统:通过各个独立的传感器,通过耦合方式形成组合定位导航系统;定位信息融合系统:将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终产生对定位结果的一致性解释。本发明进行车辆位置跟踪,并基于车辆定位,进行自动驾驶,安全防护等功,实现工艺铁路的设备定位功能,解决了轨道设备定位问题,为后续功能和项目实施提供基础。
技术研发人员:张金聪,陶钧,胡佳溪,李运荣,张宇涵,李岷
受保护的技术使用者:上海宝信软件股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!