一种面向自动驾驶的移动动作预判系统及方法与流程
本发明涉及自动驾驶,具体为一种面向自动驾驶的移动动作预判系统及方法。
背景技术:
1、自动驾驶系统系统采用先进的通信、计算机、网络和控制技术,对列车实现实时、连续控制。采用现代通信手段,直接面对列车,可实现车地间的双向数据通信,传输速率快,信息量大,后续追踪列车和控制中心可以及时获知前行列车的确切位置,使得运行管理更加灵活,控制更为有效,更加适应列车自动驾驶的需求。自动驾驶是完全自动化的、高度集中控制的列车运行系统。自动驾驶系统具备列车自动唤醒启动和休眠、自动出入停车场、自动清洗、自动行驶、自动停车、自动开关车门、故障自动恢复等功能,并具有常规运行、降级运行、运行中断等多种运行模式。实现全自动运营可以节省能源,优化系统能耗和速度的合理匹配。自动驾驶系统要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平.20世纪90年代以来,随着通信、控制和网络技术的发展,可以在地车之间实现大容量、双向的信息传输,为高密度、大运量的地铁系统成为真正意义上的自动驾驶系统提供了可能,在自动驾驶中,对车辆的静止障碍物的判断以及很成熟,但是对于动态的障碍物,例如车辆在行驶中,突然撞到移动的动物等情况时,针对移动的障碍物,就需要一种面向自动驾驶的移动动作预判系统及方法。
技术实现思路
1、本发明的目的在于提供一种面向自动驾驶的移动动作预判系统及方法,本发明自动化程度高,稳定运行、准确度高、检测量大,能快速的检测出移动障碍物并输出相关信息指令给车身控制系统,以做出相应的安全动作。
2、本发明是这样实现的:
3、本发明提供一种面向自动驾驶的移动动作预判系统,包括设在车辆各个位置的多个摄像机、传感器,和与多个摄像机传感器连接的控制处理器;所述控制处理器连接有存储单元、预判提醒装置和应急避让信息输出接口。通过应急避让信息输出接口连接汽车的电子制动力分配系统、车身电子稳定系统、电控四轮转向系统、碰撞警示和预防系统、和车联网系统;所述预判提醒装置包括安装在车内控制台上的触控显示屏和扬声器。
4、本发明提供一种一种面向自动驾驶的移动动作预判方法,具体按以下步骤执行:
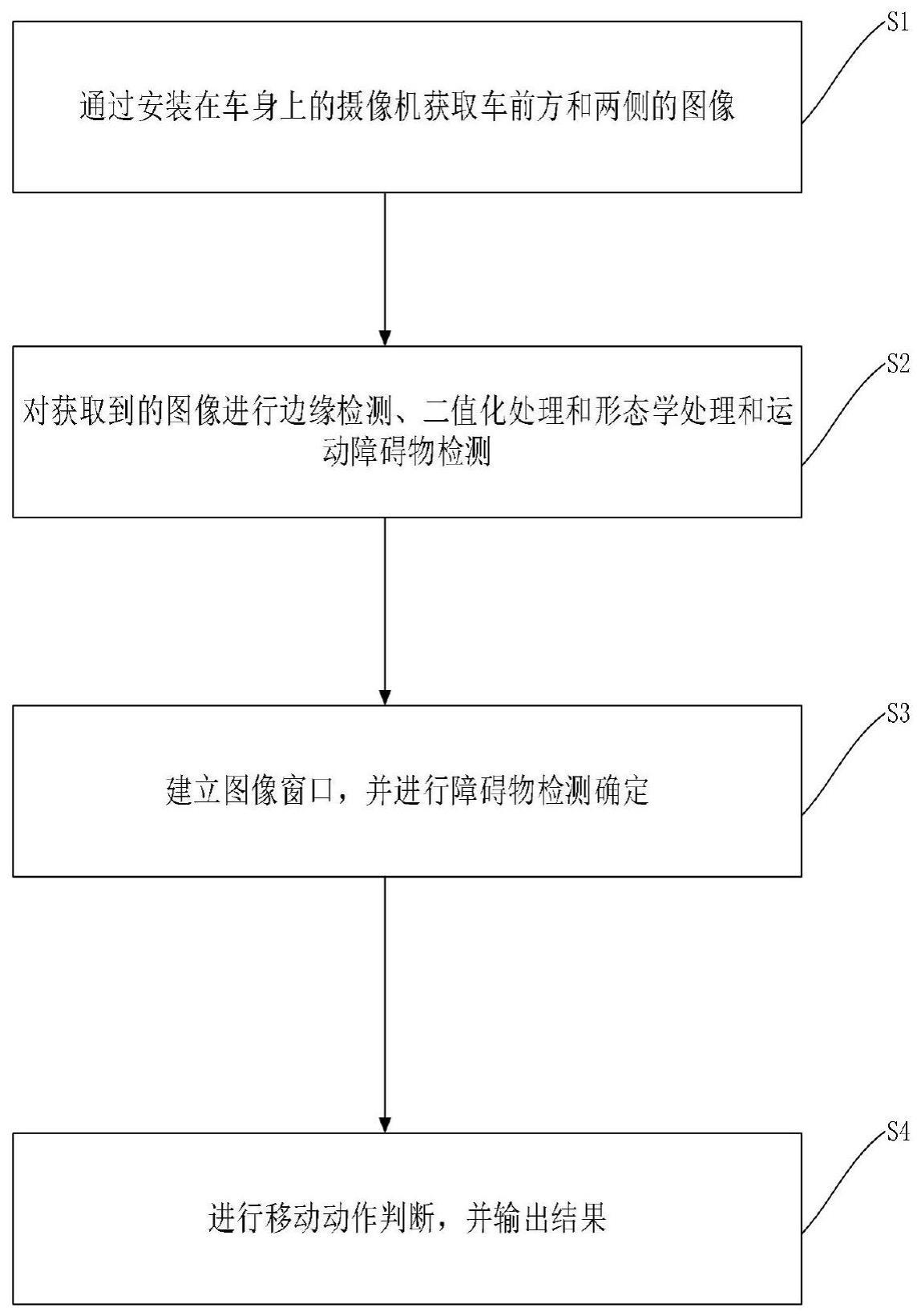
5、s1:通过安装在车身上的摄像机获取车前方和两侧的图像;
6、s2:对获取到的图像进行边缘检测、二值化处理和形态学处理和运动障碍物检测;
7、s3:建立图像窗口,并进行障碍物检测确定;具体按以下步骤执行:
8、s3.1:首先进行建立图像窗口,进行灰度直方图进行特征分析;
9、s3.2:对直方图像进行窗口边缘检测;
10、s3.3:对图像窗口进行投影处理;并确定障碍物的位置。
11、s4:进行移动动作判断,并输出结果;
12、具体按以下步骤执行:
13、s4.1:对障碍物进行计算相邻帧光流;
14、s4.2:补偿相邻帧抖动;
15、s4.3:估计车身运动倾角;
16、s4.4:从补偿后的光流场中检测车身运动方向与运动障碍物的位置关系,出现重叠或即将发生重叠则进行预警。
17、进一步,在步骤s2中,首先对图像的每一个像素点取领域s,计算领域内的灰度平均值,用此平均值代替该像素点的灰度值,如式(1);
18、
19、其中,s表示选好的领域,m表示领域内像素点的个数;
20、再进行滤波和边缘化提取,选育一个灰度值阈值,利用阈值把所有灰度值置0或1。
21、利用阈值进行将灰度值置0或1,首先计算出图像的最大和最小灰度值,令k=0,其中tk为阈值初置,如式(2);
22、
23、根据阈值t0把图像分割成两部分区域,再对两部分分别求灰度平均值;如式(3)-式(4);
24、
25、
26、其中,n(x,y)为像素(x,y)的权重系数,z(x,y)是图像像素(x,y)的灰度值。
27、进一步,在步骤s4.4中,利用hprn-schunck法进行光流场检测计算。
28、本发明提供一种计算机可读存储介质,存储介质存储有计算机程序,所述计算机程序被主控制器执行时实现如上述的任一项所述的方法。
29、与现有技术相比,本发明的有益效果是:
30、1自动化程度高,稳定运行、准确度高、检测量大,能快速的检测出移动障碍物并输出相关信息指令给车身控制系统,以做出相应的安全动作。
技术特征:
1.一种面向自动驾驶的移动动作预判系统,其特征在于:包括设在车辆各个位置的多个摄像机、传感器,和与多个摄像机传感器连接的控制处理器;
2.根据权利要求1所述的一种面向自动驾驶的移动动作预判系统,其特征在于,通过应急避让信息输出接口连接汽车的电子制动力分配系统、车身电子稳定系统、电控四轮转向系统、碰撞警示和预防系统、和车联网系统;
3.一种面向自动驾驶的移动动作预判方法,其特征在于,具体按以下步骤执行:
4.根据权利要求3所述的一种面向自动驾驶的移动动作预判系统及方法,其特征在于,在步骤s3中,具体按以下步骤执行:
5.根据权利要求3所述的一种面向自动驾驶的移动动作预判系统及方法,其特征在于,在步骤s4中,具体按以下步骤执行:
6.根据权利要求3所述的一种面向自动驾驶的移动动作预判系统及方法,其特征在于,在步骤s2中,首先对图像的每一个像素点取领域s,计算领域内的灰度平均值,用此平均值代替该像素点的灰度值,如式(1);
7.根据权利要求6所述的一种面向自动驾驶的移动动作预判系统及方法,其特征在于,
8.根据权利要求5所述的一种面向自动驾驶的移动动作预判系统及方法,其特征在于,在步骤s4.4中,利用hprn-schunck法进行光流场检测计算。
9.一种计算机可读存储介质,存储介质存储有计算机程序,其特征在于,所述计算机程序被主控制器执行时实现如上述权利要求1-8中的任一项所述的方法。
技术总结
本发明涉及设备监控技术领域,公开了一种面向自动驾驶的移动动作预判系统及方法,包括设在车辆各个位置的多个摄像机、传感器,和与多个摄像机传感器连接的控制处理器;所述控制处理器连接有存储单元、预判提醒装置和应急避让信息输出接口。通过应急避让信息输出接口连接汽车的电子制动力分配系统、车身电子稳定系统、电控四轮转向系统、碰撞警示和预防系统、和车联网系统。通过安装在车身上的摄像机获取车前方和两侧的图像;对获取到的图像进行边缘检测、二值化处理和形态学处理和运动障碍物检测;建立图像窗口,并进行障碍物检测确定;进行移动动作判断,并输出结果。本发明自动化程度高,稳定运行、准确度高。
技术研发人员:何建平
受保护的技术使用者:苏州博慧智实物联网科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!