一种虚拟联挂列车运动状态的感知系统的制作方法
本发明涉及虚拟联挂列车领域,尤其涉及一种虚拟联挂列车运动状态的感知系统。
背景技术:
1、虚拟联挂列车编组运行时,需要实时获取前车运动学参数信息,包括:位置、相对距离及相对速度等,并基于这些运动学参数信息进行整个列车编队的协同控制,以保障列车运行时的安全和效率。因此,设置一种虚拟联挂列车运动状态的感知系统,具有十分重要的意义。
技术实现思路
1、本发明提供了一种,用于实时获取前序列车的运动参数,从而追踪前序列车,以及在前序列车建立编组运行时对整个列车编组进行协同控制,保障虚拟联挂列车运行的安全性。
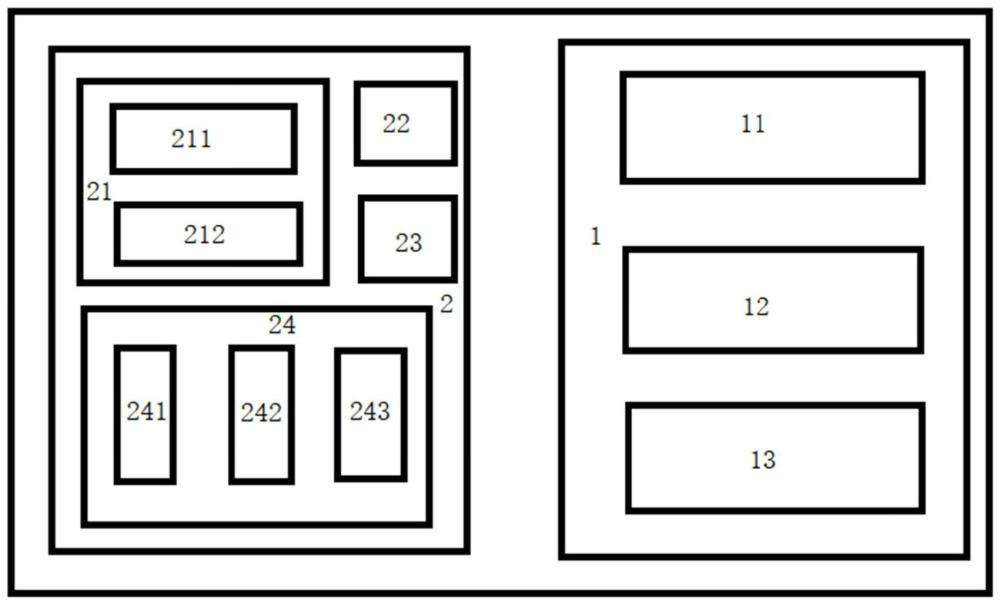
2、本发明提供了一种虚拟联挂列车运动状态的感知系统,包括:在当前列车电连接的集成式主机和功能模块,以及安装于前序列车的rfid标签;所述功能模块包括:摄像机模组、雷达模组、惯性测量模组和rfid天线;
3、所述摄像机模组,用于识别所述前序列车;
4、所述雷达模组,用于测量当前列车的实时速度;以及,测量在和所述前序列车联挂建立编组运行时的相对距离;以及,测量在和所述前序列车联挂建立编组运行时,所述前序列车和所述当前列车的相对速度;
5、所述惯性测量模组,用于获取所述当前列车的径向加速度;
6、所述集成式主机,用于基于所述当前列车的所述实时速度和所述径向加速度,和所述前序列车联挂建立编组运行;以及基于和所述前序列车联挂建立编组运行时的相对距离,以及所述前序列车和所述当前列车的相对速度,通过所述rfid天线,结合安装于所述前序列车的所述rfid标签,实现对所述前序列车的跟踪。
7、可选地,所述摄像机模组包括:长焦摄像机和短焦摄像机;
8、所述长焦摄像机,用于获取超出所在列车预设距离的前序列车目标;
9、所述短焦摄像机,用于在和所述前序列车联挂建立编组运行时,补偿铁路曲线引起的视野变化。
10、可选地,所述雷达模组包括:二次雷达、激光雷达、毫米波雷达:
11、所述激光雷达,用于确定所述当前列车的速度状态,并在所述速度状态为低速状态时,测量所述当前列车的实时速度;以及在和所述前序列车联挂建立编组运行时,按照10hz的频率持续获取所述前序列车与所述当前列车的实时距离;
12、毫米波雷达,用于对所述前序列车与本车的相对速度测量和本车自身绝对速度的测量;
13、所述二次雷达,用于基于所述rfid标签和所述rfid天线,确定预设距离之外的同轨道前序列车的目标捕获和测距。
14、可选地,所述集成式主机包括:cpu处理器、gpu处理器和通信接口板;
15、所述cpu处理器,用于采用预设算法,基于所述相对距离和所述相对速度,对所述前序列车的运动状态进行预测,得到预测结果,并根据所述预测结果跟踪所述前序列车;
16、所述gpu处理器,用于匹配所述摄像机模组所获取的图像信息及所述雷达模组所获取的运动状态数据;
17、所述通信接口板,用于为所述功能单元提供数据接口。
18、可选地,所述激光雷达具体用于:判断所述当前列车的实时速度是否小于10km/h,若是,则确定所述当前列车的速度状态为低速状态。
19、可选地,所述激光雷达还具体用于:
20、通过获取在所述低速状态下的所述当前列车在预设测量周期的相对位置变化数据,确定所述当前列车的所述实时速度。
21、可选地,所述激光雷达还具体用于:在和所述前序列车联挂建立编组运行时,按照预先设定的获取频率,持续获取所述前序列车与所述当前列车的测距信息。
22、可选地,所述预先设定的获取频率为10hz。
23、可选地,所述cpu处理器具体用于:根据所述预测结果,采用单目标跟踪方式跟踪所述前序列车。
24、可选地,所述预设算法为卡尔曼滤波算法。
25、从以上技术方案可以看出,本发明具有以下优点:
26、本发明提供了一种虚拟联挂列车运动状态的感知系统,包括:在当前列车电连接的集成式主机和功能模块,以及安装于前序列车的rfid标签;所述功能模块包括:摄像机模组、雷达模组、惯性测量模组和rfid天线;所述摄像机模组,用于识别所述前序列车;所述雷达模组,用于测量当前列车的实时速度;以及,测量在和所述前序列车联挂建立编组运行时的相对距离;以及,测量在和所述前序列车联挂建立编组运行时,所述前序列车和所述当前列车的相对速度;所述惯性测量模组,用于获取所述当前列车的径向加速度;所述集成式主机,用于基于所述当前列车的所述实时速度和所述径向加速度,和所述前序列车联挂建立编组运行;以及基于和所述前序列车联挂建立编组运行时的相对距离,以及所述前序列车和所述当前列车的相对速度,通过所述rfid天线,结合安装于所述前序列车的所述rfid标签,实现对所述前序列车的跟踪。
27、基于雷达模组和惯性测量模组,实时获取的虚拟联挂列车中前序列车的运动参数,然后在集成式主机的协助下追踪前序列车,以及在前序列车建立编组运行时对整个列车编组进行协同控制,从而保障虚拟联挂列车运行的安全性,提成虚拟联挂列车运行的效率。
技术特征:
1.一种虚拟联挂列车运动状态的感知系统,其特征在于,包括:在当前列车电连接的集成式主机和功能模块,以及安装于前序列车的rfid标签;所述功能模块包括:摄像机模组、雷达模组、惯性测量模组和rfid天线;
2.根据权利要求1所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述摄像机模组包括:长焦摄像机和短焦摄像机;
3.根据权利要求1所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述雷达模组包括:二次雷达、激光雷达、毫米波雷达:
4.根据权利要求3所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述集成式主机包括:cpu处理器、gpu处理器和通信接口板;
5.根据权利要求3所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述激光雷达具体用于:判断所述当前列车的实时速度是否小于10km/h,若是,则确定所述当前列车的速度状态为低速状态。
6.根据权利要求5所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述激光雷达还具体用于:
7.根据权利要求6所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述激光雷达还具体用于:在和所述前序列车联挂建立编组运行时,按照预先设定的获取频率,持续获取所述前序列车与所述当前列车的测距信息。
8.根据权利要求7所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述预先设定的获取频率为10hz。
9.根据权利要求4所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述cpu处理器具体用于:根据所述预测结果,采用单目标跟踪方式跟踪所述前序列车。
10.根据权利要求9所述的虚拟联挂列车运动状态的感知系统,其特征在于,所述预设算法为卡尔曼滤波算法。
技术总结
本申请提供的一种虚拟联挂列车运动状态的感知系统,包括:在当前列车电连接的集成式主机和功能模块,以及安装于前序列车的RFID标签;所述功能模块包括:摄像机模组、雷达模组、惯性测量模组和RFID天线。系统基于雷达模组和惯性测量模组,实时获取的虚拟联挂列车中前序列车的运动参数,然后在集成式主机的协助下追踪前序列车,以及在前序列车建立编组运行时对整个列车编组进行协同控制,从而保障虚拟联挂列车运行的安全性,提成虚拟联挂列车运行的效率。
技术研发人员:张平,丁驰,蒋国涛,杨卫峰,吕浩炯,谢喆,陈凯,加玉涛,皮志超,曾祥
受保护的技术使用者:株洲中车时代电气股份有限公司
技术研发日:
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!