列车保护区段配置方法及装置与流程
本发明涉及列车安全控制,尤其涉及一种列车保护区段配置方法及装置。
背景技术:
1、在基于通信的列车控制(communication based train control,cbtc)模式下,通常会在列车停车点外方设置多段轨道区段作为进路的保护区段(overlap),以实现轨道交通运营控制系统的过冲保护。
2、现有技术中,为了便于工程方案的配置与实现,保护区段的长度以固定形式配置在联锁表中,从而计算机联锁可以根据联锁表实现列车进路安全防护,在不同的列车运行线路上设置保护区段时需要人工多次读取联锁表中的保护区段的长度信息,自动化程度低,灵活性差,导致轨道系统运营效率低。
技术实现思路
1、本发明提供一种列车保护区段配置方法及装置,用以解决现有技术在不同的列车运行线路上设置保护区段时需要人工多次读取联锁表中的保护区段的长度信息,自动化程度低,灵活性差,导致轨道系统运营效率低,提高了列车制动过程的安全性。
2、本发明提供一种列车保护区段配置方法,应用于列车自动驾驶系统ato,包括:
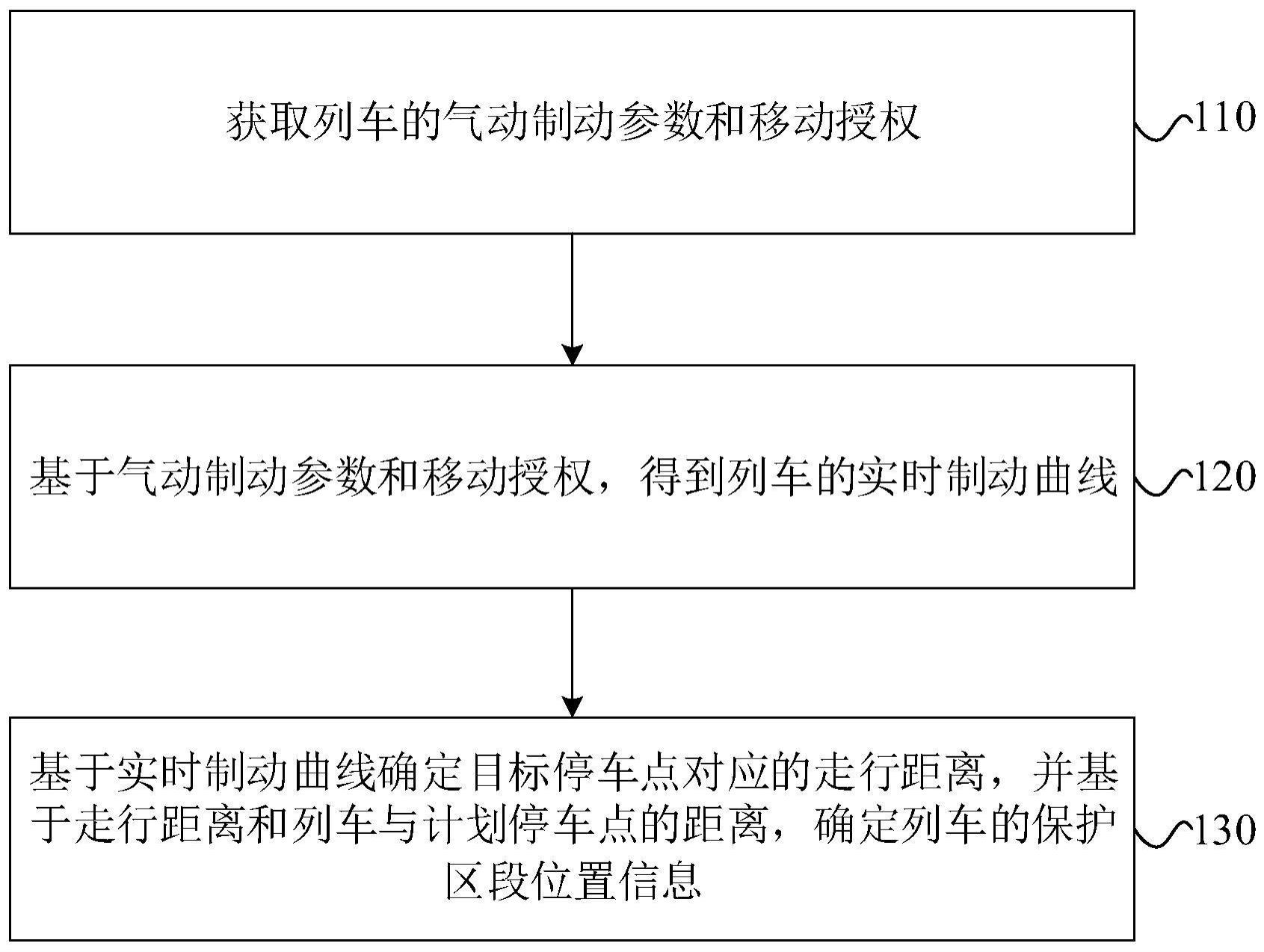
3、获取列车的气动制动参数和移动授权,所述气动制动参数包括所述列车的速度余量、列车自动保护系统atp与气动制动系统的隔离阀的通信延时、ato分别与气动制动系统的离心风机和排气阀的通信延时以及所述隔离阀、所述离心风机和所述排气阀分别对应的关闭延时;
4、基于所述气动制动参数和移动授权,得到所述列车的实时制动曲线,所述实时制动曲线用于表示所述列车的运行速度和列车行驶位置的映射关系,所述实时制动曲线用于计算列车在撞线后的走行距离;
5、基于所述实时制动曲线确定目标停车点对应的走行距离,并基于所述走行距离和所述列车与计划停车点的距离,得到所述列车的保护区段位置信息。
6、根据本发明提供的一种列车保护区段配置方法,所述获取列车的气动制动参数和移动授权,包括:
7、接收区域控制器zc发送的移动授权;
8、在列车制动的情况下,向所述离心风机发送第一制动指令,得到所述ato与所述离心风机的通信延时和所述离心风机的关闭延时,向所述排气阀发送第二制动指令,得到所述ato与所述排气阀的通信延时和所述排气阀的关闭延时,向所述atp发送第三制动指令,得到所述atp与所述隔离阀的通信延时和所述隔离阀的关闭延时,并根据列车速度余量表获取当前时刻的速度余量;
9、其中,所述第一制动指令用于指示所述离心风机关闭,所述第二制动指令用于指示所述排气阀关闭,所述第三制动指令用于指示所述atp基于列车的行驶路径和所述移动授权的范围控制所述隔离阀关闭。
10、根据本发明提供的一种列车保护区段配置方法,所述基于所述实时制动曲线确定目标停车点对应的走行距离,并基于所述走行距离和所述列车与计划停车点的距离,得到所述列车的保护区段位置信息,包括:
11、基于安全制动模型和所述实时制动曲线上任意一点在不同通信延时下对应的速度变化信息,得到所述列车在撞线情况下的走行距离;
12、基于所述列车在撞线情况下的走行距离和所述列车与所述计划停车点的距离的差值,得到所述列车的保护区段位置信息。
13、根据本发明提供的一种列车保护区段配置方法,在所述接收区域控制器zc发送的移动授权之后,且在所述在列车制动的情况下,向所述离心风机发送第一制动指令之前,所述方法还包括:
14、在列车启动的情况下,向所述离心风机发送第一启动指令,向所述排气阀发送第二启动指令,向所述atp发送第三启动指令;所述第一启动指令用于指示所述离心风机向列车的预制箱梁的腹腔鼓风,所述第二启动指令用于指示所述排气阀打开,所述第三启动指令用于指示所述atp基于列车的行驶路径和所述移动授权的范围控制所述隔离阀打开。
15、根据本发明提供的一种列车保护区段配置方法,所述基于安全制动模型和所述实时制动曲线上任意一点在不同通信延时下对应的速度变化信息,得到所述列车在撞线情况下的走行距离,包括:
16、基于所述任意一点对应的列车初始速度、测速误差和目标通信延迟时间得到所述列车的实际制动速度,所述目标通信延迟时间为atp与隔离阀的通信延时、ato分别与气动制动系统的离心风机和排气阀的通信延时以及隔离阀、离心风机和排气阀分别对应的关闭延时中的至少一项;
17、按照所述安全制动模型计算列车以所述实际制动速度在制动时间内的行驶距离,得到所述列车在撞线情况下的走行距离。
18、本发明还提供一种列车保护区段配置装置,包括:
19、获取模块,用于获取列车的气动制动参数和移动授权,所述气动制动参数包括所述列车的速度余量、列车自动保护系统atp与气动制动系统的隔离阀的通信延时、ato分别与气动制动系统的离心风机和排气阀的通信延时以及所述隔离阀、所述离心风机和所述排气阀分别对应的关闭延时;
20、第一处理模块,用于基于所述气动制动参数和移动授权,得到所述列车的实时制动曲线,所述实时制动曲线用于表示所述列车的运行速度和列车行驶位置的映射关系,所述实时制动曲线用于计算列车在撞线后的走行距离;
21、第二处理模块,用于基于所述实时制动曲线确定目标停车点对应的走行距离,并基于所述走行距离和所述列车与计划停车点的距离,得到所述列车的保护区段位置信息。
22、根据本发明提供的一种列车保护区段配置装置,
23、所述第二处理模块具体用于,基于安全制动模型和所述实时制动曲线上任意一点在不同通信延时下对应的速度变化信息,得到所述列车在撞线情况下的走行距离;基于所述列车在撞线情况下的走行距离和所述列车与所述计划停车点的距离的差值,得到所述列车的保护区段位置信息。
24、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述列车保护区段配置方法。
25、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述列车保护区段配置方法。
26、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述列车保护区段配置方法。
27、本发明提供的列车保护区段配置方法及装置,通过获取的列车气动制动参数和移动授权确定列车的实时制动曲线,再根据实时制动曲线上目标停车点对应的走行距离和列车与计划停车点的距离,得到列车的保护区段位置信息,能够根据列车实时制动位置获取自动获取保护区段,提高了信号系统的自动化运行效率和列车制动过程的安全性。
技术特征:
1.一种列车保护区段配置方法,应用于列车自动驾驶系统ato,其特征在于,包括:
2.根据权利要求1所述的列车保护区段配置方法,其特征在于,所述获取列车的气动制动参数和移动授权,包括:
3.根据权利要求1所述的列车保护区段配置方法,其特征在于,所述基于所述实时制动曲线确定目标停车点对应的走行距离,并基于所述走行距离和所述列车与计划停车点的距离,得到所述列车的保护区段位置信息,包括:
4.根据权利要求2所述的列车保护区段配置方法,其特征在于,在所述接收区域控制器zc发送的移动授权之后,且在所述在列车制动的情况下,向所述离心风机发送第一制动指令之前,所述方法还包括:
5.根据权利要求3所述的列车保护区段配置方法,其特征在于,所述基于安全制动模型和所述实时制动曲线上任意一点在不同通信延时下对应的速度变化信息,得到所述列车在撞线情况下的走行距离,包括:
6.一种列车保护区段配置装置,其特征在于,包括:
7.根据权利要求6所述的列车保护区段配置装置,其特征在于,
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至5任一项所述列车保护区段配置方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述列车保护区段配置方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述列车保护区段配置方法。
技术总结
本发明提供一种列车保护区段配置方法及装置,该列车保护区段配置方法包括:获取列车的气动制动参数和移动授权;基于气动制动参数和移动授权,得到列车的实时制动曲线;基于实时制动曲线确定目标停车点对应的走行距离,并基于走行距离和列车与计划停车点的距离,得到列车的保护区段位置信息。本发明所述方法能够根据列车实时制动位置获取自动获取保护区段,提高了信号系统的自动化运行效率和列车制动过程的安全性。
技术研发人员:陈康文,梁欣朝,朱晨,卫亮,刘伟,代继龙,李兆龄,焦凤霞
受保护的技术使用者:通号城市轨道交通技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!