基于视觉识别的列车定位测速系统、方法、设备及介质与流程
本发明涉及列车信号控制系统,尤其是涉及一种基于视觉识别的列车定位测速系统、方法、设备及介质。
背景技术:
1、在轨道交通信号行业,对列车位置和速度的测定是实现对列车控制的基础。目前常用的方法有速度传感器和信标定位法,雷达测距法等。
2、基于速度传感器的定位,通过对与车轮同步的齿轮齿数的计数来实现速度的测定,从而得到列车的速度,再推算出列车的位置。但是在列车车轮存在空转打滑等影响,并不能完全等同于列车的行驶速度,从而导致误差。并且这个误差会累积,所以需要通过固定在地面的信标来修正。信标是一种非接触式的信号收发装置,负责传输固定的信息(无源信标)或者可变的信息(有源信标)。在列车头的底部安装有信标天线,在经过信标上方的时候,信标被激活,车辆和信标进行了信息交互。因信标是安装在轨道中的固定位置,因此在线路地图上是固定的节点,车辆可以通过信息交互,确定自己此时到达了该位置,从而实现了在线路上定位。但是如果要实现精确定位,信标的布设要很密集,信标的价格高,导致这个方案的整体成本很高。
3、雷达测距法使用毫米波雷达。在列车头安装雷达,行驶中对前方的固定物体发射雷达波,检测雷达回波的频率变化,基于多普勒原理,可以推算出列车的运行速度,进而推算列车的位置。但是列车行驶区中,能在前进方向产生回波的固定物体比较少,杂波比较多,对速度的推算产生干扰,速度计算不稳定。而且如果没有辅助修正的功能,在轨道上特定位置对计算得到的位置进行矫正的话,很容易对定位产生累积误差。
4、经过检索中国专利公开号cn111114593a公开了一种基于多元信息融合的地铁列车自主定位装置、系统及方法,具体公开了包括惯导设备,用于对地铁列车进行自主导航定位,计算惯导定位信息;视觉设备,用于监测设置在地铁线路轨旁固定位置的图像信标,计算视觉定位信息;数据处理设备,用于接收惯导设备和视觉设备的上报信息,进行信息融合,得到融合定位信息;虽然该现有专利也公开了采用视觉设备来实现定位,但是其采用双目摄像头实现成本高,同时对于具体的测距过程并未涉及,对于二维码信息也未进行编码防护,存在安全隐患。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于视觉识别的列车定位测速系统、方法、设备及介质,能实现更经济、更高效、更高精度的测速定位。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种基于视觉识别的列车定位测速系统,该系统包括:
4、带二维码的里程标牌,按照设定距离布设在轨道旁;
5、摄像头,用于采集里程标牌上的二维码图像;
6、安全主机,与摄像头连接,用于将摄像头采集的二维码图像进行解析,识别前方的里程标牌,并利用二维码上的定位用图案,经过测距算法计算,得到车辆到达前方里程标牌的距离。
7、作为优选的技术方案,所述的二维码中包括以下信息:对应里程标牌信息以及用于里程标牌信息完整性校验的校验信息。
8、作为优选的技术方案,所述的二维码中信息通过加密算法加密后印制在里程标牌上。
9、作为优选的技术方案,所述的二维码的大小全线固定,统一为m厘米×m厘米,其中m的取值综合考虑线路中标牌之间最大间隔、使用的镜头焦距、镜头光学分辨率和车辆最大速度。
10、作为优选的技术方案,所述系统还包括与安全主机连接的配置文件存储盘,该配置文件存储盘储存有供安全主机使用的电子地图,该电子地图中录入有每个里程标牌在整条线路中的位置信息。
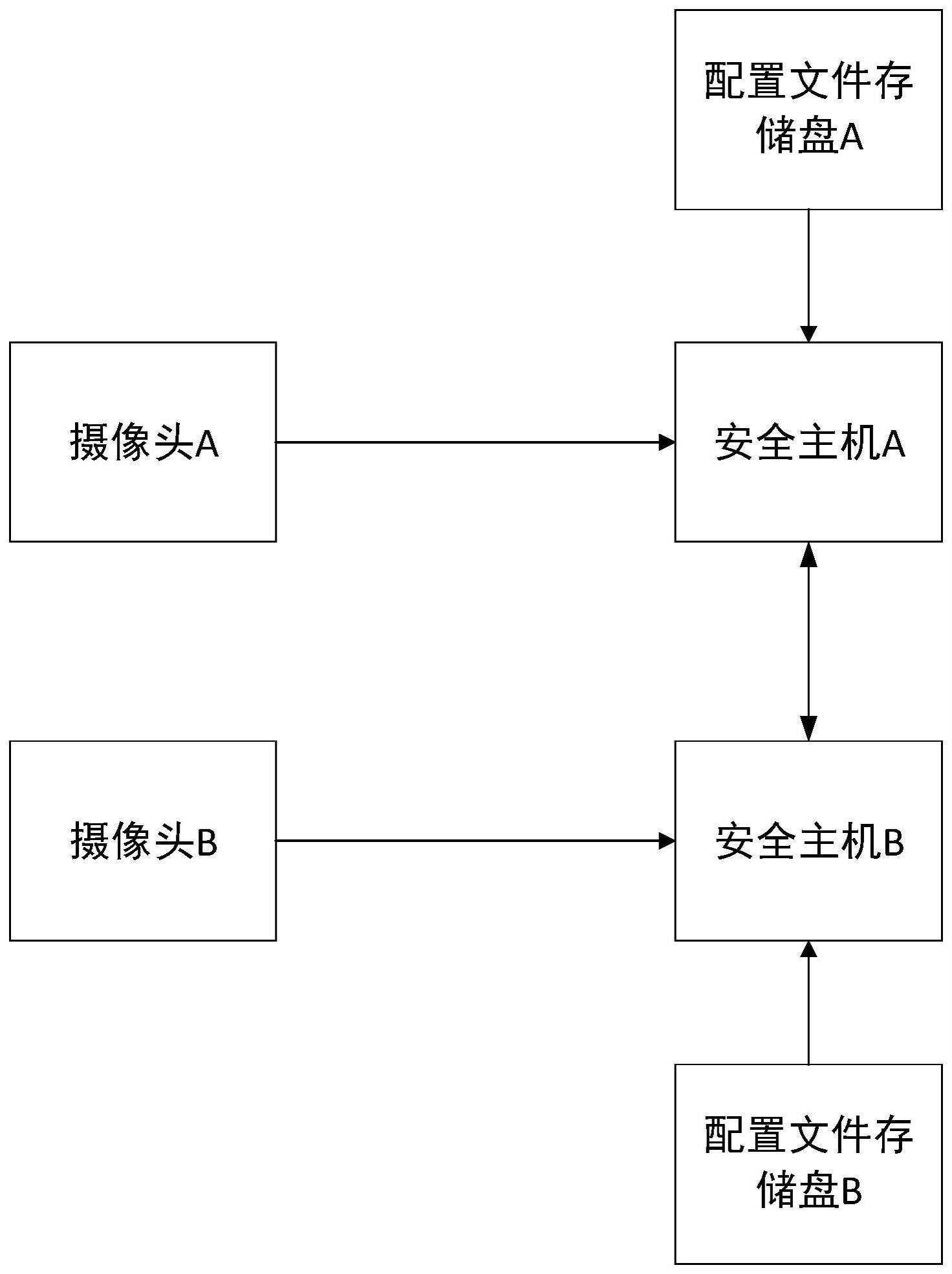
11、作为优选的技术方案,所述摄像头、安全主机和配置文件存储盘均设有两套,用于实现两个通道独立采集、运算和输出,最后对输出的结果继续进行比较,只有两个通道得到的结果一致,才认为该结果是安全运算的结果。
12、作为优选的技术方案,所述两个通道的供电电源独立。
13、作为优选的技术方案,两个所述摄像头的使用不同品牌且不同焦距的镜头,以并排或者上下堆叠安装。
14、作为优选的技术方案,所述摄像头安装在驾驶室里靠近公里标的一边,朝向车前进方向安装,并与列车前方脱钩的相对位置为固定的。
15、根据本发明的第二方面,提供了一种采用所述基于视觉识别的列车定位测速系统的方法,该方法包括以下步骤:
16、步骤s1,摄像头拍摄前方图像,并从图像中识别出二维码信息发送给安全主机;
17、步骤s2,安全主机对二维码信息进行解析,识别前方的里程标牌,并利用二维码上的三个定位点,经过测距算法计算,得到车辆到达前方里程标牌的距离。
18、作为优选的技术方案,所述测距算法具体为:
19、带二维码的里程标牌与摄像机成像面的距离l通过以下公式计算得到:
20、
21、
22、
23、
24、
25、
26、a=16
27、b=-16(2d22+d12)
28、c=16d22(d22+2d12)
29、d=-16d12d24-d12(d32-d12-d22)2
30、其中d为二维码定位点顶点像长,d1,d2和d3分别为三个二维码定位点顶点之间的像长,f为镜头焦距,u为物距,v为像距,m为二维码定位点顶点距离,a、b、c、d、p、q、δ、x、y均为以上方程的中间变量。
31、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
32、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
33、与现有技术相比,本发明具有以下优点:
34、1)本发明将列车测速定位通过车辆上的传感器来实现,相比于传统的速度传感器引入的空转打滑误差,本发明能实现更高精度的测速定位。
35、2)本发明将列车测速定位通过轨旁公里标换成二维码来实现,相比于传统的信标,本发明更加经济,部署、运营及维护成本更低。
36、3)本发明通过轨旁的公里标进行定位,实时修正,避免误差的累积。
37、4)本发明公里标换成二维码,可以通过编码加入更多丰富的信息。
38、5)本发明二维码中加入校验信息,防止信息识别中的错误,满足功能安全标准的要求。
39、6)本发明公里标二维码的固定尺寸可以用于摄像头三点定位的标定基准。
40、7)本发明使用摄像头进行视觉定位,成本低,实现难度小。
41、8)本发明图像处理二维码算法简单,识别容易,无需使用人工智能算法,算法具有确定性和可解释性,可以应用于功能安全领域。
42、9)本发明通过相异的相机和镜头,规避两个摄像头的共因失效,实现安全功能。
技术特征:
1.一种基于视觉识别的列车定位测速系统,其特征在于,该系统包括:
2.根据权利要求1所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述的二维码中包括以下信息:对应里程标牌信息以及用于里程标牌信息完整性校验的校验信息。
3.根据权利要求2所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述的二维码中信息通过加密算法加密后印制在里程标牌上。
4.根据权利要求2所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述的二维码的大小全线固定,统一为m厘米×m厘米,其中m的取值综合考虑线路中标牌之间最大间隔、使用的镜头焦距、镜头光学分辨率和车辆最大速度。
5.根据权利要求1所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述系统还包括与安全主机连接的配置文件存储盘,该配置文件存储盘储存有供安全主机使用的电子地图,该电子地图中录入有每个里程标牌在整条线路中的位置信息。
6.根据权利要求5所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述摄像头、安全主机和配置文件存储盘均设有两套,用于实现两个通道独立采集、运算和输出,最后对输出的结果继续进行比较,只有两个通道得到的结果一致,才认为该结果是安全运算的结果。
7.根据权利要求6所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述两个通道的供电电源独立。
8.根据权利要求6所述的一种基于视觉识别的列车定位测速系统,其特征在于,两个所述摄像头的使用不同品牌且不同焦距的镜头,以并排或者上下堆叠安装。
9.根据权利要求6所述的一种基于视觉识别的列车定位测速系统,其特征在于,所述摄像头安装在驾驶室里靠近公里标的一边,朝向车前进方向安装,并与列车前方脱钩的相对位置为固定的。
10.一种采用权利要求1所述基于视觉识别的列车定位测速系统的方法,其特征在于,该方法包括以下步骤:
11.根据权利要求10所述的方法,其特征在于,所述测距算法具体为:
12.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求10~11中任一项所述的方法。
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求10~11中任一项所述的方法。
技术总结
本发明涉及一种基于视觉识别的列车定位测速系统、方法、设备及介质,该系统包括:带二维码的里程标牌,按照设定距离布设在轨道旁;摄像头,用于采集里程标牌上的二维码图像;安全主机,与摄像头连接,用于将摄像头采集的二维码图像进行解析,识别前方的里程标牌,并利用二维码上的定位用图案,经过测距算法计算,得到车辆到达前方里程标牌的距离。与现有技术相比,本发明具有能实现更经济、更高效、更高精度的测速定位等优点。
技术研发人员:林伟欣,魏民,李云,崔洪州,阳扬,王思远,蒋耀东,梅晗
受保护的技术使用者:卡斯柯信号有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!