一种翻车机自动复钩系统及方法与流程
本发明涉及翻车机系统的铁路车辆复钩,具体而言是一种翻车机自动复钩系统及方法。
背景技术:
1、翻车机卸车系统是用来翻卸铁路车辆的高效自动化设备。在卸车作业中,铁路车辆与翻车机处进行翻卸,之后翻卸后的铁路车辆需要在铁路空车线上集结成列,然后由铁路机车牵引拉走。然而,铁路车辆在翻车机系统作业并进入空车线后,车辆两侧的车钩均处于闭合状态。当相互连挂的两个车钩均处于闭合状态时,车钩是无法相互连挂的。因此,需要在铁路车辆相撞前,将相互碰撞的其中一个车钩打开,从而使得铁路车辆相撞时实现自动挂钩。
2、在翻车机系统中,该道工序被称为复钩作业,是翻卸完成后铁路车辆与车列顺利挂钩的必要前置程序。目前,该道工序由人工操作来完成,主要分为两步,具体动作为:1、对车钩提杆进行提销作业,完成摘钩动作;2、通过外力将钩舌打开。
3、为了替代人工,实现自动化复钩作业,《一种铁路运输作业复钩机构》(2022218975097)、《摘复钩机器人及其摘钩开钩作业方法》(202110496954 6),公开了一种智能复钩机器人,其上均设置有摘钩机构和掰钩机构,分别执行摘钩的动作和掰钩的动作,但是其结构复杂,成本较高。
技术实现思路
1、根据上述技术问题,而提供一种翻车机自动复钩系统及方法。
2、本发明采用的技术手段如下:
3、一种翻车机自动复钩系统,所述系统包括翻车机、调车机和自动摘钩机器人;
4、所述翻车机位于铁路上,用于翻卸铁路的重车线上的铁路车辆;
5、所述调车机位于所述铁路旁,用于推送翻卸后的所述铁路车辆;
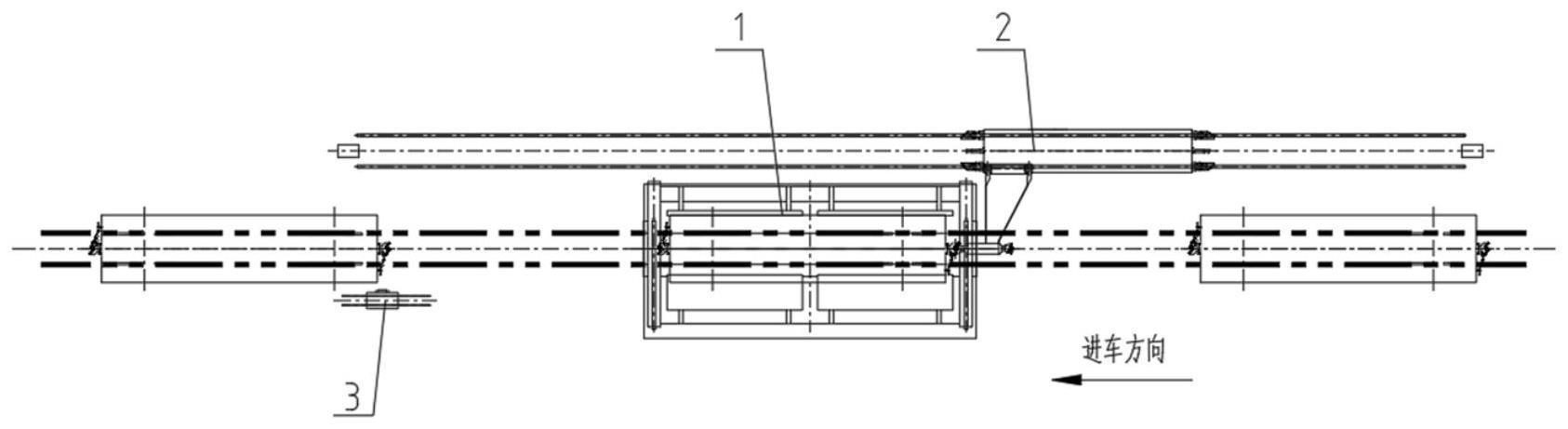
6、所述自动摘钩机器人布置于所述铁路的空车线一侧的地面上,包括固定于地面上的轨道装置、车架、安装于所述车架底部并与所述轨道装置配合的行走装置、驱动所述车架沿所述轨道装置移动的驱动装置、安装于所述车架上的摘钩装置;所述摘钩装置用于转动铁路车辆的车钩的车钩提杆,实现铁路车辆的车钩的摘钩;
7、所述铁路车辆由所述调车机移动至位于所述空车线上的车辆摘钩位后,所述自动摘钩机器人对所述铁路车辆进行摘钩,所述调车机与所述铁路车辆分离时,所述调车机的车钩的钩舌打开所述铁路车辆的车钩的钩舌,实现所述铁路车辆的复钩。
8、优选地,所述翻车机自动复钩系统为贯通式自动复钩系统,所述铁路为一条,所述空车线和所述重车线分别位于所述翻车机的前后两侧。
9、优选地,所述翻车机自动复钩系统为折返式自动复钩系统,所述铁路为两条,所述重车线和所述空车线并排设置,且所述重车线和所述空车线之间具有迁车台,所述迁车台用于将所述重车线上的铁路车辆迁移至所述空车线,所述重车线旁和所述空车线旁均配置有所述调车机。
10、优选地,所述摘钩机构包括第一摘钩臂、第二摘钩臂和勾爪,所述第一摘钩臂的一端与所述车架铰接,另一端与所述第二摘钩臂的一端铰接,所述第二摘钩臂的另一端与所述勾爪铰接;所述第一摘钩臂与所述车架铰接处设置有用于转动所述第一摘钩臂的第一转动驱动单元,所述第二摘钩臂与所述第一摘钩臂的铰接处设置有用于转动所述第二摘钩臂的第二转动驱动单元,所述勾爪与所述第二摘钩臂的铰接处设置有用于转动所述勾爪的第三转动驱动单元;所述第一转动驱动单元的转动轴线垂直于所述第一摘钩臂的轴线;所述第二转动驱动单元的转动轴线垂直于所述第二摘钩臂的轴线;所述第三转动驱动单元的转动轴线平行于所述第二摘钩臂的轴线。
11、优选地,所述勾爪包括转板和安装在转板一端的勾爪本体,所述勾爪本体呈c形或u形,所述转板的另一端与所述第二摘钩臂铰接,所述转板所在平面平行于所述第二摘钩臂的端面。
12、本发明还公开了一种翻车机自动复钩方法,包括如下步骤:
13、(1)所述调车机将由所述翻车机翻卸后的铁路车辆推送到所述车辆摘钩位;
14、(2)所述自动摘钩机器人行走到所述车辆摘钩位;
15、(3)所述自动摘钩机器人伸出所述摘钩机构对所述铁路车辆的车钩进行摘钩;
16、(4)所述自动摘钩机器人收回所述摘钩机构;
17、(5)所述调车机后退行走与所述铁路车辆分离,分离的过程中,由调车机的钩舌将所述铁路车辆的钩舌打开,实现所述铁路车辆的自动复钩,且自动复钩过程中所述调车机的钩舌处于闭合状态。
18、之后下一辆铁路车辆重复上述操作,然后两个铁路车辆的钩舌相撞完成车钩的连挂,完成两节车厢的连接。
19、较现有技术相比,本发明具有以下优点:
20、本发明仅利用自动摘钩机器人并配合调车机就可以完成铁路车辆的复钩作业,设备简洁,方法简单,成本较低,可靠性高。
21、基于上述理由本发明可在翻车机系统中的铁路车辆复钩等领域广泛推广。
技术特征:
1.一种翻车机自动复钩系统,所述自动复钩系统包括翻车机、调车机,其特征在于,还包括自动摘钩机器人;
2.根据权利要求1所述的一种翻车机自动复钩系统,其特征在于,所述翻车机自动复钩系统为贯通式自动复钩系统,所述铁路为一条,所述空车线和所述重车线分别位于所述翻车机的前后两侧。
3.根据权利要求1所述的一种翻车机自动复钩系统,其特征在于,所述翻车机自动复钩系统为折返式自动复钩系统,所述铁路为两条,所述重车线和所述空车线并排设置,且所述重车线和所述空车线之间具有迁车台,所述迁车台用于将所述重车线上的铁路车辆迁移至所述空车线,所述重车线旁和所述空车线旁均配置有所述调车机。
4.根据权利要求1所述的一种翻车机自动复钩系统,其特征在于,所述摘钩机构包括第一摘钩臂、第二摘钩臂和勾爪,所述第一摘钩臂的一端与所述车架铰接,另一端与所述第二摘钩臂的一端铰接,所述第二摘钩臂的另一端与所述勾爪铰接;所述第一摘钩臂与所述车架铰接处设置有用于转动所述第一摘钩臂的第一转动驱动单元,所述第二摘钩臂与所述第一摘钩臂的铰接处设置有用于转动所述第二摘钩臂的第二转动驱动单元,所述勾爪与所述第二摘钩臂的铰接处设置有用于转动所述勾爪的第三转动驱动单元;所述第一转动驱动单元的转动轴线垂直于所述第一摘钩臂的轴线;所述第二转动驱动单元的转动轴线垂直于所述第二摘钩臂的轴线;所述第三转动驱动单元的转动轴线平行于所述第二摘钩臂的轴线。
5.根据权利要求4所述的一种翻车机自动复钩系统,其特征在于,所述勾爪包括转板和安装在转板一端的勾爪本体,所述勾爪本体呈c形或u形,所述转板的另一端与所述第二摘钩臂铰接,所述转板所在平面平行于所述第二摘钩臂的端面。
6.一种翻车机自动复钩方法,其特征在于,所述方法基于权利要求1~5任一权利要求所述的系统,包括如下步骤:
技术总结
本发明提供一种翻车机自动复钩系统及方法,所述自动复钩系统包括翻车机、调车机和自动摘钩机器人;所述铁路车辆由所述调车机移动至位于所述空车线上的车辆摘钩位后,所述自动摘钩机器人对所述铁路车辆进行摘钩,所述调车机与所述铁路车辆分离时,所述调车机的车钩的钩舌打开所述铁路车辆的车钩的钩舌,实现所述铁路车辆的复钩。本发明仅利用自动摘钩机器人并配合调车机就可以完成铁路车辆的复钩作业,设备简洁,方法简单,成本较低,可靠性高。
技术研发人员:李晋,张文海,邓平平,程康,王曦,王琛,朱成章,赵阳
受保护的技术使用者:大连华锐重工集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!