用于巡检机器人的行走装置及行走系统的制作方法
本发明涉及巡检机器人领域,特别涉及一种用于巡检机器人的行走装置及行走系统。
背景技术:
1、在煤矿等危险场所中,巡检机器人会沿轨道移动,以进行防爆巡检。
2、现有技术中,轨道通常具有爬坡段,巡检机器人在行走装置的带动下沿爬坡段移动时,容易产生打滑现象。
技术实现思路
1、本发明提供一种用于巡检机器人的行走装置及行走系统,减少在轨道的爬坡段容易打滑的现象。
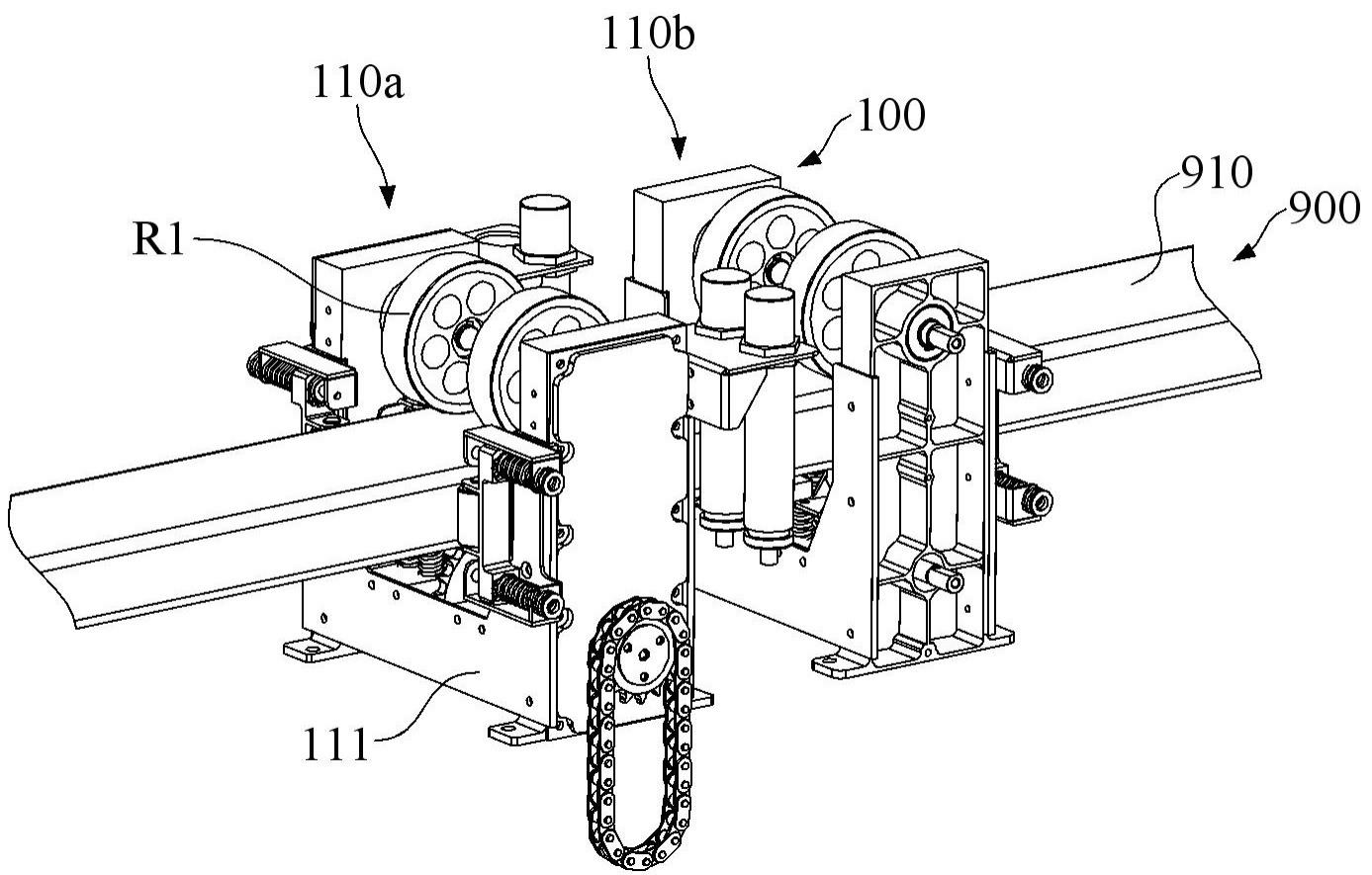
2、第一方面,本发明实施例提供一种用于巡检机器人的行走装置,用于带动巡检机器人沿轨道行走,所述轨道包括轨道本体和设置于所述轨道本体下表面的第一链条,所述轨道本体具有爬坡段,所述第一链条至少延伸于所述爬坡段,所述行走装置包括沿所述轨道的延伸方向间隔设置的第一行走单元和第二行走单元,所述第一行走单元、所述第二行走单元都包括:支撑架,部分环绕所述轨道设置,所述支撑架能够连接所述巡检机器人;第一滚轮,与所述支撑架转动连接,并与所述轨道本体的上表面接触;第二滚轮,与所述支撑架转动连接;第一弹性件,将所述第二滚轮与所述支撑架弹性连接,所述第一弹性件将所述第二滚轮弹向与所述轨道本体的下表面抵接,使得所述轨道夹设于所述第一滚轮、所述第二滚轮之间,所述第一行走单元还包括:驱动轴,可转动地穿设于所述支撑架,所述驱动轴能够连接转动驱动件;第一链轮,与所述驱动轴连接,所述第一链轮能够与所述第一链条啮合,其中,所述驱动轴与所述第一滚轮传动连接,使得所述驱动轴能够带动所述第一滚轮以及所述第一链轮转动。
3、根据本发明第一方面的前述实施方式,所述驱动轴穿设于所述第一链轮,使得所述第一链轮与所述驱动轴同步转动,所述所述第一滚轮通过传动组件与所述驱动轴传动连接,所述传动组件设置为使所述第一滚轮的转动方向与所述驱动轴的转动方向相反。
4、根据本发明第一方面的前述任一实施方式,所述支撑架包括第一纵向支架、第二纵向支架以及横向支架,所述第一纵向支架、所述第二纵向支架对称设置于所述轨道的两侧,所述横向支架位于所述轨道下侧,并将所述第一纵向支架与所述第二纵向支架连接,所述第一滚轮成对设置,成对的所述第一滚轮中的一者与所述第一纵向支架转动连接,另一者与所述第二纵向支架转动连接,成对的所述第一滚轮相互间隔设置,所述驱动轴同时与成对的所述第一滚轮传动连接。
5、根据本发明第一方面的前述任一实施方式,所述第一纵向支架、所述第二纵向支架的内部分别具有容纳空间,所述传动组件设置于所述容纳空间内,所述传动组件包括:第一传动齿轮,与所述驱动轴同轴连接;第二传动齿轮,与所述第一滚轮同轴连接;第一桥接齿轮,转动设置于所述容纳空间内,所述第一桥接齿轮与所述第一传动齿轮啮合;第二桥接齿轮,转动设置于所述容纳空间内,所述第二桥接齿轮分别与所述第二传动齿轮、所述第一桥接齿轮啮合,所述第二传动齿轮、所述第二桥接齿轮、所述第一桥接齿轮、所述第一传动齿轮沿纵向依次排列。
6、根据本发明第一方面的前述任一实施方式,所述第一滚轮、所述第一传动齿轮、所述第二传动齿轮、所述第一桥接齿轮、所述第二桥接齿轮分别具有绕自身回转轴线环绕设置的多个通孔。
7、根据本发明第一方面的前述任一实施方式,所述第二滚轮成对设置,所述第二滚轮的位置与所述第一滚轮的位置对应,所述第一链轮位于成对的所述第二滚轮之间,所述第一行走单元、所述第二行走单元都还包括:底部滚轮支架,所述第二滚轮转动设置于所述底部滚轮支架;底部固定支架,与所述横向支架固定连接,所述第一弹性件连接于所述底部固定支架与所述底部滚轮支架之间,其中,所述底部固定支架包括沿所述轨道本体的延伸方向依次连接的第一抵接部、避让部、第二抵接部,所述避让部相对所述第一抵接部、所述第二抵接部朝向所述轨道的方向弯折设置以形成避让空间,所述驱动轴穿过所述避让空间,所述第一弹性件为导向弹性件,所述第一抵接部与所述底部滚轮支架之间、所述第二抵接部与所述底部滚轮支架之间均匀布置有所述第一弹性件。
8、根据本发明第一方面的前述任一实施方式,所述第一行走单元、所述第二行走单元都还包括:成对的第三滚轮,与所述支撑架转动连接,成对的所述第三滚轮对称布置于所述轨道的两侧并能够与所述轨道本体的侧面接触;成对的第四滚轮,与所述支撑架转动连接,成对的所述第四滚轮对称布置于所述轨道的两侧;第二弹性件,将所述第四滚轮与所述支撑架弹性连接,所述第二弹性件将所述第四滚轮弹向与所述轨道本体的侧面抵接,使得所述轨道夹设于成对的所述第四滚轮之间。
9、根据本发明第一方面的前述任一实施方式,所述第一行走单元、所述第二行走单元都还包括:侧部滚轮支架,所述第四滚轮转动设置于所述侧部滚轮支架;侧部固定支架,与所述支撑架固定连接,所述第二弹性件连接于所述侧部固定支架与所述侧部滚轮支架之间,其中,所述侧部固定支架设有相互平行的至少两个导向柱,所述侧部滚轮支架设有滑动部,所述滑动部套设于所述导向柱并沿所述导向柱可滑动,所述第二弹性件抵接于所述侧部滚轮支架与所述侧部固定支架之间。
10、根据本发明第一方面的前述任一实施方式,所述行走装置还包括与所述第一行走单元、所述第二行走单元中的至少一者的支撑架连接的第一位置传感器、第二位置传感器、第三位置传感器,所述第一位置传感器能够在感测到位于所述轨道上巡检起点处的第一触发件时产生第一到位信号;所述第二位置传感器能够在感测到位于所述轨道上巡检终点处的第二触发件时产生第二到位信号;所述第三位置传感器能够在感测到位于所述轨道上充电位置处的第三触发件时产生第三到位信号。
11、第二方面,本发明实施例提供一种用于巡检机器人的行走系统,其包括:轨道,所述轨道包括轨道本体和设置于所述轨道本体下表面的第一链条,所述轨道本体具有爬坡段,所述第一链条至少延伸于所述爬坡段;根据本发明第一方面的前述任一实施方式的用于巡检机器人的行走装置,所述第一链轮能够与所述第一链条啮合。
12、根据本发明实施例的用于巡检机器人的行走装置,轨道包括轨道本体和设置于轨道本体下表面的第一链条,第一链条至少延伸于轨道本体的爬坡段。第一行走单元、第二行走单元都包括第一滚轮和第二滚轮,第一弹性件将第二滚轮弹向与轨道本体的下表面抵接,使得轨道夹设于第一滚轮、第二滚轮之间,因此,第一行走单元、第二行走单元可以较稳定地沿着轨道移动。第一行走单元还包括驱动轴和第一链轮,在第一行走单元行走至爬坡段时,一方面,第一滚轮和第二滚轮夹紧轨道本体,另一方面,第一链轮与第一链条啮合,驱动轴带动第一滚轮以及第一链轮转动,使得第一滚轮相对轨道本体的滚动运动、第一链轮沿第一链条啮合移动,实现两种方式同时驱动行走装置行走,从而带动巡检机器人在爬坡段稳定行走,第一链轮与第一链条啮合能够保证行走装置在爬坡段不再打滑,提高行走效率。
技术特征:
1.一种用于巡检机器人的行走装置,用于带动巡检机器人沿轨道行走,其特征在于,所述轨道包括轨道本体和设置于所述轨道本体下表面的第一链条,所述轨道本体具有爬坡段,所述第一链条至少延伸于所述爬坡段,所述行走装置包括沿所述轨道的延伸方向间隔设置的第一行走单元和第二行走单元,所述第一行走单元、所述第二行走单元都包括:
2.如权利要求1所述的用于巡检机器人的行走装置,其特征在于,所述驱动轴穿设于所述第一链轮,使得所述第一链轮与所述驱动轴同步转动,所述所述第一滚轮通过传动组件与所述驱动轴传动连接,所述传动组件设置为使所述第一滚轮的转动方向与所述驱动轴的转动方向相反。
3.如权利要求2所述的用于巡检机器人的行走装置,其特征在于,所述支撑架包括第一纵向支架、第二纵向支架以及横向支架,所述第一纵向支架、所述第二纵向支架对称设置于所述轨道的两侧,所述横向支架位于所述轨道下侧,并将所述第一纵向支架与所述第二纵向支架连接,所述第一滚轮成对设置,成对的所述第一滚轮中的一者与所述第一纵向支架转动连接,另一者与所述第二纵向支架转动连接,成对的所述第一滚轮相互间隔设置,所述驱动轴同时与成对的所述第一滚轮传动连接。
4.如权利要求3所述的用于巡检机器人的行走装置,其特征在于,所述第一纵向支架、所述第二纵向支架的内部分别具有容纳空间,所述传动组件设置于所述容纳空间内,所述传动组件包括:
5.如权利要求4所述的用于巡检机器人的行走装置,其特征在于,所述第一滚轮、所述第一传动齿轮、所述第二传动齿轮、所述第一桥接齿轮、所述第二桥接齿轮分别具有绕自身回转轴线环绕设置的多个通孔。
6.如权利要求3所述的用于巡检机器人的行走装置,其特征在于,所述第二滚轮成对设置,所述第二滚轮的位置与所述第一滚轮的位置对应,所述第一链轮位于成对的所述第二滚轮之间,所述第一行走单元、所述第二行走单元都还包括:
7.如权利要求1所述的用于巡检机器人的行走装置,其特征在于,所述第一行走单元、所述第二行走单元都还包括:
8.如权利要求7所述的用于巡检机器人的行走装置,其特征在于,所述第一行走单元、所述第二行走单元都还包括:
9.如权利要求1所述的用于巡检机器人的行走装置,其特征在于,所述行走装置还包括与所述第一行走单元、所述第二行走单元中的至少一者的支撑架连接的第一位置传感器、第二位置传感器、第三位置传感器,
10.一种用于巡检机器人的行走系统,其特征在于,包括:
技术总结
本发明公开一种用于巡检机器人的行走装置及行走系统。行走装置包括沿轨道的延伸方向间隔设置的第一行走单元和第二行走单元,第一行走单元、第二行走单元都包括:支撑架,部分环绕轨道设置;第一滚轮,与支撑架转动连接,并与轨道本体的上表面接触;第二滚轮;第一弹性件,将第二滚轮与支撑架弹性连接,第一弹性件将第二滚轮弹向与轨道本体的下表面抵接,第一行走单元还包括:驱动轴,可转动地穿设于支撑架,驱动轴能够连接转动驱动件;第一链轮,与驱动轴连接,第一链轮能够与第一链条啮合,其中,驱动轴与第一滚轮传动连接,使得驱动轴能够带动第一滚轮以及第一链轮转动。上述用于巡检机器人的行走装置,减少在轨道的爬坡段容易打滑的现象。
技术研发人员:彭晓斌
受保护的技术使用者:广州国巡机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!