一种虚拟联挂列控制动控制方法、介质及系统与流程
本发明主要涉及轨道交通,具体涉及一种虚拟联挂列控制动控制方法、介质及系统。
背景技术:
1、在保障铁路运输安全的前提下,如何采用新的技术提升铁路运输效率成为铁路发展较为迫切的问题。列车虚拟联挂技术是通过使用无线通信方式代替机械联挂,实现多列车虚拟编组成一列车,达到缩短行车间隔,提高线路运输效率的目的。
2、由于虚拟编组内的多列车并没有机械联挂,在运行中虚拟编组内的列车之间需要保持一定的安全间隔距离,防止虚拟编组内列车因速度不一致,引发列车冲撞等安全事故。通常情况下,虚拟编组内的后车需要计算与前车相对制动距离,并在运行中保持与前车距离接近该距离。如该距离计算比实际偏大,虚拟联挂整列车距离边长,影响线路运输效率;如该距离计算比实际偏小,虚拟联挂编组内的列车存在冲撞的风险,存在运输安全。
3、由于编组内不同列车制动属性、编组、线路状态和运行速度均不相同,编组内的后车需要根据前车当前速度、制动特性、本车当前速度、制动特性、车车通信延迟等信息进行综合计算才能获得距离前车相对制动距离。因此与前车相对制动距离设计到相关动态变化的因素较多,算法较为复杂。
4、针对虚拟联挂编组内列车,由于每列车的制动属性、编组、列车所处线路状态及当前运行速度均不同,且随着编组运行在不断发生变化,车与车之间的无线通信延迟等因素,因此需要准确计算出虚拟编组内的列车与前车相对制动距离,存在如下问题:
5、1)需要考虑前车速度、制动属性、线路坡度等因素,研究前车最有利停车距离算法;
6、2)需要考虑后车速度、列车编组、制动属性、线路坡度等因素,研究前车最不利停车距离算法;
7、3)需要考虑车车通信延迟的离散性,并依据列车速度等因素,计算延迟带来的影响;
8、4)需要考虑在运行动态条件下,列车速度变化、线路坡度变化等因素带来的影响。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种计算过程简单快速,提高计算的准确性,保障列车的安全性的虚拟联挂列控制动控制方法、介质及系统。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种虚拟联挂列控制动控制方法,包括步骤:
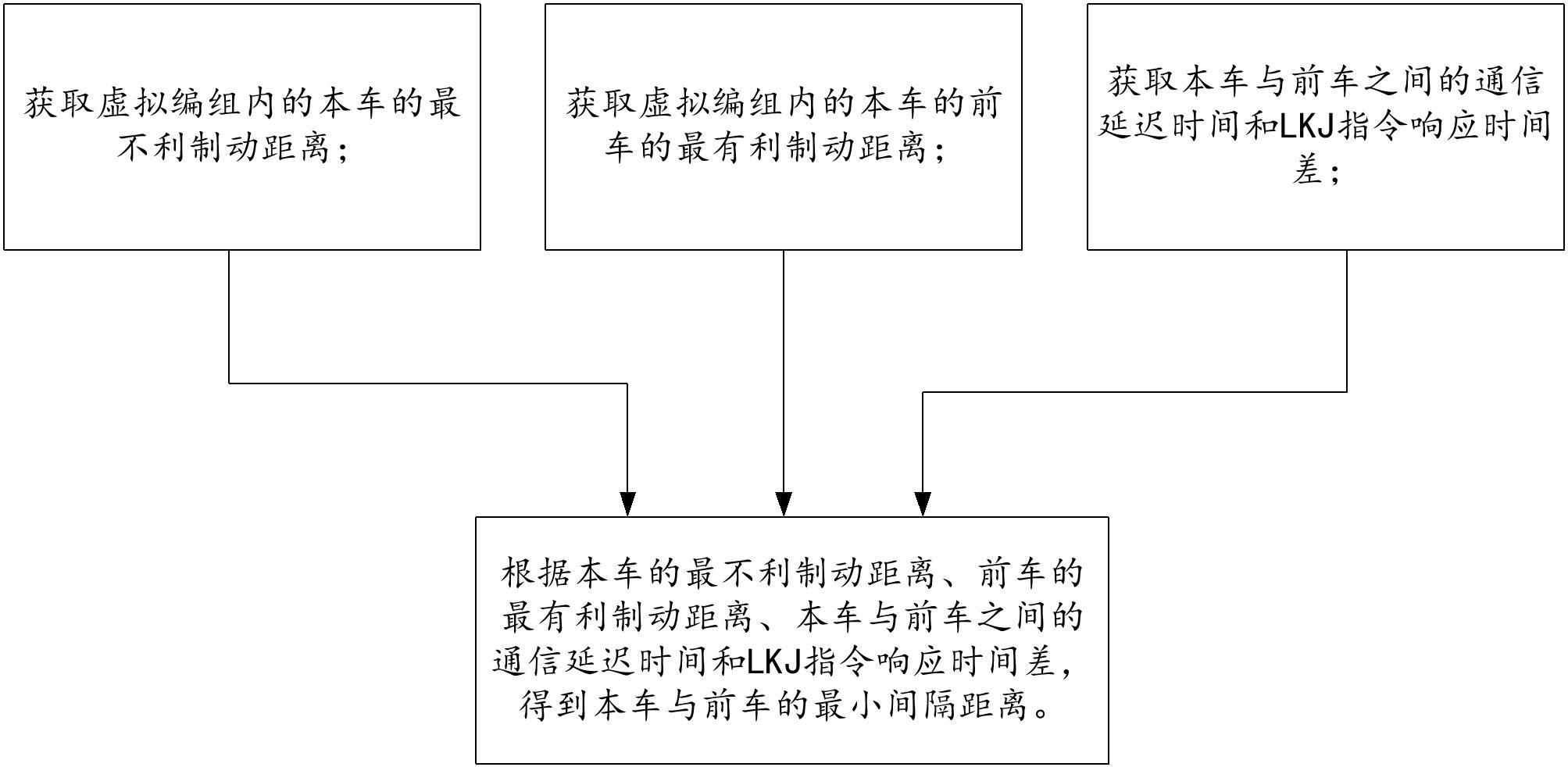
4、获取虚拟编组内的本车的最不利制动距离;
5、获取虚拟编组内的本车的前车的最有利制动距离;
6、获取本车与前车之间的通信延迟时间和lkj指令响应时间差;
7、根据本车的最不利制动距离、前车的最有利制动距离、本车与前车之间的通信延迟时间和lkj指令响应时间差,得到本车与前车的最小间隔距离;
8、本车最不利制动距离的计算公式为:
9、
10、其中为有效制动距离;为安全制动距离;为空走距离;为lkj指令响应时间差;v为本车的当前速度。
11、优选地,前车的最有利制动距离的计算公式为:
12、。
13、优选地,本车与前车的最小间隔距离d的计算公式为:
14、
15、为本车与前车之间的通信延迟时间。
16、优选地,所述有效制动距离为:
17、
18、其中—制动初速,单位km/h;—制动末速,单位km/h;—闸瓦换算摩擦系数;—列车换算制动率;—常用制动系数;—列车单位基本阻力,单位n/kn;—制动地段加算坡度千分数。
19、优选地,所述安全制动距离为:
20、
21、其中—安全距离基本值,—制动初速,单位km/h。
22、本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述方法的步骤。
23、本发明还公开了一种虚拟联挂列控制动控制系统,包括相互连接的存储器和处理器,所述存储器上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述方法的步骤。
24、与现有技术相比,本发明的优点在于:
25、本发明按照列车制动距离计算公式进行列车紧急制动距离的计算,分析最不利停车距离、最有利停车距离影响因素,结合列控设备响应时间、无线网络车车通信延迟等外部因素,综合获得最小间隔距离,其计算过程简单快速,能够提高计算的准确性,保障列车的安全性;上述方法能适应于不同列车类型、不同编组,不同线路坡度等条件下的虚拟联挂列车最小间隔距离的计算,具备较好的适应性。
技术特征:
1.一种虚拟联挂列控制动控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的虚拟联挂列控制动控制方法,其特征在于,前车的最有利制动距离的计算公式为:
3.根据权利要求2所述的虚拟联挂列控制动控制方法,其特征在于,本车与前车的最小间隔距离d的计算公式为:
4.根据权利要求1-3中任意一项所述的虚拟联挂列控制动控制方法,其特征在于,所述有效制动距离为:
5.根据权利要求1-3中任意一项所述的虚拟联挂列控制动控制方法,其特征在于,所述安全制动距离为:
6.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序在被处理器运行时执行如权利要求1~5中任意一项所述方法的步骤。
7.一种虚拟联挂列控制动控制系统,包括相互连接的存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述计算机程序在被处理器运行时执行如权利要求1~5中任意一项所述方法的步骤。
技术总结
本发明公开了一种虚拟联挂列控制动控制方法、介质及系统,方法包括步骤:获取虚拟编组内的本车的最不利制动距离;获取虚拟编组内的本车的前车的最有利制动距离;获取本车与前车之间的通信延迟时间和LKJ指令响应时间差;根据本车的最不利制动距离、前车的最有利制动距离、本车与前车之间的通信延迟时间和LKJ指令响应时间差,得到本车与前车的最小间隔距离。本发明的计算过程简单快速,能够提高计算的准确性,保障列车的安全性。
技术研发人员:王强,李启翮,王业流,刘公卿
受保护的技术使用者:湖南中车时代通信信号有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!