一种基于制动机的自动驾驶用制动控制系统及其轨道车的制作方法
本发明涉及自动驾驶和电控制动,尤其涉及基于制动机的自动驾驶用制动控制系统及其轨道车。
背景技术:
1、轨道工程车基本都配置jz-7型空气制动机,近年来,钢铁企业、地方铁路提出了对轨道工程车信息化、智能化、自动驾驶方面的需求,并呈现出逐年上升的趋势,其中钢铁企业有强烈的意愿对既有轨道工程车、牵引机车升级自动驾驶功能,以提高作业效率、降低人工成本。既有轨道工程车、牵引机车都配置jz-7型空气制动机,该制动机为纯机械产品,不具备信息化、智能化和自动驾驶制动控制功能。
2、因此,在保持jz-7型空气制动机配置、控制原理不变的前提下,需要开发一套能与jz-7型空气制动机配合使用的自动驾驶用制动控制系统,进而实现轨道工程车自动驾驶控制的需求。
技术实现思路
1、为了解决上述现有技术中存在的技术问题,本发明提供了一种基于制动机的自动驾驶用制动控制系统及其轨道车。
2、为实现上述目的,本发明实施例提供了如下的技术方案:
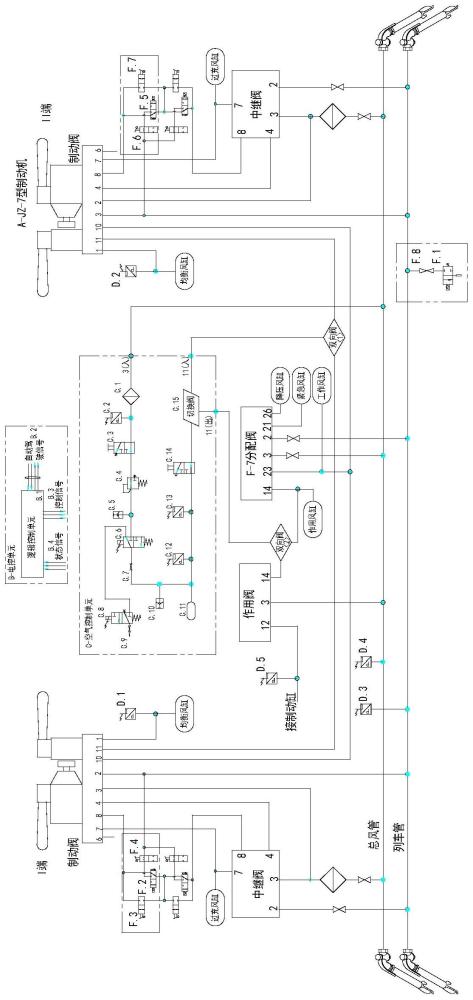
3、第一方面,在本发明提供的一个实施例中,提供了基于制动机的自动驾驶用制动控制系统,该制动控制系统包括:电控单元、空气控制单元、空气制动系统状态监测单元和紧急制动控制单元;
4、所述电控单元用于接收自动驾驶系统输入的制动指令,经处理后输出制动、缓解和保压信号,并接收所述空气制动系统状态监测单元反馈的制动系统状态信号,将制动指令执行情况反馈给自动驾驶系统;对制动系统进行系统自检、实时监测系统状态并进行故障判断,根据制动系统状态实施相应的制动操作;
5、所述空气控制单元用于执行所述电控单元输出的制动指令,实现制动缸压力的无级调节,并将制动缸压力信号反馈给所述电控单元;
6、所述空气制动系统状态监测单元用于对制动系统各管路压力进行实时检测,并将检测到的压力信号反馈给所述电控单元;
7、所述紧急制动控制单元用于执行所述电控单元发出的紧急制动指令,同时切断总风给列车管的补风通路。
8、作为本发明的进一步方案,所述电控单元包括逻辑控制单元,设置在逻辑控制单元上的自动驾驶信号i/o端口、制动控制信号输出接口和制动系统状态信号输入接口。
9、作为本发明的进一步方案,所述空气控制单元包括隔离塞门一、调压阀、制动电磁阀、缓解电磁阀、缓冲风缸、压力变送器二、压力变送器三和切换阀;隔离塞门一的输入接口与总风管连通;所述隔离塞门一的输出接口与调压阀输入接口连通;所述调压阀的输出接口与制动电磁阀的第一接口连通,所述制动电磁阀的第二接口与缓解电磁阀的第一接口连通,所述缓解电磁阀的第二接口与缩堵二的第一接口连通;所述制动电磁阀的第三接口与缩堵一的第一接口连通,缩堵一的第二接口与缓冲风缸的输入口和隔离塞门二第一接口连通,所述隔离塞门二的第二接口与切换阀的第一接口连通,所述切换阀的第二接口与jz-7型空气制动系统单独作用管的入口连通;所述切换阀的第三接口与jz-7型空气制动系统单独作用管的出口连通;其中,隔离塞门一的输入接口上设置有用于测压的压力变送器。
10、作为本发明的进一步方案,所述隔离塞门二的第一接口上设置有用于测压的压力变送器三;所述隔离塞门二的第一接口上还设置有用于测压的压力变送器二。
11、作为本发明的进一步方案,所述调压阀的输出接口处设置有测压接口一,缩堵一的第二接口上设置有测压接口二。
12、作为本发明的进一步方案,所述空气控制单元还包括滤尘器,隔离塞门一的输入接口通过滤尘器与总风管连通;所述滤尘器的第一接口与总风管连通,所述滤尘器的第一接口与隔离塞门一的输入接口连通。
13、作为本发明的进一步方案,所述空气制动系统状态监测单元,用于监测均衡风缸压力、列车管压力、总风压力和制动缸压力,并将监测到的压力信号反馈给所述电控单元。
14、作为本发明的进一步方案,所述空气制动系统状态监测单元包括均衡风缸压力变送器一、均衡风缸压力变送器二、列车管压力变送器、总风压力变送器和制动缸压力变送器。
15、作为本发明的进一步方案,紧急制动控制单元包括紧急制动电磁阀、保压电磁阀一、塞门一、塞门二、保压电磁阀二、塞门三、塞门四和塞门五。
16、一种基于制动机的自动驾驶用制动控制系统的轨道车,所述轨道车包括基于制动机的自动驾驶用制动控制系统。
17、本发明提供的技术方案,具有如下有益效果:
18、本发明提供的基于制动机的自动驾驶用制动控制系统及其轨道车解决了jz-7型空气制动机无法与自动驾驶系统配合使用的问题;本发明可以在原车jz-7型空气制动机配置不变的前提下,增加自动驾驶用制动控制系统,即可实现整车自动驾驶系统对制动控制的需求。
19、本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种基于制动机的自动驾驶用制动控制系统,其特征在于,该制动控制系统包括:电控单元、空气控制单元、空气制动系统状态监测单元和紧急制动控制单元;
2.如权利要求1所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述电控单元包括逻辑控制单元,设置在逻辑控制单元上的自动驾驶信号i/o端口、制动控制信号输出接口和制动系统状态信号输入接口。
3.如权利要求1所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述空气控制单元包括隔离塞门一、调压阀、制动电磁阀、缓解电磁阀、缓冲风缸、压力变送器二、压力变送器三和切换阀;隔离塞门一的输入接口与总风管连通;所述隔离塞门一的输出接口与调压阀输入接口连通;所述调压阀的输出接口与制动电磁阀的第一接口连通,所述制动电磁阀的第二接口与缓解电磁阀的第一接口连通,所述缓解电磁阀的第二接口与缩堵二的第一接口连通;所述制动电磁阀的第三接口与缩堵一的第一接口连通,缩堵一的第二接口与缓冲风缸的输入口和隔离塞门二第一接口连通,所述隔离塞门二的第二接口与切换阀的第一接口连通,所述切换阀的第二接口与jz-型空气制动系统单独作用管的入口连通;所述切换阀的第三接口与jz-型空气制动系统单独作用管的出口连通;其中,隔离塞门一的输入接口上设置有用于测压的压力变送器。
4.如权利要求3所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述隔离塞门二的第一接口上设置有用于测压的压力变送器三;所述隔离塞门二的第一接口上还设置有用于测压的压力变送器二。
5.如权利要求4所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述调压阀的输出接口处设置有测压接口一,缩堵一的第二接口上设置有测压接口二。
6.如权利要求5所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述空气控制单元还包括滤尘器,隔离塞门一的输入接口通过滤尘器与总风管连通;所述滤尘器的第一接口与总风管连通,所述滤尘器的第一接口与隔离塞门一的输入接口连通。
7.如权利要求1所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述空气制动系统状态监测单元,用于监测均衡风缸压力、列车管压力、总风压力和制动缸压力,并将监测到的压力信号反馈给所述电控单元。
8.如权利要求7所述的基于制动机的自动驾驶用制动控制系统,其特征在于,所述空气制动系统状态监测单元包括均衡风缸压力变送器一、均衡风缸压力变送器二、列车管压力变送器、总风压力变送器和制动缸压力变送器。
9.如权利要求1所述的基于制动机的自动驾驶用制动控制系统,其特征在于,紧急制动控制单元包括紧急制动电磁阀、保压电磁阀一、塞门一、塞门二、保压电磁阀二、塞门三、塞门四和塞门五。
10.一种基于制动机的自动驾驶用制动控制系统的轨道车,其特征在于,所述轨道车包括基于制动机的自动驾驶用制动控制系统。
技术总结
本发明涉及自动驾驶和电控制动技术领域,具体涉及基于制动机的自动驾驶用制动控制系统及其轨道车。该制动控制系统包括电控单元、空气控制单元、空气制动系统状态监测单元和紧急制动控制单元;电控单元用于接收自动驾驶系统输入的制动指令,经处理后输出制动、缓解和保压信号,并接收空气制动系统状态监测单元反馈的制动系统状态信号,将制动指令执行情况反馈给自动驾驶系统;空气控制单元用于执行电控单元输出的制动指令,实现制动缸压力的无级调节,并将制动缸压力信号反馈给电控单元;空气制动系统状态监测单元用于对制动系统各管路压力进行实时检测,并将检测到的压力信号反馈给电控单元。
技术研发人员:李随新,张乾宇,马成龙,张媛萍,朱世昌,张兵奇,李博,马超,张高锋,李华伟,朱红军
受保护的技术使用者:宝鸡中车时代工程机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!