基于多通道融合的轨道车辆车轮多边形检测方法及系统与流程
本发明属于轨道车辆检测,尤其涉及一种基于多通道融合的轨道车辆车轮多边形检测方法及系统。
背景技术:
1、列车在高速在运行时,车轮由于本身制造导致的偏心问题和轮轨摩擦,轨道激励等因素,易导致车轮半径沿圆周方向发生周期性磨耗,即为车轮多边形;由于车轮多边形会造成车辆运行时轮轨异常振动,导致列车零部件的松动与过早疲劳损伤,引起运行安全的隐患,同时也会造成列车上的乘客的不舒适。而目前对于轨边列车车轮多边形的检测,有直接测量车轮踏面与轮缘高差的位移量,有间接测量列车行进时轮轨接触造成的钢轨形变量,也有通过检测轮轨振动,使用加速度传感器在轨道边检测钢轨振动。
2、目前轨边检测列车车轮多边形(检测系统相对静止,车体运动),需要覆盖车轮踏面一周,而几乎没有机械结构能够满足约3米(周长)的连续测量。故基本都使用多通道的方式进行测量。多通道物理位置与车轮周向位置进行映射后,可拼接出车轮一周的连续波形。例如中国专利申请cn202310797604.2公开的公开了一种轨道车辆车轮踏面损伤检测系统及方法,该方法包括:利用位移传感器采集检测杆向下位移的数据;将检测杆沿长度分为n个采样段,并对n个采样段进行编号;所述采样段的长度为传感器两次采集的间隔时间与车轮当前速度的乘积;在检测杆上选择相邻位移传感器之间的任意点作为拼合点,计算拼合点所在的采样段的序号;将每个位移传感器前后拼合点之间的采样段归为该位移传感器所属;将每个位移传感器采集的有效数据进行拼合。
3、多通道物理位置与车轮周向位置进行映射后,可拼接出车轮一周的连续波形。使用拼接后的连续波形进行多边形识别(定性、定量),但存在以下缺点:
4、1)当采集信噪比较低时,无论单通道波形还是拼接波形,识别准确率均降低,有漏报风险;
5、2)动态测量系统,无论使用后期什么算法处理,在各通道拼接处必然存在拼接误差,即不同通道检测到的同一个车轮周向段的波形存在一定差异;
6、3)若其中某些通道异常,异物或干扰等,则会导致拼接后的多边形特征受到噪声污染,降低多边形特征识别准确率。
技术实现思路
1、有鉴于此,本发明提供一种基于多通道融合的轨道车辆车轮多边形检测方法及系统,无需信号拼接无需剔除噪声点,快速准确的判断车轮是否具有多边形。
2、为解决以上技术问题,本发明的技术方案为采用一种基于多通道融合的轨道车辆车轮多边形检测方法,包括:
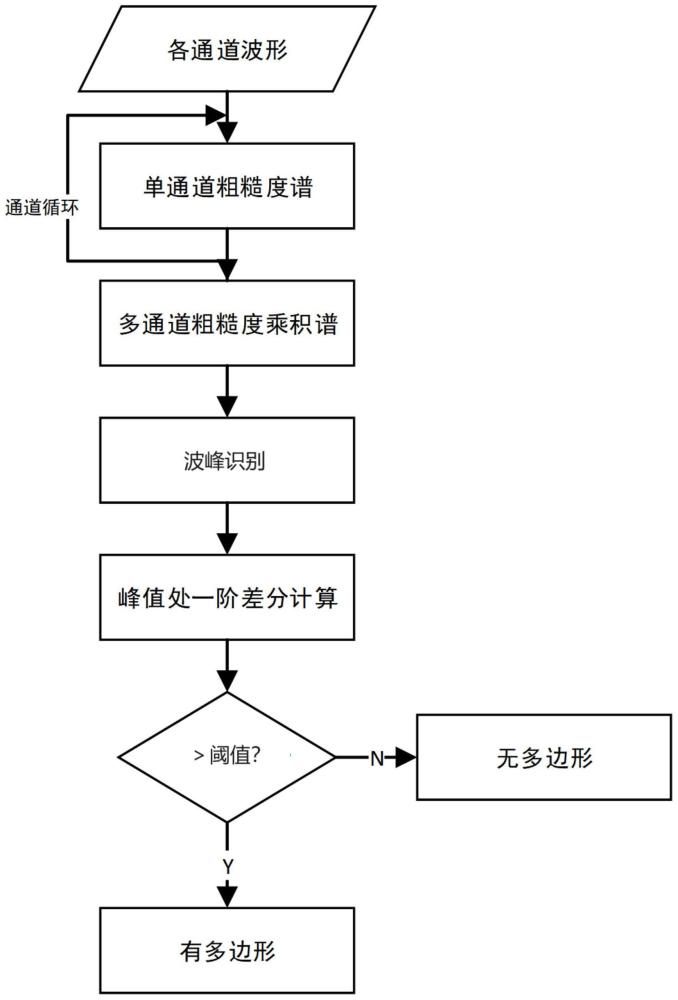
3、采集多通道波形并利用各通道波形计算各通道的粗糙度谱;
4、将所有通道的粗糙度谱进行点乘,获得粗糙度乘积谱;
5、从粗糙度乘积谱中识别出波峰点,并对识别出的波峰点进行一阶差分判别来判断车轮是否存在多边形。
6、作为一种改进,计算各通道的粗糙度谱的方法包括:
7、利用公式
8、
9、计算粗糙度谱,其中,为粗糙度谱,是车轮不圆度波形转频域后在1/3倍频程k中进行量化的值,为车轮粗糙度的参考值。
10、作为一种进一步的改进,所述粗糙度谱进行点乘的方法包括:
11、将所有粗糙度谱相同点序号的粗糙度值进行连乘获得该点序号的粗糙度乘积值;
12、将所有点获得的粗糙度乘积值组成粗糙度乘积谱。
13、作为另一种更进一步的改进,所述从粗糙度乘积谱中识别出波峰点的方法包括:
14、遍历粗糙度乘积谱中所有点的粗糙度乘积值,若某个点的粗糙度乘积值大于其前后点的粗糙度乘积值,则将该点标记为波峰点。
15、作为一种改进,在对某个点进行波峰判断时,预设间隔点位,并取该点前后间隔点位的点进行判断。
16、作为一种改进,所述对识别出的波峰进行一阶差分判别的方法包括:
17、将波峰点的粗糙度乘积值与其前方相邻的点作差,若差大于阈值则认为车轮具有多边形;或者,
18、将波峰点的粗糙度乘积值与其后方相邻的点作差,若差大于阈值则认为车轮具有多边形;或者,
19、将波峰点的粗糙度乘积值分别与其前方和后方相邻的点作差,若两个差均大于阈值则认为车轮具有多边形;或者,
20、将波峰点的粗糙度乘积值分别与其前方和后方相邻的点作差,若两个差的和大于阈值则认为车轮具有多边形。
21、作为一种改进,在对波峰点进行一阶差分判别时,预设间隔点位,并取该点前或/和后方间隔点位的点进行行一阶差分判别。
22、本发明还提供一种基于多通道融合的轨道车辆车轮多边形检测系统,包括:
23、粗糙度谱计算模块,用于利用各通道波形计算各通道的粗糙度谱;
24、点乘模块,用于将所有通道的粗糙度谱进行点乘,获得粗糙度乘积谱;
25、多边形判断模块,用于从粗糙度乘积谱中识别出波峰点,并对识别出的波峰点进行一阶差分判别来判断车轮是否存在多边形。
26、本发明还提供一种存储介质,所述存储介质内存储有程序,使得当该程序被执行时实现上述基于多通道融合的轨道车辆车轮多边形检测方法。
27、本发明还提供一种计算机系统,包括处理器、存储器;所述存储器内存储有计算机程序,使得当该计算机程序被处理器执行时,可实现上述基于多通道融合的轨道车辆车轮多边形检测方法。
28、本发明的有益之处在于:
29、本发明通过计算各个通道的粗糙度谱,通过点乘的方式将各个通道的粗糙图谱进行融合,从而放大了信噪比,使得代表多边形的波峰更加的突出,便于识别。
30、本发明在识别出波峰后,通过一阶差分判别来判断车轮是否存在多边形,从而过滤掉了噪声引起误差,使得最终对车轮多边形的判断更加的准确。
技术特征:
1.一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于包括:采集多通道波形并利用各通道波形计算各通道的粗糙度谱;
2.根据权利要求1所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于计算各通道的粗糙度谱的方法包括:
3.根据权利要求1所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于所述粗糙度谱进行点乘的方法包括:
4.根据权利要求1所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于所述从粗糙度乘积谱中识别出波峰点的方法包括:
5.根据权利要求4所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于:
6.根据权利要求1所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于所述对识别出的波峰进行一阶差分判别的方法包括:
7.根据权利要求1所述的一种基于多通道融合的轨道车辆车轮多边形检测方法,其特征在于:
8.一种基于多通道融合的轨道车辆车轮多边形检测系统,其特征在于包括:粗糙度谱计算模块,用于利用各通道波形计算各通道的粗糙度谱;
9.一种存储介质,其特征在于:所述存储介质内存储有程序,使得当该程序被执行时实现权利要求1~7中任意一项所述的基于多通道融合的轨道车辆车轮多边形检测方法。
10.一种计算机系统,其特征在于:包括处理器、存储器;所述存储器内存储有计算机程序,使得当该计算机程序被处理器执行时,可实现权利要求1~7中任意一项所述的基于多通道融合的轨道车辆车轮多边形检测方法。
技术总结
本发明属于轨道车辆检测技术领域,公开了一种基于多通道融合的轨道车辆车轮多边形检测方法及系统,该方法包括采集多通道波形并利用各通道波形计算各通道的粗糙度谱;将所有通道的粗糙度谱进行点乘,获得粗糙度乘积谱;从粗糙度乘积谱中识别出波峰点,并对识别出的波峰点进行一阶差分判别来判断车轮是否存在多边形。本发明通过计算各个通道的粗糙度谱,通过点乘的方式将各个通道的粗糙图谱进行融合,从而放大了信噪比,使得代表多边形的波峰更加的突出,便于识别。在识别出波峰后,通过一阶差分判别来判断车轮是否存在多边形,从而过滤掉了噪声引起误差,使得最终对车轮多边形的判断更加的准确。
技术研发人员:高德阳,王玉龙,戴永刚,谢宣,贾军战,陆波,张渝,赵波,王祯,彭建平
受保护的技术使用者:成都铁安科技有限责任公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!