一种基于列车轮缘交点检测的全车扫描方法及系统与流程
本发明涉及列车运行监测,尤其是一种基于列车轮缘交点检测的全车扫描方法及系统。
背景技术:
1、现阶段铁路系统日益发展,针对列车运行状态、运动参数的监控需求愈来愈多。例如:车辆磨损监测、车辆异常监测、车辆速度监测等等,提高自动检测识别列车各方面性能参数的准确性、效率,能够有效减少人工成本,对列车稳定安全运行起到了十分重要的作用。
2、列车速度监测是对列车运行的重要参数--速度进行的监控,现有的速度监测方式有雷达测速、地感线圈测速、视觉测速等;其中,雷达测速是利用雷达的多普勒效应分析被测物体返回的雷达波来测量车速,其对安装角度和安装距离有严格的要求;地感线圈测速需要在轨道底部预埋装备,基于磁性测量的准确性和时效性会不足;立体视觉测速能够很好地规避以上缺点,可以无接触地对被测物体进行测量,但是视觉测量也存在一些弊端:对光照环境非常敏感,不适用单调缺乏纹理的场景,因为双目视觉根据视觉特征进行图像匹配,特征不明显会导致匹配出错或者匹配失败,并且,视觉测量中计算复杂度较高,计算量大,对算力的要求较高。
技术实现思路
1、为解决上述问题,本发明提供一种结构合理的基于列车轮缘交点检测的全车扫描方法及系统,从而实现基于轮缘交点的二维图像测速,并集成了全车扫描,极大地提升、保证了运行效率,降低了硬件运算要求,还提升了系统整体的集成度。
2、本发明所采用的技术方案如下:
3、一种基于列车轮缘交点检测的全车扫描方法,包括如下步骤:
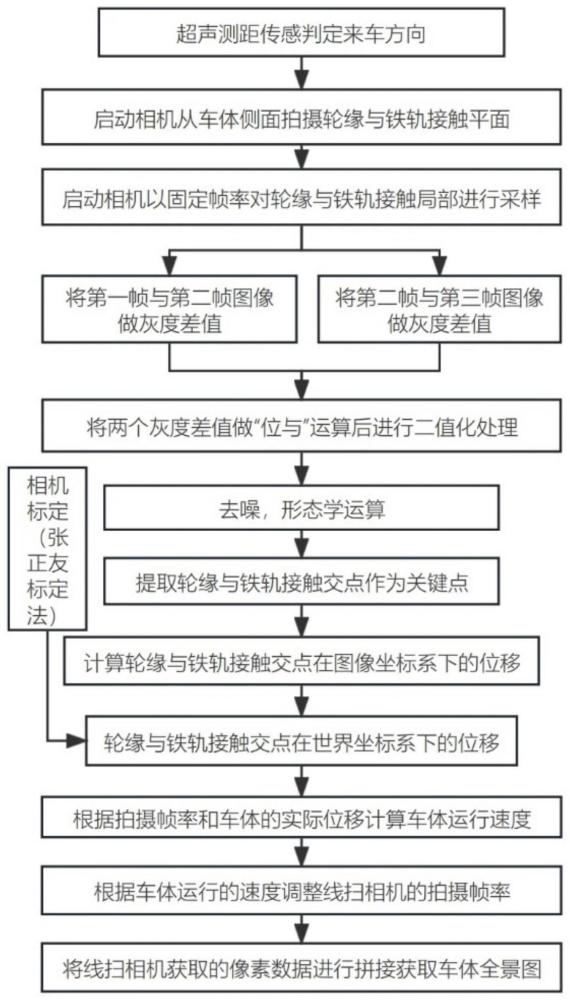
4、由超声测距传感器感知、判定来车方向;
5、由高帧率相机对列车轮缘与轨道接触位置进行采样;
6、对采样图像进行帧差法处理,提取轮缘与轨道交点作为关键点,由交点的实际位移结合拍摄帧率,获得列车实时的运行速度;
7、根据列车实时的运行速度,调整线扫相机实时的采集帧率;
8、由线扫相机对列车纵向像素进行采集,获得列车纵向图片像素集合,将线扫相机获取的图像进行拼接,获取全车全景图。
9、作为上述技术方案的进一步改进:
10、所述高帧率相机每获取三帧图片,就采用帧差法进行计算;在列车运行过程中,高帧率相机以固定帧率持续拍摄,以获得列车运行过程中实时的运行速度;根据列车实时的运行速度,及时调整控制线扫相机的采集帧率。
11、所述帧差法处理获得列车实时运行速度的方法,包括如下步骤:
12、对第一帧和第二帧的图片做灰度差值,对第二帧和第三帧的图片做灰度差值,将两个灰度差值进行位与,而后进行二值化处理、去噪和形态学运算;
13、提取图片中列车轮缘与轨道交点作为关键点,将关键点的图像位移转换为世界坐标系中的实际位移,以此表征列车的实际位移;
14、由列车的实际位移,结合高帧率相机的拍摄帧率,获得列车瞬时速度。
15、在高帧率相机使用前,采用张正友标定法进行标定,用于将图像坐标转换为世界坐标,获得标定后包括内参、外参和畸变参数在内的转换矩阵,根据转换矩阵,将关键点的图像位移转换为世界坐标系中的实际位移。
16、所述将线扫相机获取的图像进行拼接的方法为:利用opencv构建图片队列,将线扫相机采集的所有像素图片依次存入队列中;待线扫相机扫描结束后,将队列中的图片数据依次弹出,转换为mat对象后,利用pushback方法将图片像素依次拼接,获得列车车身的全车全景图。
17、在超声测距传感器监测到车辆靠近时,与列车车轮中心齐平的红外测距激光器工作;列车车轮经过红外测距激光器时,由红外测距激光器捕获到距离的改变并反馈给系统,触发高帧率相机工作。
18、所述红外测距激光器设置有两组,沿着列车运行的方向间隔布设,超声测距传感器设置有两组,分设于红外测距激光器两侧并分别朝向列车的来车方向;在列车经过触发一个红外测距激光器,到离开触发另一个红外测距激光器的时间范围内,高帧率相机持续拍摄并进行帧差法计算。
19、超声测距传感器感知到来车后,红外测距激光器由休眠转为苏醒状态;还包括红外相机,由红外相机感知周围有生生物,识别到有生生物经过时,报警并关闭红外测距激光器。
20、一种基于列车轮缘交点检测的全车扫描系统,包括:
21、超声测距传感器:以感知、判定来车方向;
22、红外测距激光器:由距离的改变感知列车车轮位置;
23、高帧率相机:对列车轮缘与轨道接触位置持续拍摄,以获得列车实时运行速度;
24、线扫相机:采集列车纵向像素;
25、红外相机:感知周围有生生物,识别并报警。
26、作为上述技术方案的进一步改进:
27、还包括箱体,箱体经由支架安装于轨道侧面外部;朝向轨道的箱体侧面上左右间隔安装有线扫相机和红外相机,线扫相机和红外相机间隔中部的下方安装有高帧率相机;位于高帧率相机两侧的箱体侧面上还安装有红外测距激光器,红外测距激光器的高度与列车车轮中心齐平;箱体相对的左右两侧分别安装有超声测距传感器。
28、与现有技术相比,本发明具有以下有益效果:
29、本发明构思巧妙、合理,通过由高帧率相机对列车轮缘与轨道接触位置进行采样,基于轮缘交点利用帧差法获得列车实时的运行速度,并实时调整线扫相机的采集帧率,由线扫相机的采集图片进行拼接获得全车全景图,从而在实现二维图像测速的同时,集成了全车扫描功能,极大地助力于列车运行状态的实时监控,不仅极大地提升、保证了运行效率,降低了硬件运算要求,还提升了系统整体的集成度;
30、本发明还包括如下优点:
31、全车扫描系统布设紧凑,占地空间小,移动灵活,机动性高,方便于实际使用。
技术特征:
1.一种基于列车轮缘交点检测的全车扫描方法,其特征在于:包括如下步骤:由超声测距传感器感知、判定来车方向;
2.如权利要求1所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:所述高帧率相机每获取三帧图片,就采用帧差法进行计算;在列车运行过程中,高帧率相机以固定帧率持续拍摄,以获得列车运行过程中实时的运行速度;根据列车实时的运行速度,及时调整控制线扫相机的采集帧率。
3.如权利要求2所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:所述帧差法处理获得列车实时运行速度的方法,包括如下步骤:
4.如权利要求3所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:在高帧率相机使用前,采用张正友标定法进行标定,用于将图像坐标转换为世界坐标,获得标定后包括内参、外参和畸变参数在内的转换矩阵,根据转换矩阵,将关键点的图像位移转换为世界坐标系中的实际位移。
5.如权利要求1所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:所述将线扫相机获取的图像进行拼接的方法为:利用opencv构建图片队列,将线扫相机采集的所有像素图片依次存入队列中;待线扫相机扫描结束后,将队列中的图片数据依次弹出,转换为mat对象后,利用pushback方法将图片像素依次拼接,获得列车车身的全车全景图。
6.如权利要求1所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:在超声测距传感器监测到车辆靠近时,与列车车轮中心齐平的红外测距激光器工作;列车车轮经过红外测距激光器时,由红外测距激光器捕获到距离的改变并反馈给系统,触发高帧率相机工作。
7.如权利要求6所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:所述红外测距激光器设置有两组,沿着列车运行的方向间隔布设,超声测距传感器设置有两组,分设于红外测距激光器两侧并分别朝向列车的来车方向;在列车经过触发一个红外测距激光器,到离开触发另一个红外测距激光器的时间范围内,高帧率相机持续拍摄并进行帧差法计算。
8.如权利要求6所述的一种基于列车轮缘交点检测的全车扫描方法,其特征在于:超声测距传感器感知到来车后,红外测距激光器由休眠转为苏醒状态;还包括红外相机,由红外相机感知周围有生生物,识别到有生生物经过时,报警并关闭红外测距激光器。
9.一种基于列车轮缘交点检测的全车扫描系统,其特征在于:包括:
10.如权利要求9所述的一种基于列车轮缘交点检测的全车扫描系统,其特征在于:还包括箱体,箱体经由支架安装于轨道侧面外部;朝向轨道的箱体侧面上左右间隔安装有线扫相机和红外相机,线扫相机和红外相机间隔中部的下方安装有高帧率相机;位于高帧率相机两侧的箱体侧面上还安装有红外测距激光器,红外测距激光器的高度与列车车轮中心齐平;箱体相对的左右两侧分别安装有超声测距传感器。
技术总结
本发明涉及一种基于列车轮缘交点检测的全车扫描方法及系统,包括:由超声测距传感器感知、判定来车方向;由高帧率相机对列车轮缘与轨道接触位置进行采样;对采样图像进行帧差法处理,提取轮缘与轨道交点作为关键点,由交点的实际位移结合拍摄帧率,获得列车实时的运行速度;根据列车实时的运行速度,调整线扫相机实时的采集帧率;由线扫相机对列车纵向像素进行采集,获得列车纵向图片像素集合,将线扫相机获取的图像进行拼接,获取全车全景图;从而实现基于轮缘交点的二维图像测速,并集成了全车扫描,极大地提升、保证了运行效率,降低了硬件运算要求,还提升了系统整体的集成度。
技术研发人员:赵凯旋
受保护的技术使用者:江苏集萃智能光电系统研究所有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!