一种具有防碰撞功能的轨道机械操作设备的制作方法
本技术属于铁路、轨道交通维护领域,具体涉及一种具有防碰撞功能的轨道机械操作设备。
背景技术:
1、在铁路和轨道交通系统中,常需要使用大型轨道机械设备进行施工,此时在操作过程中往往容易发生机械设备碰撞接触网杆等其他障碍物的情况,当情况严重时,会导致铁路事故。
2、而导致事故发生的原因通常如下:
3、1、通过人为观察进行提前干预,以避免碰撞发生,但是难免会有人员由于工作劳累而疏忽大意不能及时干预,或存在视觉死角导致不能及时发现潜在碰撞风险,致使干预失败导致碰撞。
4、2、机械操作设备不够灵活,无法及时避障导致碰撞。
5、故基于此,提出本实用新型技术方案。
技术实现思路
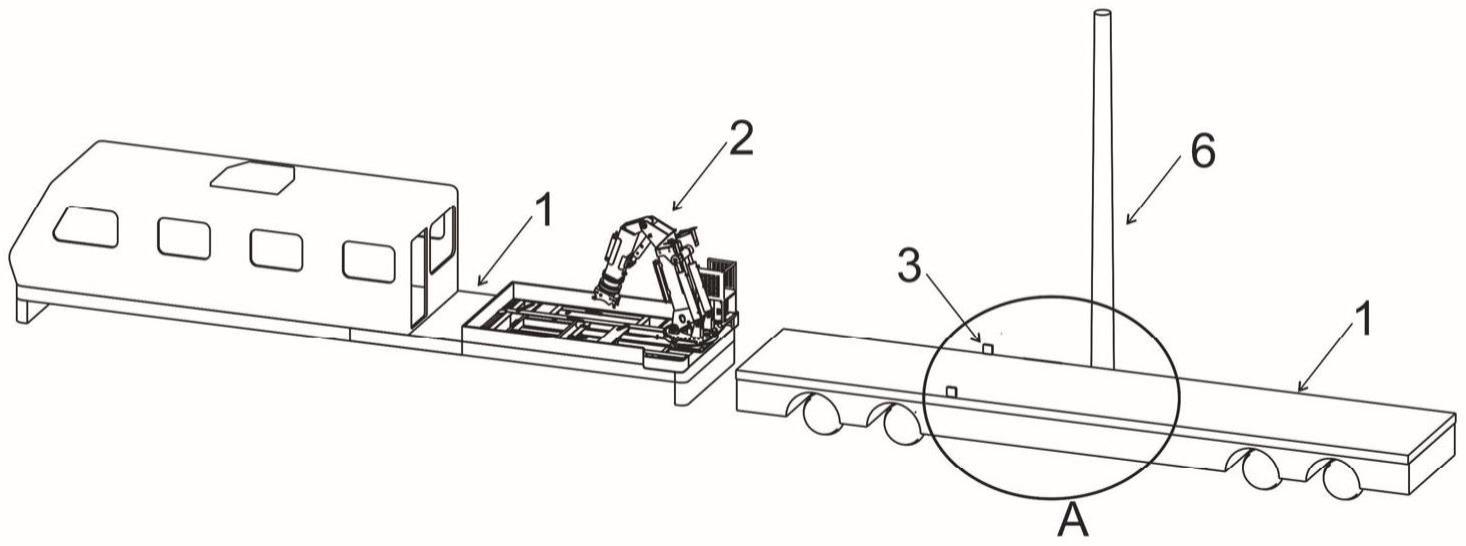
1、为了解决现有技术存在的问题,本实用新型提供了一种具有防碰撞功能的轨道机械操作设备,包括:
2、轨道车甲板;
3、机械操作臂,所述机械操作臂设置于所述轨道车甲板上部;所述机械操作臂包括旋转底盘、第一操作臂和第二操作臂;其中:
4、所述旋转底盘与所述第一操作臂可转动连接,以使所述第一操作臂相对所述旋转底盘进行俯仰运动,
5、所述第一操作臂与所述第二操作臂可转动连接,以使所述第二操作臂相对所述第一操作臂进行俯仰运动;
6、防碰撞装置,所述防碰撞装置设置于所述轨道车甲板上;所述防碰撞装置用于测量和/或限制所述机械操作臂至障碍物之间的距离,以使所述机械操作臂与所述障碍物保持安全距离从而不发生碰撞。
7、为便于理解本实用新型,对本实用新型的原理进行说明:
8、机械操作臂等大型设备在轨道上进行施工时,往往需要轨道车甲板作为承载平台,并且旋转底盘可以使得机械操作臂的主体按需进行转动,并配合旋转底盘与第一操作臂之间,以及第一操作臂和第二操作臂之间的俯仰运动来进行障碍物规避,避免碰撞;同时,防碰撞装置还能通过测量和/或限位来防止机械操作臂与障碍物碰撞,具有双重保险之效。
9、优选地,所述机械操作臂还包括第一伸缩机构;其中:
10、所述第一伸缩机构的一端与所述旋转底盘转动连接,所述第一伸缩机构的另一端与所述第一操作臂转动连接;
11、通过所述第一伸缩机构的往复伸缩以实现所述旋转底盘与所述第一操作臂之间的相对俯仰运动。
12、优选地,所述机械操作臂还包括第二伸缩机构;其中:
13、所述第二伸缩机构的一端与所述第一操作臂转动连接,所述第二伸缩机构的另一端与所述第二操作臂转动连接;
14、通过所述第二伸缩机构的往复伸缩以实现所述第一操作臂与所述第二操作臂之间的相对俯仰运动。
15、优选地,所述第一操作臂还包括内臂和外臂;其中:
16、所述外臂与所述内臂套设连接,所述内臂相对所述外臂进行伸缩运动,以使所述第一操作臂伸长或收缩。
17、优选地,所述防碰撞装置为激光传感装置;其中:
18、所述激光传感装置设置于所述轨道车甲板的两侧,所述激光传感装置用于发射激光以探测障碍物的位置距离,以使所述机械操作臂与所述障碍物保持安全距离从而不发生碰撞。
19、优选地,所述防碰撞装置为rfid标签识别装置,所述rfid标签识别装置包括rfid读码器和标签;其中:
20、所述rfid读码器设置于所述轨道车甲板上,所述标签设置于所述障碍物上,所述rfid读码器识别所述标签以使所述机械操作臂与所述障碍物保持安全距离从而不发生碰撞。
21、优选地,所述防碰撞装置为编码器测距装置;其中:
22、所述编码器测距装置设置于所述轨道机械操作设备的车轮上,通过测量所述轨道机械操作设备的行驶距离来判断所述机械操作臂至障碍物之间的距离,以使所述机械操作臂与所述障碍物保持安全距离从而不发生碰撞。
23、优选地,所述防碰撞装置为限位开关装置,所述限位开关装置包括接触杆;其中:
24、所述限位开关装置设置于所述轨道车甲板上,所述接触杆的一端与所述限位开关装置相连接,所述接触杆的另一端悬空并向外伸出;
25、当所述接触杆与所述障碍物碰撞,所述限位开关激活使所述轨道机械操作设备停止行驶,避免碰撞。
26、优选地,所述具有防碰撞功能的轨道机械操作设备,还包括第一锁环和第二锁环,其中:
27、所述第一锁环固定设置于所述旋转底盘上,所述第二锁环固定设置于所述轨道车甲板上;
28、所述第一锁环与所述第二锁环通过锁链连接,由于锁链长度限制,使得所述机械操作臂仅能在设定范围内进行旋转运动,从而确保所述机械操作臂与所述障碍物保持安全距离从而不发生碰撞。
29、本实用新型的有益效果为:
30、本实用新型所述具有防碰撞功能的轨道机械操作设备,能够通过测量机械操作臂与障碍物之间的距离和/或通过限制机械操作臂的活动范围,来确保机械操作臂与障碍物之间始终保持安全距离,进而避免碰撞等危险情况的发生;同时,能够旋转和俯仰运动的机械操作臂有更高的自由度,也能进行规避障碍物,确保安全不碰撞。
技术特征:
1.一种具有防碰撞功能的轨道机械操作设备,其特征在于,包括:
2.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述机械操作臂还包括第一伸缩机构;其中:
3.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述机械操作臂还包括第二伸缩机构;其中:
4.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述第一操作臂还包括内臂和外臂;其中:
5.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述防碰撞装置为激光传感装置;其中:
6.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述防碰撞装置为rfid标签识别装置,所述rfid标签识别装置包括rfid读码器和标签;其中:
7.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述防碰撞装置为编码器测距装置;其中:
8.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,所述防碰撞装置为限位开关装置,所述限位开关装置包括接触杆;其中:
9.根据权利要求1所述具有防碰撞功能的轨道机械操作设备,其特征在于,还包括第一锁环和第二锁环,其中:
技术总结
本技术涉及一种具有防碰撞功能的轨道机械操作设备,该设备包括轨道车甲板;机械操作臂,所述机械操作臂设置于所述轨道车甲板上部;所述机械操作臂包括旋转底盘、第一操作臂和第二操作臂;防碰撞装置,所述防碰撞装置设置于所述轨道车甲板上。本技术所述具有防碰撞功能的轨道机械操作设备,能够通过测量机械操作臂与障碍物之间的距离和/或通过限制机械操作臂的活动范围,来确保机械操作臂与障碍物之间始终保持安全距离,进而避免碰撞等危险情况的发生;同时,能够旋转和俯仰运动的机械操作臂有更高的自由度,也能进行规避障碍物,确保安全不碰撞。
技术研发人员:王先尧,陆园,张铮
受保护的技术使用者:一路行(北京)科技有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!