一种基于涵道风扇吸附式的墙面裂纹检测机器人的制作方法
本发明属于机器人设计技术领域,具体涉及一种基于涵道风扇吸附式的墙面裂纹检测机器人。
背景技术:
随着经济快速发展,很多的大型建筑的外墙检测维护需求也日益增多;大型建筑不同于罐体、管道,其表面有诸多连接过度部分,大大增加了检测维护难度;目前该类工作主要由人工代替,危险程度高,且效率很低。
技术实现要素:
本发明的目的在于提供一种基于涵道风扇吸附式的墙面裂纹检测机器人,有效的解决了现有大型建筑墙面裂纹检测不便的问题。
本发明采用的技术方案如下:
一种基于涵道风扇吸附式的墙面裂纹检测机器人,包括机器人主体,运动控制系统,图像采集系统与图像分析系统,所述机器人主体包括行星轮与负载板,行星轮有两个,且分别安装在负载板的两侧,负载板顶端安装有两个舵机,两个舵机分别控制其对应侧的行星轮运动,负载板顶端安装有涵道风扇,图像采集系统与分析系统安装在负载板底端,所述运动控制系统主要采用了avr架构单片机对涵道风扇与舵机进行控制。
优选的,所述的两个行星轮采用单臂两级齿轮,经两级啮合的异形轮式结构,两个行星轮的外侧采用海绵包裹。
优选的,所述的涵道风扇有四个,分别通过弹性橡胶圈固定在负载板上。
优选的,所述的舵机通过舵机支架与负载板固定连接。
优选的,所述的负载板下端安装有球形轮。
优选的,所述的运动控制系统包括航模电池、电调、无刷电机控制模块、降压模块、舵机控制模块与蓝牙模块,所述电调有四个,且分别与涵道风扇一一对应,航模电池给电调供电,电调经无刷电机模块控制涵道风扇转动,航模电池经降压模块将电压下降到舵机可使用的电压并给两个舵机供电,蓝牙模块接收到手机端的信号,根据收到的手机端信号输出到舵机控制模块,舵机控制模块控制舵机运动。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,涵道风扇将机器人主体吸附在墙面上,舵机控制行星轮带动机器人主体移动,机器人主体带动图像采集系统与图像分析系统对墙面进行拍照传输,降低人工的参与度,提高了工人的安全性,并提高了检测人员的工作效率。
2、本发明中,海绵的设置,增大了行星轮与墙壁的接触面积,提高了行星轮与墙面的摩擦系数,增加了机器人本体要移动的稳定性。
3、本发明中,运动控制系统的设置,便于远程操作机器人本体移动,提高了机器人本体的移动范围,降低了操作人员的工作难度。
附图说明
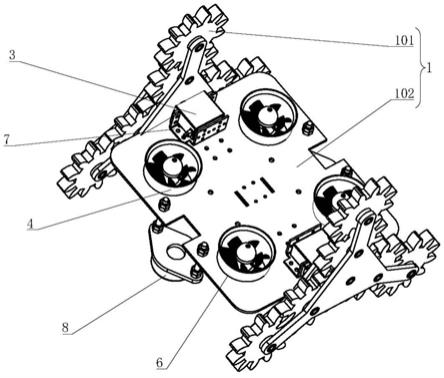
图1为本发明的轴测图。
图2为本发明的右视图。
图中标记:1机器人主体、2运动控制系统、101行星轮、102负载板、3舵机、4涵道风扇、5海绵、6弹性橡胶圈、7舵机支架、8球形轮、9航模电池。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
实施例1:
由图给出,一种基于涵道风扇4吸附式的墙面裂纹检测机器人,包括机器人主体1,运动控制系统2,图像采集系统与图像分析系统,所述机器人主体1包括行星轮101与负载板102,行星轮101有两个,且分别安装在负载板102的两侧,负载板102顶端安装有两个舵机3,两个舵机3分别控制其对应侧的行星轮101运动,负载板102顶端安装有涵道风扇4,图像采集系统与分析系统安装在负载板102底端,所述运动控制系统2主要采用了avr架构单片机对涵道风扇4与舵机3进行控制。
工作原理:使用控制系统控制涵道风扇4转动,将机器人主体1固定在墙面上,同时使用控制系统控制两个舵机3运动,两个舵机3分别带动其对应侧的行星轮101转动,行星轮101带动负载板102移动,从而使整个机器人主体1移动,在机器人本体移动的过程中,图像采集系统对墙面进行图像采集,最终有图像分析系统分析成像。
实施例2:
本实施例在实施例的基础上,优选的,由图给出,所述的两个行星轮101采用单臂两级齿轮,经两级啮合的异形轮式结构,两个行星轮101的外侧采用海绵5包裹。增加了与墙壁的接触面积,提高摩擦系数,便于带动机器人主体1移动。
实施例3:
本实施例在实施例的基础上,优选的,由图给出,所述的涵道风扇4有四个,分别通过弹性橡胶圈6固定在负载板102上,提高了涵道风扇4的吸力,便于将机器人主体1固定在墙壁上。
实施例4:
本实施例在实施例的基础上,优选的,由图给出,所述的负载板102下端安装有球形轮8。球形轮8可以抵消机器人本体的俯仰自由度,降低机器人的控制难度。
实施例5:
本实施例在实施例的基础上,优选的,由图给出,所述的运动控制系统2包括航模电池9、电调、无刷电机控制模块、降压模块、舵机控制模块与蓝牙模块,所述电调有四个,且分别与涵道风扇4一一对应,航模电池9给电调供电,电调经无刷电机模块控制涵道风扇4转动,航模电池9经降压模块将电压下降到舵机3可使用的电压并给两个舵机3供电,蓝牙模块接收到手机端的信号,根据收到的手机端信号输出到舵机控制模块,舵机控制模块控制舵机3运动。
工作原理:航模电池9给电调供电,电调经无刷电机模块控制涵道风扇4转动,涵道风扇4将机器人主体1固定在墙壁上,同时,航模电池9经降压模块将电压下降到舵机3可使用的电压并给两个舵机3供电,当蓝牙模块接收到手机端的信号,根据收到的手机端信号输出到舵机控制模块,舵机控制模块控制舵机3运动,例如:当蓝牙模块收到信号“1”时,舵机控制模块控制舵机3带动机器人主体1低速移动,当蓝牙模块收到信号“f”时,舵机控制模块控制舵机3带动机器人主体1向前移动。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于涵道风扇吸附式的墙面裂纹检测机器人,包括机器人主体(1),运动控制系统(2),图像采集系统与图像分析系统,其特征在于,所述机器人主体(1)包括行星轮(101)与负载板(102),行星轮(101)有两个,且分别安装在负载板(102)的两侧,负载板(102)顶端安装有两个舵机(3),两个舵机(3)分别控制其对应侧的行星轮(101)运动,负载板(102)顶端安装有涵道风扇(4),图像采集系统与分析系统安装在负载板(102)底端,所述运动控制系统(2)主要采用了avr架构单片机对涵道风扇(4)与舵机(3)进行控制。
2.根据权利要求1所述的一种基于涵道风扇吸附式的墙面裂纹检测机器人,其特征在于,所述的两个行星轮(101)采用单臂两级齿轮,经两级啮合的异形轮式结构,两个行星轮(101)的外侧采用海绵(5)包裹。
3.根据权利要求1所述的一种基于涵道风扇吸附式的墙面裂纹检测机器人,其特征在于,所述的涵道风扇(4)有四个,分别通过弹性橡胶圈(6)固定在负载板(102)上。
4.根据权利要求1所述的一种基于涵道风扇吸附式的墙面裂纹检测机器人,其特征在于,所述的舵机(3)通过舵机支架与负载板(102)固定连接。
5.根据权利要求1所述的一种基于涵道风扇吸附式的墙面裂纹检测机器人,其特征在于,所述的负载板(102)下端安装有球形轮(8)。
6.根据权利要求1所述的一种基于涵道风扇吸附式的墙面裂纹检测机器人,其特征在于,所述的运动控制系统(2)包括航模电池(9)、电调、无刷电机控制模块、降压模块、舵机控制模块与蓝牙模块,所述电调有四个,且分别与涵道风扇(4)一一对应,航模电池(9)给电调供电,电调经无刷电机模块控制涵道风扇(4)转动,航模电池(9)经降压模块将电压下降到舵机(3)可使用的电压并给两个舵机(3)供电,蓝牙模块接收到手机端的信号,根据收到的手机端信号输出到舵机控制模块,舵机控制模块控制舵机(3)运动。
技术总结
本发明公开了一种基于涵道风扇吸附式的墙面裂纹检测机器人,有效的解决了现有大型建筑墙面裂纹检测不便的问题;包括机器人主体,运动控制系统,图像采集系统与图像分析系统,所述机器人主体包括行星轮与负载板,行星轮有两个,且分别安装在负载板的两侧,负载板顶端安装有两个舵机,两个舵机分别控制其对应侧的行星轮运动,负载板顶端安装有涵道风扇,图像采集系统与分析系统安装在负载板底端,所述运动控制系统主要采用了AVR架构单片机对涵道风扇与舵机进行控制。
技术研发人员:金宏哲;赵杰;李长乐
受保护的技术使用者:洛阳尚奇机器人科技有限公司
技术研发日:2020.12.31
技术公布日:2021.06.01
- 还没有人留言评论。精彩留言会获得点赞!