一种并联四足机器狗
1.本实用新型属于机器人技术领域,涉及一种并联四足机器狗。更具体地,本实用新型涉及一种小型并联四足机器狗,该小型并联四足机器狗是以电动作为动力,以stm32单片机控制系统控制电机有效工作,结合平面二自由度五杆机构,来实现机器狗仿四足动物运动的一种仿生装置。
背景技术:
2.四足机器狗因其优越的地形适应能力,近年来一直是国内外的研究重点。其中美国波士顿动力公司(boston dynamics)的spot系列的机器狗已经开始商业化,支持订购;美国麻省理工学院(mit)的猎豹系列机器人(cheetah);国内宇树科技的xdog、浙江大学的“绝影”等相继出现。对于复杂狭小的地形(如室内、街道、石路等),小型并且运动灵活的四足机器人,像狗等四足动物,更加适合这种场合的应用。这些四足机器人采用串联结构,12自由度闭环控制。因此设计难度高、控制控制难度大、易累计误差、门槛较高。
技术实现要素:
3.本实用新型专利的目的在于:基于单片机控制技术、无刷电机控制技术,设计一种仿生并联四足机器狗,主要完成四足动物
‑
狗的对角行走方式完成行走动作。
4.本实用新型提供的并联四足机器狗包括4个二自由度五连杆机械腿ⅰ(第一机械腿
ⅰ‑
1、第二机械腿
ⅰ‑
2、第三机械腿
ⅰ‑
3和第四机械腿
ⅰ‑
4)、4个动力传动系统ⅱ(第一动力传动
ⅱ‑
1、第二动力传动
ⅱ‑
2、第三动力传动
ⅱ‑
3和第四动力传动
ⅱ‑
4)、stm32单片机控制系统ⅲ、机身ⅳ四大部分。其中,所述的stm32单片机控制系统ⅲ固定在机身ⅳ底部上方,4个独立的动力传动系统ⅱ分别设置在机身ⅳ内4个方位,呈前后左右对称分布,二自由度五连杆机械腿ⅰ设置在机身ⅳ下方,并连接在动力传动系统ⅱ的外侧。
5.所述机身ⅳ包括上板
ⅳ‑
3、底板
ⅳ‑
1和侧板
ⅳ‑
2,所述的上板
ⅳ‑
3、底板
ⅳ‑
1和侧板
ⅳ‑
2均为碳纤维板,上板
ⅳ‑
3和底板
ⅳ‑
1相互平行设置于上方及下方,二者垂直方向投影重叠,所述的侧板
ⅳ‑
2设置有两块,对称设置于上板
ⅳ‑
3和底板
ⅳ‑
1的两长边位置;上板
ⅳ‑
3、底板
ⅳ‑
1和两块侧板
ⅳ‑
2组成了机身ⅳ的框架结构。
6.每一个所述的动力传动系统ⅱ包括2个直流无刷减速电机
ⅱ‑1‑
1、电机支架
ⅱ‑1‑
2、2个梅花桩联轴器
ⅱ‑1‑
3、第一轴承座
ⅱ‑1‑
4、第二轴承座
ⅱ‑1‑
9、4个卡簧
ⅱ‑1‑
5、4个轴承
ⅱ‑1‑
6、2个第一轴套
ⅱ‑1‑
7、2个第二轴套
ⅱ‑1‑
8;其中,在机身ⅳ中,每个动力传动系统ⅱ的电机支架
ⅱ‑1‑
2、第一轴承座
ⅱ‑1‑
4和第二轴承座
ⅱ‑1‑
8由内至外依次设置于上板
ⅳ‑
3和底板
ⅳ‑
1之间,具体地,通过螺丝钉将电机支架
ⅱ‑1‑
2、第一轴承座
ⅱ‑1‑
4和第二轴承座
ⅱ‑1‑
8的上、下面分别固定在上板
ⅳ‑
3和底板
ⅳ‑
1上。并且,位于同侧的两个第二轴承座
ⅱ‑1‑
8的外端面上固定侧板
ⅳ‑
2。
7.所述的直流无刷减速电机
ⅱ‑1‑
1固定在电机支架
ⅱ‑1‑
2上,通过梅花桩联轴器
ⅱ‑1‑
3将直流无刷减速电机
ⅱ‑1‑
1的输出轴与二自由度五连杆机械腿ⅰ的传动轴
ⅰ‑1‑
9连
接。
8.所述的传动轴
ⅰ‑1‑
9的短轴端与第一轴套
ⅱ‑1‑
7、轴承
ⅱ‑1‑
6内圈间隙配合,轴承
ⅱ‑1‑
6外圈与第一轴承座
ⅱ‑1‑
4间隙配合,并由卡簧
ⅱ‑1‑
5固定。
9.具体地,传动轴
ⅰ‑1‑
9的短轴端的轴肩与第一轴套
ⅱ‑1‑
7的一端接触,第一轴套
ⅱ‑1‑
7的另一端与轴承
ⅱ‑1‑
6的内圈接触,轴承
ⅱ‑1‑
6的外圈与卡簧
ⅱ‑1‑
5接触,卡簧
ⅱ‑1‑
5将轴承
ⅱ‑1‑
6外圈固定在第一轴承座
ⅱ‑1‑
4上。
10.同样地,所述的传动轴
ⅰ‑1‑
9的长轴端与第二轴套
ⅱ‑1‑
8、轴承的内圈间隙配合,轴承的外圈与第二轴承座
ⅱ‑1‑
9间隙配合,并由卡簧固定。
11.具体地,传动轴
ⅰ‑1‑
9长轴端的轴肩与第二轴套
ⅱ‑1‑
8的一端接触,第二轴套
ⅱ‑1‑
8的另一端与轴承的内圈接触,轴承的外圈与卡簧接触,卡簧将轴承的外圈固定在第二轴承座
ⅱ‑1‑
9上。
12.每一个所述的二自由度五连杆机械腿ⅰ包括足部
ⅰ‑1‑
1、第一小腿
ⅰ‑1‑
2、第二小腿
ⅰ‑1‑
3、轴肩螺栓组
ⅰ‑1‑
4、机械腿轴承
ⅰ‑1‑
5、第一大腿
ⅰ‑1‑
6、圆柱销
ⅰ‑1‑
7、第二大腿
ⅰ‑1‑
8和传动轴
ⅰ‑1‑
9;所述的足部
ⅰ‑1‑
1是由橡胶材料制成,直接粘附在第一小腿
ⅰ‑1‑
2的近足端末端处。
13.所述的第一大腿
ⅰ‑1‑
6、第一小腿
ⅰ‑1‑
2、第二小腿
ⅰ‑1‑
3和第二大腿
ⅰ‑1‑
8依次连接,连接处通过过盈配合连接机械腿轴承
ⅰ‑1‑
5,并配合轴肩螺栓组
ⅰ‑1‑
4依次串联固定,所述的第一大腿
ⅰ‑1‑
6和第二大腿
ⅰ‑1‑
8分别与连接于同一动力传动系统ⅱ的两个直流无刷减速电机
ⅱ‑1‑
1的两个传动轴
ⅰ‑1‑
9相连接,且位于第一轴承座
ⅱ‑1‑
4与第二轴承座
ⅱ‑1‑
8之间。
14.具体地,第一大腿
ⅰ‑1‑
6的两端分别设置有连接孔和通孔,同样地,第二大腿
ⅰ‑1‑
8的两端分别设置有连接孔和通孔。第一小腿
ⅰ‑1‑
2的近足端及远足端均设置有一连接孔,第二小腿
ⅰ‑1‑
3的两端均设置有一连接孔。
15.其中,第一大腿
ⅰ‑1‑
6的连接孔与第一小腿
ⅰ‑1‑
2的远足端连接孔连接,第一小腿
ⅰ‑1‑
2的近足端连接孔与第二小腿
ⅰ‑1‑
3的一端连接孔连接,第二小腿
ⅰ‑1‑
3的另一端连接孔与第二大腿
ⅰ‑1‑
8的连接孔连接。腿部的各连接孔均为阶梯孔,腿部各连接处设置有机械腿轴承
ⅰ‑1‑
5,机械腿轴承
ⅰ‑1‑
5的外圈端面与各连接孔(阶梯孔)的阶梯面接触;轴肩螺栓组
ⅰ‑1‑
4与机械腿轴承
ⅰ‑1‑
5的内圈间隙配合。第一大腿
ⅰ‑1‑
6、第二大腿
ⅰ‑1‑
8的通孔分别与两传动轴
ⅰ‑1‑
9间隙配合,并通过圆柱销
ⅰ‑1‑
7固定。
16.所述的stm32单片机控制系统ⅲ包括stm32控制板
ⅲ‑
1、电池
ⅲ‑
2、陀螺仪
ⅲ‑
3和8个c620无刷电机调速器
ⅲ‑
4;其中,stm32控制板
ⅲ‑
1固定在底板
ⅳ‑
1中间段的一侧,电池
ⅲ‑
2、陀螺仪
ⅲ‑
3固定在底板
ⅳ‑
1中间段的中心位置,c620无刷电机调速器
ⅲ‑
4固定在底板
ⅳ‑
1中间段的另一侧;stm32控制板
ⅲ‑
1与电池
ⅲ‑
2连接,由电池
ⅲ‑
2为并联四足机器狗供电;stm32控制板
ⅲ‑
1与陀螺仪
ⅲ‑
3连接,以读取陀螺仪
ⅲ‑
3的信号,具体地,stm32单片机通过数据线读取陀螺仪
ⅲ‑
3的信号;stm32控制板
ⅲ‑
1与各c620无刷电机调速器
ⅲ‑
4连接,各c620无刷电机调速器
ⅲ‑
4与各直流无刷减速电机
ⅱ‑1‑
1一一对应连接,以通过stm32单片机控制各c620无刷电机调速器
ⅲ‑
4,进而控制各直流无刷减速电机
ⅱ‑1‑
1。
17.进一步地,通过调整第一大腿
ⅰ‑1‑
6的通孔和第二大腿
ⅰ‑1‑
8的通孔与不同的传动轴
ⅰ‑1‑
9相连接(同一动力传动系统ⅱ的两个直流无刷减速电机
ⅱ‑1‑
1的两个传动轴
ⅰ‑1‑
9),使得4个二自由度五连杆机械腿ⅰ实际的安装布置方式,划分为2种:
①
:前机械腿的足端朝向前,后机械腿的足端朝向后,这种安装布置方式使四足机器狗具有较好的被控性能。选用
①
这种布置方式,是因为在四足机器人典型的对角步态时,机器人的左前腿与右后腿和右前腿模块与左后腿的运动是关于机器狗中心完全对称的,而且足端支撑的范围较大。
②
:前机械腿的足端朝向前,后机械腿的足端朝向前,当为了提升机器狗行走的速度、提高跳跃性能时,选用
②
这种布置方式,是因为两连杆腿在动力学上的特点,使得这种结构形式有利于提升机器狗在行走、跳跃等步态的性能。
18.进一步地,本实用新型提供的并联四足机器狗的动力传动系统ⅱ中的8个直流无刷减速电机
ⅱ‑1‑
1与stm32单片机控制系统ⅲ中的8个c620无刷电机调速器
ⅲ‑
4一一对应,各c620无刷电机调速器
ⅲ‑
4对各自对应的直流无刷减速电机
ⅱ‑1‑
1的调速,stm32单片机获取陀螺仪
ⅲ‑
3中的位姿信号集中控制各个c620无刷电机调速器
ⅲ‑
4。使用stm32单片机控制直流无刷减速电机
ⅱ‑1‑
1,系统构成简单,可靠性高,抗干扰能力强;并且扩展容易,便于搭载其他设备。
19.进一步地,本实用新型提供的并联四足机器狗的直流无刷减速电机
ⅱ‑1‑
1采用闭环控制技术,以实现对电机的力矩控制、速度控制、位置控制;所述的直流无刷减速电机
ⅱ‑1‑
1设有霍尔编码器和温度传感器,以使直流无刷减速电机
ⅱ‑1‑
1具有温度感知功能,防止电机过热;并且,所述的直流无刷减速电机
ⅱ‑1‑
1允许实施超额定电流驱动,使直流无刷减速电机
ⅱ‑1‑
1瞬时获得较大的驱动电流而瞬时输出较大的力矩;超额定电流工作的直流无刷减速电机
ⅱ‑1‑
1,可以提升机器狗腿部间歇性发力运动步态下(跳跃)的性能。
20.本实用新型与现有技术相比,具有下述优点:机器狗由电动系统、二自由度五连杆机构、stm32单片机控制系统有机结合而成,该设计体现了用简单的设计原理来完成复杂动作的理念;设计合理,结构简单,模块集成度高;与其他驱动方式比较,电动具有安装方便、实用性强、驱动精确度高、控制调速方便等优点。与其他串联机器狗相比较,本实用新型的并联四足机器狗重负荷比小,且具有精度高,强度大、刚度大、承载能力强,无累计误差、便于控制等特点。
附图说明
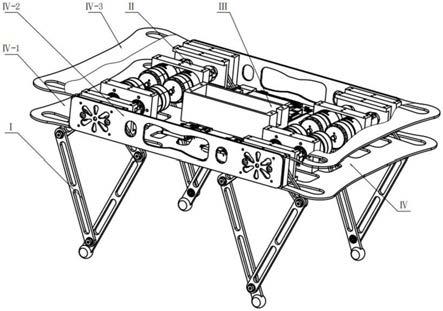
21.图1是本实用新型的并联四足机器狗的整体轴测图;
22.图2是本实用新型的并联四足机器狗的俯视内部图;
23.图3是本实用新型的并联四足机器狗的腿部和动力及其传动的爆炸图;
24.图4是本实用新型的并联四足机器狗的支撑相机械腿的机构简图;
25.图5是本实用新型的并联四足机器狗的摆动相机械腿的机构简图;
26.图6是本实用新型的并联四足机器狗的4条腿的一种布置方式的示意图;
27.图7是本实用新型的并联四足机器狗的4条腿的另一种布置方式的示意图。
28.图中:
[0029]ⅰ二自由度五连杆机械腿;ⅱ动力传动系统;ⅲstm32单片机控制系统;ⅳ机身;
[0030]
ⅰ‑1‑
1足部;
ⅰ‑1‑
2第一小腿;
ⅰ‑1‑
3第二小腿;
ⅰ‑1‑
4轴肩螺丝组;
ⅰ‑1‑
5机械腿轴承;
ⅰ‑1‑
6第一大腿;
ⅰ‑1‑
7圆柱销;
ⅰ‑1‑
8第二大腿;
ⅰ‑1‑
9传动轴;
[0031]
ⅱ‑1‑
1直流无刷减速电机;
ⅱ‑1‑
2电机支架;
ⅱ‑1‑
3梅花桩联轴器;
ⅱ‑1‑
4第一轴
承座;
ⅱ‑1‑
5卡簧;
ⅱ‑1‑
6轴承;
ⅱ‑1‑
7第一轴套;
ⅱ‑1‑
8第二轴套;
ⅱ‑1‑
9第二轴承座;
[0032]
ⅰ‑
1第一机械腿;
ⅰ‑
2第二机械腿;
ⅰ‑
3第三机械腿;
ⅰ‑
4第四机械腿;
[0033]
ⅱ‑
1第一动力传动;
ⅱ‑
2第二动力传动;
ⅱ‑
3第三动力传动;
ⅱ‑
4第四动力传动;
[0034]
ⅲ‑
1stm32控制板;
ⅲ‑
2电池;
ⅲ‑
3陀螺仪;
ⅲ‑
4c620无刷电机调速器;
[0035]
ⅳ‑
1底板;
ⅳ‑
2侧板;
ⅳ‑
3上板。
具体实施方式
[0036]
下述各实施例仅用于说明本实用新型,其中各部件的结构、连接方式和制作工艺等都是可以有所变化的,凡是在本实用新型技术方案的基础上进行的等同变换和改进,均不应排除在本实用新型的保护范围之外。
[0037]
图1是本实用新型的并联四足机器狗的整体轴测图;图2是本实用新型的并联四足机器狗的俯视内部图;图3是本实用新型的并联四足机器狗的腿部和动力及其传动的爆炸图。参见图1至图3,在本实施例中提供的并联四足机器狗包括4个二自由度五连杆机械腿ⅰ(第一机械腿
ⅰ‑
1、第二机械腿
ⅰ‑
2、第三机械腿
ⅰ‑
3和第四机械腿
ⅰ‑
4)、4个动力传动系统ⅱ(第一动力传动
ⅱ‑
1、第二动力传动
ⅱ‑
2、第三动力传动
ⅱ‑
3和第四动力传动
ⅱ‑
4)、stm32单片机控制系统ⅲ、机身ⅳ四大部分。其中,所述的stm32单片机控制系统ⅲ固定在机身ⅳ底部上方,4个独立的动力传动系统ⅱ分别设置在机身ⅳ内4个方位,呈前后左右对称分布,二自由度五连杆机械腿ⅰ设置在机身ⅳ下方,并连接在动力传动系统ⅱ的外侧。
[0038]
所述机身ⅳ包括上板
ⅳ‑
3、底板
ⅳ‑
1和侧板
ⅳ‑
2,所述的上板
ⅳ‑
3、底板
ⅳ‑
1和侧板
ⅳ‑
2均为碳纤维板,上板
ⅳ‑
3和底板
ⅳ‑
1相互平行设置于上方及下方,二者垂直方向投影重叠,所述的侧板
ⅳ‑
2设置有两块,对称设置于上板
ⅳ‑
3和底板
ⅳ‑
1的两长边位置;上板
ⅳ‑
3、底板
ⅳ‑
1和两块侧板
ⅳ‑
2组成了机身ⅳ的框架结构。
[0039]
每一个所述的动力传动系统ⅱ包括2个直流无刷减速电机
ⅱ‑1‑
1、电机支架
ⅱ‑1‑
2、2个梅花桩联轴器
ⅱ‑1‑
3、第一轴承座
ⅱ‑1‑
4、第二轴承座
ⅱ‑1‑
9、4个卡簧
ⅱ‑1‑
5、4个轴承
ⅱ‑1‑
6、2个第一轴套
ⅱ‑1‑
7、2个第二轴套
ⅱ‑1‑
8;其中,在机身ⅳ中,每个动力传动系统ⅱ的电机支架
ⅱ‑1‑
2、第一轴承座
ⅱ‑1‑
4和第二轴承座
ⅱ‑1‑
8由内至外依次设置于上板
ⅳ‑
3和底板
ⅳ‑
1之间,具体地,通过螺丝钉将电机支架
ⅱ‑1‑
2、第一轴承座
ⅱ‑1‑
4和第二轴承座
ⅱ‑1‑
8的上、下面分别固定在上板
ⅳ‑
3和底板
ⅳ‑
1上。并且,位于同侧的两个第二轴承座
ⅱ‑1‑
8的外端面上固定侧板
ⅳ‑
2。
[0040]
所述的直流无刷减速电机
ⅱ‑1‑
1固定在电机支架
ⅱ‑1‑
2上,通过梅花桩联轴器
ⅱ‑1‑
3将直流无刷减速电机
ⅱ‑1‑
1的输出轴与二自由度五连杆机械腿ⅰ的传动轴
ⅰ‑1‑
9连接。
[0041]
所述的传动轴
ⅰ‑1‑
9的短轴端与第一轴套
ⅱ‑1‑
7、轴承
ⅱ‑1‑
6内圈间隙配合,轴承
ⅱ‑1‑
6外圈与第一轴承座
ⅱ‑1‑
4间隙配合,并由卡簧
ⅱ‑1‑
5固定。
[0042]
具体地,传动轴
ⅰ‑1‑
9的短轴端的轴肩与第一轴套
ⅱ‑1‑
7的一端接触,第一轴套
ⅱ‑1‑
7的另一端与轴承
ⅱ‑1‑
6的内圈接触,轴承
ⅱ‑1‑
6的外圈与卡簧
ⅱ‑1‑
5接触,卡簧
ⅱ‑1‑
5将轴承
ⅱ‑1‑
6外圈、第一轴承座
ⅱ‑1‑
4固定。
[0043]
同样地,所述的传动轴
ⅰ‑1‑
9的长轴端与第二轴套
ⅱ‑1‑
8、轴承的内圈间隙配合,轴承的外圈与第二轴承座
ⅱ‑1‑
9间隙配合,并由卡簧固定。
[0044]
具体地,传动轴
ⅰ‑1‑
9长轴端的轴肩与第二轴套
ⅱ‑1‑
8的一端接触,第二轴套
ⅱ‑1‑
8的另一端与轴承的内圈接触,轴承的外圈与卡簧接触,卡簧将轴承的外圈、第二轴承座
ⅱ‑1‑
9固定。
[0045]
每一个所述的二自由度五连杆机械腿ⅰ包括足部
ⅰ‑1‑
1、第一小腿
ⅰ‑1‑
2、第二小腿
ⅰ‑1‑
3、轴肩螺栓组
ⅰ‑1‑
4、机械腿轴承
ⅰ‑1‑
5、第一大腿
ⅰ‑1‑
6、圆柱销
ⅰ‑1‑
7、第二大腿
ⅰ‑1‑
8和传动轴
ⅰ‑1‑
9;所述的足部
ⅰ‑1‑
1是由橡胶材料制成,直接粘附在第一小腿
ⅰ‑1‑
2的近足端末端处。
[0046]
所述的第一大腿
ⅰ‑1‑
6、第一小腿
ⅰ‑1‑
2、第二小腿
ⅰ‑1‑
3和第二大腿
ⅰ‑1‑
8依次连接,连接处通过过盈配合连接机械腿轴承
ⅰ‑1‑
5,并配合轴肩螺栓组
ⅰ‑1‑
4依次串联固定,所述的第一大腿
ⅰ‑1‑
6和第二大腿
ⅰ‑1‑
8分别与连接于同一动力传动系统ⅱ的两个直流无刷减速电机
ⅱ‑1‑
1的两个传动轴
ⅰ‑1‑
9相连接,且位于第一轴承座
ⅱ‑1‑
4与第二轴承座
ⅱ‑1‑
8之间。
[0047]
具体地,第一大腿
ⅰ‑1‑
6的两端分别设置有连接孔和通孔,同样地,第二大腿
ⅰ‑1‑
8的两端分别设置有连接孔和通孔。第一小腿
ⅰ‑1‑
2的近足端及远足端均设置有一连接孔,第二小腿
ⅰ‑1‑
3的两端均设置有一连接孔。
[0048]
其中,第一大腿
ⅰ‑1‑
6的连接孔与第一小腿
ⅰ‑1‑
2的远足端连接孔连接,第一小腿
ⅰ‑1‑
2的近足端连接孔与第二小腿
ⅰ‑1‑
3的一端连接孔连接,第二小腿
ⅰ‑1‑
3的另一端连接孔与第二大腿
ⅰ‑1‑
8的连接孔连接。腿部的各连接孔均为阶梯孔,腿部各连接处设置有机械腿轴承
ⅰ‑1‑
5,机械腿轴承
ⅰ‑1‑
5的外圈端面与各连接孔(阶梯孔)的阶梯面接触;轴肩螺栓组
ⅰ‑1‑
4与机械腿轴承
ⅰ‑1‑
5的内圈间隙配合。第一大腿
ⅰ‑1‑
6、第二大腿
ⅰ‑1‑
8的通孔分别与两传动轴
ⅰ‑1‑
9间隙配合,并通过圆柱销
ⅰ‑1‑
7固定。
[0049]
所述的stm32单片机控制系统ⅲ包括stm32控制板
ⅲ‑
1、电池
ⅲ‑
2、陀螺仪
ⅲ‑
3和8个c620无刷电机调速器
ⅲ‑
4;其中,stm32控制板
ⅲ‑
1固定在底板
ⅳ‑
1中间段的一侧,电池
ⅲ‑
2、陀螺仪
ⅲ‑
3固定在底板
ⅳ‑
1中间段的中心位置,c620无刷电机调速器
ⅲ‑
4固定在底板
ⅳ‑
1中间段的另一侧;stm32控制板
ⅲ‑
1与电池
ⅲ‑
2电连接,由电池
ⅲ‑
2为并联四足机器狗供电;stm32控制板
ⅲ‑
1与陀螺仪
ⅲ‑
3连接,以读取陀螺仪
ⅲ‑
3的信号,具体地,stm32单片机通过数据线读取陀螺仪
ⅲ‑
3的信号;stm32控制板
ⅲ‑
1与各c620无刷电机调速器
ⅲ‑
4连接,各c620无刷电机调速器
ⅲ‑
4与各直流无刷减速电机
ⅱ‑1‑
1一一对应连接,以通过stm32单片机控制各c620无刷电机调速器
ⅲ‑
4,进而控制各直流无刷减速电机
ⅱ‑1‑
1。
[0050]
进一步地,通过调整第一大腿
ⅰ‑1‑
6的通孔和第二大腿
ⅰ‑1‑
8的通孔与不同的传动轴
ⅰ‑1‑
9相连接(同一动力传动系统ⅱ的两个直流无刷减速电机
ⅱ‑1‑
1的两个传动轴
ⅰ‑1‑
9),使得4个二自由度五连杆机械腿ⅰ实际的安装布置方式,划分为2种:
①
:前机械腿的足端朝向前,后机械腿的足端朝向后(如图7所示),这种安装布置方式使四足机器狗具有较好的被控性能。选用
①
这种布置方式,是因为在四足机器人典型的对角步态时,机器人的左前腿与右后腿和右前腿模块与左后腿的运动是关于机器狗中心完全对称的,而且足端支撑的范围较大。
②
:前机械腿的足端朝向前,后机械腿的足端朝向前(如图6所示),当为了提升机器狗行走的速度、提高跳跃性能时,选用
②
这种布置方式,是因为两连杆腿在动力学上的特点,使得这种结构形式有利于提升机器狗在行走、跳跃等步态的性能。
[0051]
进一步地,本实用新型提供的并联四足机器狗的动力传动系统ⅱ中的8个直流无
刷减速电机
ⅱ‑1‑
1与stm32单片机控制系统ⅲ中的8个c620无刷电机调速器
ⅲ‑
4一一对应,各c620无刷电机调速器
ⅲ‑
4对各自对应的直流无刷减速电机
ⅱ‑1‑
1的调速,stm32单片机获取陀螺仪
ⅲ‑
3中的位姿信号集中控制各个c620无刷电机调速器
ⅲ‑
4。使用stm32单片机控制直流无刷减速电机
ⅱ‑1‑
1,系统构成简单,可靠性高,抗干扰能力强;并且扩展容易,便于搭载其他设备。
[0052]
进一步地,本实用新型提供的并联四足机器狗的直流无刷减速电机
ⅱ‑1‑
1采用闭环控制技术,以实现对电机的力矩控制、速度控制、位置控制;所述的直流无刷减速电机
ⅱ‑1‑
1设有霍尔编码器和温度传感器,以使直流无刷减速电机
ⅱ‑1‑
1具有温度感知功能,防止电机过热;并且,所述的直流无刷减速电机
ⅱ‑1‑
1允许实施超额定电流驱动,使直流无刷减速电机
ⅱ‑1‑
1瞬时获得较大的驱动电流而瞬时输出较大的力矩;超额定电流工作的直流无刷减速电机
ⅱ‑1‑
1,可以提升机器狗腿部间歇性发力运动步态下(跳跃)的性能。
[0053]
本实用新型的原理及操作过程分述如下:本实用新型依据仿生学原理,模仿四足动物对角步态的行走动作、四足动物的跳跃来设计机器狗的运动动作,使机器狗能够简捷而且有效的实现规定动作。用电池
ⅲ‑
2作为动力源,采用stm32单片机系统
ⅲ‑
1控制直流无刷减速电机
ⅱ‑1‑
1的转动,驱动第一大腿
ⅰ‑1‑
6、第二大腿
ⅰ‑1‑
8摆动完成运动动作。
[0054]
并联四足机器狗的行走动作主要由支撑相和摆动相两个相位同时采用周期调度来实现,采用对角步态(即四足对角的机械腿相位相同)完成直行,左右转向(即内侧机械腿步幅或频率低于外侧),以及原地转向(即四足对角的机械腿相位相反)。
[0055]
图4是本实用新型的并联四足机器狗的支撑相机械腿的机构简图;图5是本实用新型的并联四足机器狗的摆动相机械腿的机构简图;参见图4和图5,下面具体描述支撑相和摆动相的功能:
[0056]
1.支撑相起支撑整个机体的作用;
[0057]
2.摆动相起机器狗向期望方向的跨腿以保证机器狗的持续运动的作用;
[0058]
下面将详细阐述机器狗的行走的具体动作。
[0059]
1.支撑相动作
[0060]
机械腿简化成对称式五连杆结构,l1、l2分别为主动臂;l3、l4为从动臂;点p为足端,根据l1、l2按顺时针转动时,保持足端p在一条直线上移动且距离机架的高度恒定不变,支撑整个机身的高度恒定不变,即为并联四足机器狗的支撑相动作。
[0061]
以第一机械腿
ⅰ‑
1为例详细阐述机械腿支撑相动作:stm32单片机
ⅲ‑
1发送信号给c620无刷电机调速器
ⅲ‑
4使其控制直流无刷减速电机
ⅱ‑1‑
1顺时针转动,梅花桩联轴器
ⅱ‑1‑
3将转速和扭矩传递给传动轴
ⅰ‑1‑
9,传动轴
ⅰ‑1‑
9带动第一大腿
ⅰ‑1‑
6和第二大腿
ⅰ‑1‑
8顺时针旋转,经第一小腿
ⅰ‑1‑
2、第二小腿
ⅰ‑1‑
3使足部
ⅰ‑1‑
1在地面上做水平直线运动,完成一次支撑。
[0062]
2.摆动相动作:
[0063]
机械腿简化成对称式五连杆结构,l1、l2分别为主动;l3、l4为从动臂;点p为足端,根据l1、l2按逆时针转动时,使足端p离开地面。摆动相动作与支撑相动作类似,而电机的转动方向与支撑相的转动方向相反,使足部
ⅰ‑1‑
1在地面上完成跨越动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1