一种用于自动驾驶的液压转向系统装置的制作方法
1.本实用新型涉及一种自动驾驶车辆的转向系统装置,尤其涉及一种适用于重载车辆自动驾驶的液压转向系统装置。
背景技术:
2.传统的电动汽车转向过程:首先将方向盘的角度输出转换成控制系统可以接受的模拟信号,在执行转向前,定义方向盘的角度输出与模拟量之间的关系,然后对这个模拟信号的变化范围进行分析,经过计算即可得到不同的方向盘位置与转向时各个车轮转速的分配,内外侧车轮产生速度差异,实现转向,但是电动转向系统只对轻载车辆可行。
3.针对重载车辆自动驾驶的转向实际需求,设计了基于电液比例阀控制高压油进入转向油缸的左或右入口,推动油缸伺服杆向左或右移动,从而带动车轮实现左转或右转的液压转向系统装置。
技术实现要素:
4.本实用新型的目的在于针对现有技术的不足,提供一种用于重载车辆自动驾驶的液压转向系统装置。
5.本实用新型的目的是通过以下技术方案来实现的:一种用于重载车辆自动驾驶的液压转向系统装置,包括参数设定及测量分析单元、控制单元、执行单元;所述参数设定及测量分析单元包括电液比例放大器、方向角控制器、转角传感器,其中方向角控制器负责对转角给定值ag和由转角传感器反馈来的转角反馈值af进行比较,将比较结果作为控制信息传送给电液比例放大器,电液比例放大器据此向控制单元发送控制命令。所述控制单元包括a线圈、油箱、泵、b线圈、电液比例阀,其中电液比例阀控制高压油进入执行单元转向油缸的左或右入口,并可由线圈控制高压油的进入量。所述执行单元包括摆臂、 连杆(油缸伺服杆)、转向油缸,因高压油进入转向油缸的左或右入口不同,推动油缸伺服杆向左或向右移动,从而带动车轮实现左转或右转,控制进入转向油缸油量的多少可以调节车轮转角的大小。
6.本实用新型的有益效果是:本实用新型的液压转向系统装置,保证了重载车辆自动驾驶的转向控制实现。
附图说明
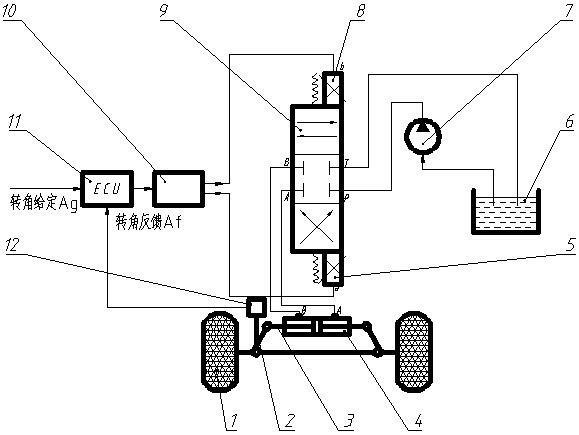
7.图1为重载车辆自动驾驶的液压转向系统装置结构图,1车轮、2摆臂、3连杆(油缸伺服杆)、4转向油缸、5 a线圈、6油箱、7泵、8 b线圈、9电液比例阀、10电液比例放大器、11方向角控制器、12转角传感器。
具体实施方式
8.下面结合附图和具体实施例对本实用新型作进一步详细说明。
9.本实用新型包括自动驾驶的液压转向系统装置,实现了重载车辆自动驾驶的转向控制。
10.如图1所示,重载车辆自动驾驶的液压转向系统装置,由参数设定及测量分析单元、控制单元、执行单元组成,其中参数设定及测量分析单元包括10电液比例放大器、11方向角控制器、12转角传感器;控制单元包括5 a线圈、6油箱、7泵、8 b线圈、9电液比例阀;执行单元包括2摆臂、 3连杆(油缸伺服杆)、4转向油缸,2摆臂与1车轮固定连接。
11.工作过程如下:参数设定及测量分析单元的11方向角控制器负责对转角给定值ag和由12转角传感器反馈来的转角反馈值af进行比较,将比较结果作为控制信息传送给10电液比例放大器,电液比例放大器据此向控制单元发送控制命令。控制单元的9电液比例阀根据所接收的控制命令控制高压油进入执行单元4转向油缸的左或右入口,并可由5 a线圈或8 b线圈控制高压油的进入量,因高压油进入4转向油缸的左或右入口不同,推动3连杆(油缸伺服杆)向左或向右移动,从而带动1车轮实现左转或右转,控制进入4转向油缸油量的多少可以调节车轮转角的大小。
12.进一步地,以左转为例详细说明车辆自动驾驶的液压转向系统装置的工作过程。当需要控制车轮左转时,参数设定及测量分析单元给定一角度值ag,11方向角控制器负责对转角给定值ag和由12转角传感器反馈来的转角反馈值af进行比较,将比较结果作为控制信息传送给10电液比例放大器,10电液比例放大器根据控制信息调节5 a线圈和8 b线圈,使9电液比例阀的a与p、b与t联通,此时7泵将6油箱里的油从a口泵入4转向油缸的右腔,从而推动3连杆(油缸伺服杆)向左移动,进一步推动2摇臂带动1车轮左转。
13.进一步地,车轮右转与左转控制方法类似。
14.进一步地,车轮转动角度的大小可通过10电液比例放大器根据控制信息调节5 a线圈和8 b线圈,控制9电液比例阀的a与p、b与t联通开口的大小,从而控制7泵将6油箱里的油泵入4转向油缸的油量多少,实现车轮转角大小的控制。
15.需要说明的是,该实用新型的特定实施方案已经进行了详细描述,对于本领域的技术人员来说,在不背离本发明的精神和范围的情况下对它进行的各种显而易见的改变都在本实用新型的保护范围之内。
技术特征:
1.一种用于自动驾驶的液压转向系统装置,其特征在于:包括参数设定及测量分析单元、控制单元、执行单元,其中参数设定及测量分析单元包括电液比例放大器、方向角控制器、转角传感器, 它们之间的连接关系是转角传感器的输出连接到方向角控制器,方向角控制器的输出连接到电液比例放大器,电液比例放大器的输出分别连接到控制单元中电液比例阀的a线圈和b线圈;控制单元包括a线圈、油箱、泵、b线圈、电液比例阀,它们之间的连接关系是电液比例阀的a口、b口通过油管与执行单元中转向油缸的a口、b口联通,p口通过油管与泵联通,t口通过油管与油箱联通;执行单元包括摆臂、 油缸伺服杆、转向油缸,它们之间的连接关系是摇臂一端与油缸伺服杆转动连接,另一端与车轮的转向节连接在一起,电液比例阀根据电液比例放大器传入的信息控制高压油进入转向油缸的左或右入口,推动油缸伺服杆向左或向右移动,带动车轮实现一定角度的左转或右转。2.根据权利要求1所述的自动驾驶的液压转向系统装置,主要用于重载车辆的自动驾驶转向系统。
技术总结
本实用新型提供一种用于自动驾驶的液压转向系统装置,包括参数设定及测量分析单元、控制单元、执行单元,其中参数设定及测量分析单元包括电液比例放大器、方向角控制器、转角传感器;控制单元包括a线圈、油箱、泵、b线圈、电液比例阀;执行单元包括摆臂、连杆(油缸伺服杆)、转向油缸。该装置是用于重载车辆的自动驾驶转向系统,主要控制方式是电液比例阀控制高压油进入转向油缸的左或右入口,推动油缸伺服杆向左或右移动,从而带动车轮实现左转或右转。转角大小控制通过方向角控制器对给定转角与转角传感器测量得到的转角反馈值进行比较,电液比例放大器调节线圈,控制电液比例阀开启大小,从而控制高压油进入的油量多少,实现转角大小的调节。角大小的调节。角大小的调节。
技术研发人员:鞠红
受保护的技术使用者:蓝蚁(济南)机器人科技有限责任公司
技术研发日:2020.11.27
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1