一种适用于海底采矿车的仿蟹足履带及其使用方法
1.本发明涉及深海采矿装备技术领域,尤其涉及一种适用于海底采矿车的仿蟹足履带及其使用方法。
背景技术:
2.深海海底是地球上尚未被开发的最大矿产资源地。迄今为止,已发现有经济价值的深海矿产资源主要有:含镍、铜、钴和锰的多金属结核,富含钴、镍、铜、锰的钴结壳和富含铜、铅、锌、金和银的海底多金属硫化物矿床。其中深海多金属结核储量就达数百亿吨,折合铜、镍、钴金属量20多亿吨,尤其是钴资源,是新能源材料不可或缺的重要原材料,这些资源是未来人类发展重要的物质基础,开发深海资源是未来的必然选择。
3.深海采矿车是深海多金属结核采矿系统的关键装备,深海采矿车经历了不同设计理念的演化,历经浮游式、拖曳式、阿基米德推进式、履带式,其中浮游式采矿车由于水力反流易产生反力导致行驶形态不稳;拖曳式采矿车拖斗路径难以控制无法保证稳定采集且成本极高;阿基米德式采矿车则因为牵引力低,越障困难等缺点被淘汰;而履带式采矿车所具备的承载力强、牵引力大、接地比压小、行驶与通过性能佳的优点使其在各领域得到了广泛的应用,其优点也适宜于深海软底质环境的作业要求。例如,公开号为cn106812529a的中国专利申请公开了一种基于旋涡水动力特性的集群式深海海底集矿装备,包括设备主体、多个海底适应性集矿器,及各海底适应性集矿器对应的输矿管;所述海底适应性集矿器具有履带行走机构,能够受控自主行走。
4.但是,由于深海海床表层土性质不均匀,稀软土层土体强度很低,传统的履带式采矿车在深海底行进过程中,履齿插入土层,土体提供的剪切力不足以支持采矿车前进,采矿车易发生沉陷或打滑,从而造成行车困难,降低采集效率。现有的研究多集中在对履齿结构的改进上。例如,申请人在先申请的公开号为cn111016560a的中国专利申请公开了包括安装于履带支架两侧的两条行走履带,所述行走履带上设有若干间隔布置的长履齿和短履齿,长履齿的高度大于短履齿的高度;当长履齿完全插入土中时,长履齿布置方向与行走履带行进方向呈锐角;其特征是,所述长齿板是呈一定弧度的弧板,长履齿中间部分相对于采矿车行进方向是向后凹陷的,在凸起面上中间位置竖向设置一定宽度的中间加固筋梁,凸起面两端竖向设有具有一定宽度的侧边加固筋梁,中间加固筋梁与侧边加固筋梁在形式和材料上一致;所述短履齿是呈具有一定高度和宽度的楔形体,楔形短履齿内部呈中空状态,并在楔形短履齿内部空腔中间设有起支撑和加固作用的短履齿筋梁,楔形短履齿的外表面沿长度方向设置有阶梯状的微型凸起。
5.公开号为cn207332879u的中国专利申请公开了可用于深海采矿车的打滑状态监控装置,其特征在于,包括控制装置、履带测速装置和测速地轮,所述履带测速装置安装于深海采矿车的履带驱动轮上且通过水下缆线和水密接连件与所述控制装置连接,所述测速地轮安装于深海采矿车的尾部并通过轴铰接以用于测量深海采矿车相对海底地面的行驶速度,且所述测速地轮通过水下缆线和水密接连件与所述控制装置连接。其仅提供了对打
滑状态的监控,没有提出具体解决打滑问题的方法。
6.发明人还曾提出如公开号cn112977658 a所述的一种分段式海底采矿车履带,包括两段侧边履带和一段中间履带,侧边履带和中间履带在垂直于前进方向上并排布置,中间履带位于两段侧边履带之间,侧边履带和中间履带能够独立运转;所述中间履带的履带板上固定设置有剪切履齿;所述侧边履带的履带板上设置有可调节履齿;所述可调节履齿包括可转动齿体、装配杆;可转动齿体与装配杆固定连接,装配杆穿设在所述侧边履带的履带板上的装配孔中;可转动齿体在装配杆的带动下能够转动,使得可调节履齿相对所述侧边履带的角度可调。
7.仿生学是生物学、数学和工程技术学互相渗透而结合成的一门新兴边缘科学,仿生学的任务是研究生物系统的优异能力及产生的原理,并把它模式化,然后应用这些原理去设计和制造新的技术设备。螃蟹是一种古老的生物,分布也十分广泛,它存在于世界上所有的海洋中,还有很多生活在淡水和陆地上。在生物不断进化的过程中,螃蟹这种多足动物能在不规则的复杂地形上行进,是它们在自然界的残酷竞争中存活下来的优势之一。现在已有多款螃蟹机器人研发成功。然而,尚未见有将其用于海底采矿车履带的研究。本技术试图针对现有技术中存在的履带海底采矿车易沉陷、打滑等问题,与仿生学相结合,从改进履带结构出发予以解决。
技术实现要素:
8.本发明的目的是提供一种适用于海底采矿车的仿蟹足履带及其使用方法,能够解决履带式海底采矿车易发生沉陷、打滑的问题。
9.为解决现有技术存在的问题,本发明提供一种适用于海底采矿车的仿蟹足履带,包括内置履带、外置履带、连接履带,所述内置履带设置在连接履带内侧,所述外置履带设置在连接履带外侧,所述内置履带通过连接履带与外置履带固定连接;其特征在于,所述外置履带上设置有基础履齿和仿蟹足履齿,所述基础履齿和仿蟹足履齿间隔设置。所述仿蟹足履齿包括齿体、仿生蟹足,仿生蟹足设置齿体外端,所述仿生蟹足与齿体通过第一转动轴连接。
10.优选的,所述仿生蟹足包括固定装置、腕节、前节、指节,所述固定装置908与第一转动轴可转动连接,所述腕节通过第二转动轴与所述固定装置可转动连接,所述前节通过第三转动轴与所述腕节可转动连接,所述指节通过第四转动轴与所述前节可转动连接。
11.优选的,所述齿体上还设置有收纳槽,用于容纳收起时的所述仿生蟹足。
12.优选的,所述仿生蟹足设置有仿生蟹毛,所述仿生蟹毛能够减少或避免海底生物的附着,以保证在长时间的工作环境中,所述仿生蟹足仍能正常收纳进所述收纳槽。
13.优选的,每隔1
‑
5个基础履齿之间设置有两个对称设置的所述仿蟹足履齿。
14.优选的,所述仿蟹足履齿呈收起状态时,高度等于或略低于所述基础履齿的高度,不影响海底采矿车在正常平稳路况上的行驶;所述仿蟹足履齿呈展开状态时,高度等于或高于基础履齿的高度,能保证整个海底采矿车的平稳,同时更好地应对恶劣路况。
15.为解决现有技术存在的问题,本发明还提供一种适用于海底采矿车的仿蟹足履带的使用方法,包括:a、将所述仿蟹足履带装配在海底采矿车上;
b、在驱动齿轮的带动下,所述内置履带运转,同时通过连接履带带动外置履带运转,海底采矿车开始前进;c、当海底采矿车在平稳路况上行驶时,仿蟹足履齿处于收起状态,即仿生蟹足存放于所述收纳槽中;d、当海底采矿车在恶劣路况上行驶时,通过控制系统使仿生蟹足展开,上述展开过程是在行走过程中循序渐进地完成,顺序为前后侧和上侧的仿生蟹足先旋转至展开位置,随着前进运动,下侧的仿蟹足履齿运动至上侧时,仿生蟹足逐一展开,直至所有的仿蟹足履齿均进入展开状态;当离开恶劣路况后要回收时,与上述操作相反,通过控制系统使仿生蟹足逐一收回到收纳槽中,使整个履带回到在正常路况上的行驶状态。
16.优选的,根据路况控制腕节、前节、指节之间呈一定夹角。
17.本发明的特点和有益效果是:本发明所提供的适用于深海采矿车安全行进的仿蟹足履带能提高普通履带的承载能力,提升海底采矿车整体性能。使履带适用于不同的路况,当面对复杂恶劣路况时,仿蟹足履齿在运动中可减少入土和出土能耗,提高运动效率,起到节能减耗的效果。并能够提高土体对履带的附着力,有利于采矿车在发生沉陷或打滑时脱离险境,保证采矿车的正常行驶。
附图说明
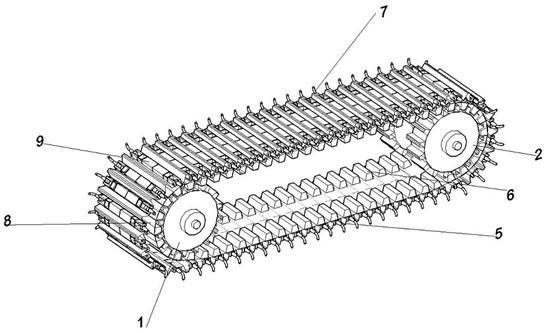
18.图1为本发明的整体结构示意图;图2为内置履带结构示意图;图3为本发明的侧视结构示意图;图4为仿蟹足履齿回收状态示意图;图5为仿蟹足履齿展开状态示意图;图6为仿蟹足履齿侧视结构示意图。
19.附图标记列表:1、第一前驱动齿轮;2、第一后驱动齿轮;3、第二前驱动齿轮;4、第二后驱动齿轮;5、第一内置履带;6、第二内置履带;7、外置履带;8、连接履带;9、仿蟹足履齿;901、齿体;902、收纳槽;903、第一转动轴;904、仿生蟹足;905、腕节;906、前节;907、指节;908、固定装置;909、第二转动轴;910、第三转动轴;911、第四转动轴;912、仿生蟹毛。
具体实施方式
20.为使本发明能更有效地达到既定目的和作用,下面结合附图对本发明的结构、特征和具体实施方式作进一步的阐述。
21.具体实施例1如图1
‑
6所示,一种适用于海底采矿车的仿蟹足履带,包括内置履带、外置履带7、连接履带8,所述内置履带包括第一内置履带5、第二内置履带6,所述第一内置履带5、第二内置履带6并列设置,所述第一内置履带5由第一前驱动齿轮1和第一后驱动齿轮2驱动运行,所述第二内置履带6由第二前驱动齿轮3和第二后驱动齿轮4驱动运行,所述第一内置履带5、第二内置履带6并排设置,所述第一内置履带5、第二内置履带6设置在连接履带8内侧,所述外置履带7设置在连接履带8外侧,所述第一内置履带5、第二内置履带6通过连接履带8
与外置履带7固定连接;所述外置履带7上设置有基础履齿和仿蟹足履齿9,所述基础履齿和仿蟹足履齿9间隔设置。
22.所述仿蟹足履齿9包括齿体901、仿生蟹足904,仿生蟹足904设置齿体901外端,所述仿生蟹足904与齿体901通过第一转动轴903连接。所述仿生蟹足包括固定装置908、腕节905、前节906、指节907,所述固定装置908与第一转动轴903可转动连接,所述腕节905通过第二转动轴909与所述固定装置908可转动连接,所述前节906通过第三转动轴910与所述腕节905可转动连接,所述指节907通过第四转动轴911与所述前节906可转动连接。所述齿体901上还设置有收纳槽902,用于容纳收起时的所述仿生蟹足904。所述仿生蟹足904设置有仿生蟹毛912,所述仿生蟹毛912能够减少或避免海底生物的附着,以保证在长时间的工作环境中,所述仿生蟹足904仍能正常收纳进所述收纳槽902。
23.两个基础履齿之间设置有两个对称设置的所述仿蟹足履齿9 ,所述仿蟹足履齿9呈收起状态时,高度等于或略低于所述基础履齿的高度,不影响海底采矿车在正常平稳路况上的行驶;所述仿蟹足履齿呈展开状态时,高度等于或高于基础履齿的高度,能保证整个海底采矿车的平稳,同时更好地应对恶劣路况。
24.使用时,首先将所述适用于海底采矿车的仿蟹足履带装配在海底采矿车上。
25.在第一前驱动齿轮1、第一后驱动齿轮2、第二前驱动齿轮3、第二后驱动齿轮4的带动下,所述第一内置履带5、第二内置履带6同步运转,同时通过连接履带8带动外置履带7运转,海底采矿车开始前进。
26.当海底采矿车在平稳路况上行驶时,仿蟹足履齿9处于收起状态,即仿生蟹足904存放于收纳槽902中。
27.采矿车在恶劣路况上行驶时,如松软易下沉的土体,通过控制系统使仿生蟹足904展开,并根据路况控制腕节905、前节906、指节907之间呈一定夹角,例如150度
‑
170度。因为履带下部空间有限,上述展开过程是在行走过程中循序渐进地完成。顺序为前后侧和上侧的仿生蟹足904先旋转至展开位置,随着前进运动,下侧的仿蟹足履齿运动至上侧时,仿生蟹足904逐一展开。直至所有的仿蟹足履齿9均进入展开状态。仿生蟹足904的插入和移动可以提高整个履带的承载能力,履带的下沉深度较正常行驶时会减少,同时也增加了海底对履带的摩擦力和支撑力,使采矿车能更好地在该路况下行驶。当离开恶劣路况后要回收时,与上述操作相反,通过控制系统使仿生蟹足904逐一收回到收纳槽902中,使整个履带回到在正常路况上的行驶状态。
28.具体实施例2与具体实施例1不同的是,所述内置履带的数量也可以是1条或多条,可以与驱动齿轮的设置方式等相适应。也可以在每隔多个基础履齿,例如2
‑
5个,设置有一对仿蟹足履齿9。
29.需要说明的是,本发明是针对海底采矿车履带本身结构的改进,海底采矿车其余的部分能够实现履带的功能即可,例如,带动内置履带运行的动力系统、控制系统,控制仿生蟹足904展开、收回的调节装置、控制系统等,均可以通过本领域的现有技术实现,在此不一一详述。
30.本发明所提供的适用于深海采矿车安全行进的仿蟹足履带能提高普通履带的承载能力,提升海底采矿车整体性能。使履带适用于不同的路况,当面对复杂恶劣路况时,仿
蟹足履齿在运动中可减少入土和出土能耗,提高运动效率,起到节能减耗的效果。并能够提高土体对履带的附着力,有利于采矿车在发生沉陷或打滑时脱离险境,保证采矿车的正常行驶。
31.以上参考了优选实施例对本发明进行了描述,但本发明的保护范围并不限制于此,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“前”、“后”、“第一”、“第二”等用语,亦仅为了便于叙述,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1