一种智能小车转向系统的制作方法
1.本发明涉及机器人技术领域,特别涉及一种智能小车转向系统。
背景技术:
2.智能小车正逐步应用于教育、工业、生活等各个领域,例如园区巡逻、最后一公里快递配送、自动送餐、智能车竞赛等场景。智能小车完成上述工作对转向性能有着极高的要求。研发一种结构简单、通用性强、成本低的智能小车转向系统对各种智能小车的广泛应用具有较大价值。
技术实现要素:
3.本申请的目的是提供一种智能小车转向系统,所述智能小车转向系统结构简单,通用性强,可广泛应用于多种智能小车及机器人。
4.为了实现上述目的,本申请提供如下技术方案:
5.一种智能小车转向系统,包括:驱动系统和转向机构。
6.所述驱动系统包括电机支架、转向电机、电机法兰盘。
7.所述转向机构包括摇臂、短拉杆、长拉杆、羊角、联轴器、羊角支架,所述羊角、联轴器、羊角支架分别为2个并分别布置在所述长拉杆的两端。所述短拉杆包括短拉杆球头1、短拉杆连杆、短拉杆球头2。所述长拉杆包括长拉杆球头1、长拉杆连杆、长拉杆球头2。所述羊角支架包括羊角支架支撑板、羊角支架支撑柱。
8.所述电机支架通过螺栓固定在小车底盘上,所述转向电机通过螺栓固定在所述电机支架上,所述电机法兰盘通过花键固定在所述转向电机的输出轴上。
9.所述摇臂一端通过螺栓固定在所述电机法兰盘上,另一端通过螺栓与所述短拉杆铰接。所述短拉杆的另一端通过螺栓与所述长拉杆铰接。所述长拉杆的两端通过螺栓分别铰接有一个所述羊角。所述联轴器一端通过螺钉与所述羊角连接,另一端用于连接轮胎。所述羊角分别通过螺钉铰接在所述羊角支架支撑板及小车底盘之间。所述羊角支架支撑柱内部设置有孔螺纹,所述羊角支架支撑板通过羊角支架支撑柱固定在小车底盘上。
10.本申请的有益效果是,设计了一种结构简单、通用性强的智能小车转向系统。所述智能小车转向系统通过所述转向机构可以有效地把转向电机的转动转化为轮胎的偏转,从而驱动机器人转向。
附图说明
11.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他附图,都属于本申请保护的范围。
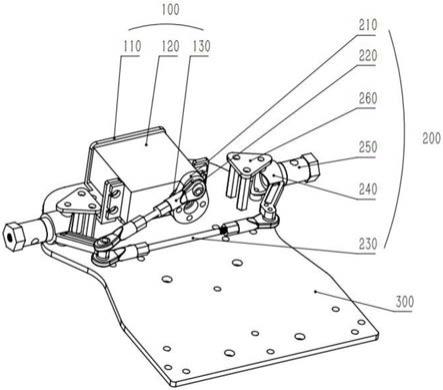
12.图1为本申请实施例提供的智能小车转向系统立体结构示意图;
13.图2为本申请实施例提供的智能小车转向系统俯视结构示意图;
14.图3为本申请实施例提供的电机法兰盘结构示意图;
15.图4为本申请实施例提供的短拉杆结构示意图;
16.图5为本申请实施例提供的长拉杆结构示意图;
17.图6为本申请实施例提供的羊角支架结构示意图。
18.附图标注说明:
19.100
‑
驱动系统,110
‑
电机支架,120
‑
转向电机,130
‑
电机法兰盘;
20.200
‑
转向机构,210
‑
摇臂,220
‑
短拉杆,230
‑
长拉杆,240
‑
羊角,250
‑
联轴器,260
‑
羊角支架,221
‑
短拉杆球头1,222
‑
短拉杆连杆,223
‑
短拉杆球头2,231
‑
长拉杆球头1,232
‑
长拉杆连杆,233
‑
长拉杆球头2,261
‑
羊角支架支撑板,262
‑
羊角支架支撑柱;
21.300
‑
小车底盘。
具体实施方式
22.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请的一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为本申请及其应用或使用的任何限制。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
23.如图1至图3所示,本申请提供的智能小车转向系统,包括:驱动系统(100)和转向机构(200)。所述驱动系统(100)包括电机支架(110)、转向电机(120)、电机法兰盘(130)。所述转向机构(200)包括摇臂(210)、短拉杆(220)、长拉杆(230)、羊角(240)、联轴器(250)、羊角支架(260)。所述羊角(240)、联轴器(250)、羊角支架(260)分别为2个,并分别布置在所述长拉杆(230)的两端。
24.如图4至图6所示,所述短拉杆(220)包括短拉杆球头1(221)、短拉杆连杆(222),短拉杆球头2(223)。所述长拉杆(230)包括长拉杆球头1(231),长拉杆连杆(232),长拉杆球头2(233)。所述羊角支架(260)包括羊角支架支撑板(261),羊角支架支撑柱(262)。所述羊角支架支撑柱(262)可以设置为多个,在本实施例中每个羊角支架(260)设置有2个羊角支架支撑柱(262)。
25.进一步地,所述电机支架(110)通过螺栓固定在小车底盘(300)上,所述转向电机(120)通过螺栓固定在所述电机支架(110)上,所述电机法兰盘(130)的内孔设置有花键并与所述转向电机(120)输出轴配合,用于输出所述转向电机(120)的转动力矩。
26.进一步地,所述摇臂(210)一端通过螺栓固定在所述电机法兰盘(130)上,另一端通过螺栓与所述短拉杆(220)铰接。所述短拉杆(220)的另一端通过螺栓与所述长拉杆(230)铰接。所述长拉杆(230)的两端通过螺栓分别铰接有一个所述羊角(240)。所述联轴器(250)一端通过螺钉与所述羊角(240)连接,另一端用于连接轮胎(图未示)。所述羊角(240)分别通过螺钉铰接在所述羊角支架支撑板(261)及小车底盘(300)之间。所述羊角支架支撑柱(262)内部设置有孔螺纹,所述羊角支架支撑柱(262)一端通过螺钉固定在小车底盘(300)上,另一端通过螺钉固定所述羊角支架支撑板(261)。
27.所述转向电机(120)输出的转动力矩通过电机法兰盘(130)、摇臂(210)传递给短
拉杆(220),再经过长拉杆(230)传递给铰接在羊角支架(260)上的羊角(240),使羊角(240)和与它相连的联轴器(250)发生偏转,从而带动与联轴器(250)相连的轮胎(图未示)发生偏转。
28.本实施例中提供的智能小车转向系统结构简单、通用性强,可以广泛用于多种小车和机器人。
技术特征:
1.一种智能小车转向系统,其特征在于,所述智能小车转向系统包括:驱动系统,包括电机支架、转向电机、电机法兰盘;转向机构,包括摇臂、短拉杆、长拉杆、羊角、联轴器、羊角支架,所述羊角、联轴器、羊角支架分别为2个并分别布置在所述长拉杆的两端;所述短拉杆包括短拉杆球头1、短拉杆连杆、短拉杆球头2;所述长拉杆包括长拉杆球头1、长拉杆连杆、长拉杆球头2;所述羊角支架包括羊角支架支撑板、羊角支架支撑柱。2.根据权利要求1所述的智能小车转向系统,其特征在于,所述电机支架通过螺栓固定在小车底盘上,所述转向电机通过螺栓固定在所述电机支架上,所述电机法兰盘通过花键固定在所述转向电机输出轴上。3.根据权利要求1所述的智能小车转向系统,其特征在于,所述摇臂一端通过螺栓固定在所述电机法兰盘上,另一端通过螺栓与所述短拉杆铰接;所述短拉杆的另一端通过螺栓与所述长拉杆铰接;所述长拉杆的两端通过螺栓分别铰接有一个所述羊角;所述联轴器一端通过螺钉固定在所述羊角上,另一端用于连接轮胎;所述羊角支架支撑柱内部设置有孔螺纹,所述羊角支架支撑板通过羊角支架支撑柱固定在小车底盘上;所述羊角通过螺钉铰接在所述羊角支架支撑板及小车底盘之间。
技术总结
本申请公开了一种智能小车转向系统,包括驱动系统、转向机构。所述驱动系统包括电机支架、转向电机、电机法兰盘,所述电机支架固定在小车底盘上,所述转向电机固定在所述电机支架上,所述电机法兰盘固定在所述转向电机输出轴上。所述转向机构包括摇臂、短拉杆、长拉杆、羊角、联轴器、羊角支架。所述摇臂一端固定在所述电机法兰盘上,另一端与所述短拉杆铰接。所述短拉杆的另一端与所述长拉杆铰接。所述长拉杆的两端分别铰接有一个所述羊角。所述羊角的另一端分别固定有一个所述联轴器,所述联轴器另一端用于连接轮胎。所述羊角通过所述羊角支架铰接在小车底盘上。所述智能小车转向系统结构简单,通用性强,可以广泛用于多种小车和机器人。人。人。
技术研发人员:何育军
受保护的技术使用者:武汉酷点机器人科技有限公司
技术研发日:2021.02.16
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1