一种模块化履带式移动平台及其转向系统的制作方法
1.本实用新型属于移动运输设备技术领域,具体涉及一种模块化履带式移动平台及其转向系统。
背景技术:
2.履带底盘因着地压强小、通过性好、越野能力强的特点,在工程等领域得到广泛应用,但是,根据履带车辆转向分析,履带与地面接触长度越长越不利于履带底盘的转向,履带接地长度与轨距之比大于1.95的履带底盘不具备转向的基本条件,因此,传统履带底盘的长度与轨距之比一般为1.2~1.35,不适用于长宽比较大的移动平台。
3.而且,履带底盘转向阻力矩不仅与履带底盘自重、履带横向滑移摩擦系数成正比,还与履带接地长度正比,导致履带底盘发动机功率往往取决于其转向能力,不适用于大型但轻载的移动平台。
技术实现要素:
4.本实用新型的目的是解决传统履带底盘因转向难度大,无法应用于长宽比较大或大型移动平台的技术问题,提供一种模块化履带式移动平台及其转向系统。
5.为解决上述技术问题,本实用新型采用的技术方案是:
6.一种模块化履带式移动平台及其转向系统,包括移动平台、平台控制系统、若干个履带底盘模块和若干个转向装置,所述履带底盘模块的结构与传统履带车的结构相同,所述若干个履带底盘模块在地面上排列,所述若干个转向装置设置在若干个履带底盘模块的顶面车架上,所述移动平台设置在若干个转向装置顶部,所述平台控制系统设置在移动平台的底面中部,所述平台控制系统分别与若干个履带底盘模块的控制单元和若干个转向装置电性连接。
7.进一步的,所述移动平台采用一个整体平台或者由若干个平台组合而成的平台中的任意一种。
8.进一步的,所述若干个履带底盘模块在地面上采用2
×
1式、2
×
2式或3轮式中的任意一种方式布置。
9.进一步的,所述转向装置包括连接轴、两个轴承、角度传感器和锁止机构,所述轴承设置在连接轴的两端且上端的轴承设置在移动平台底面的轴承座内,下端的轴承设置在履带底盘模块顶面车架的轴承座内,所述角度传感器设置在连接轴上,所述锁止机构设置在轴承上。
10.进一步的,所述锁止机构是制动器或者销轴中的任意一种。
11.进一步的,在所述履带底盘模块的转向单元内也设有角度传感器。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型移动平台由模块化的履带底盘模块组合而成,具有通用、可组合的特点,可以通过将履带底盘模块组合成各样的移动平台,来满足各种各样的移动运输需求;
14.2、本实用新型移动平台不仅具有履带底盘的优势,同时也解决了传统履带底盘转向难度大的问题,扩展了履带底盘作为移动平台的应用。
附图说明
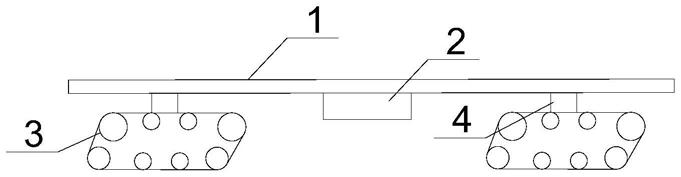
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中履带底盘模块的结构示意图;
17.图3为本实用新型中履带底盘模块的俯视结构示意图;
18.图4为本实用新型的3轮式履带底盘模块结构示意图;
19.图5为本实用新型的2
×
1式履带底盘模块结构示意图;
20.图6为本实用新型的2
×
2式履带底盘模块结构示意图;
21.图7为本实用新型2
×
2式履带底盘模块移动平台的前轮转向示意图;
22.图8为本实用新型2
×
2式履带底盘模块移动平台的全轮转向示意图;
23.图9为本实用新型2
×
2式履带底盘模块移动平台的蟹行转向示意图;
24.图10为本实用新型的转向流程示意图;
25.图中:1
‑
移动平台、2
‑
平台控制系统、3
‑
履带底盘模块、4
‑
转向装置;
具体实施方式
26.下面结合实施例及其附图说明本实用新型的详细结构,但本实用新型不局限于下述实施例,在本实用新型的设计创意的框架内,各种组合实施,或单项实施均在有效保护范围之内。
27.实施例1:
28.一种模块化履带式移动平台及其转向系统,包括移动平台1、平台控制系统3、4个履带底盘模块2和4个转向装置4,所述履带底盘模块2的结构与传统履带车的结构相同,所述4个履带底盘模块2在地面上采用2
×
1式方式排列,所述4个转向装置4设置在4个履带底盘模块2的顶面车架上,所述移动平台1采用一个整体平台,设置在4个转向装置4顶部,所述平台控制系统3设置在移动平台1的底面中部,所述平台控制系统3分别与4个履带底盘模块2的控制单元和4个转向装置4电性连接。
29.所述转向装置4包括连接轴、两个轴承、角度传感器和锁止机构,所述轴承设置在连接轴的两端且上端的轴承设置在移动平台1底面的轴承座内,下端的轴承设置在履带底盘模块2顶面车架的轴承座内,所述角度传感器设置在连接轴上,所述锁止机构采用制动器,设置在轴承上。
30.实施例2:
31.本实施例中,采用3个履带底盘模块2按照3轮式方式排列,3个转向装置设置在3个履带底盘模块2的顶面车架上,3个移动平台1设置在3个转向装置4的顶部且组成一个大的移动平台1,所述锁止机构采用销轴,设置在轴承上,其他结构与实施例1相同。
32.实施例3:
33.本实施例中,采用2个履带底盘模块2按照2
×
1式方式排列,2个转向装置设置在2个履带底盘模块2的顶面车架上,2个移动平台1设置在2个转向装置4的顶部且组成一个大的移动平台1,所述锁止机构采用制动器,设置在轴承上,其他结构与实施例1相同。
34.本实用新型工作原理如下:
35.如图10所示,平台控制系统3从操作者接收转向模式指令,包括移动平台的转向模式,及平台中单个履带底盘模块2的转角,并通过平台控制系统3计算得到各个履带底盘模块2需要转向的目标转角,并将目标转角发送至每个履带底盘模块2的控制单元,每个履带底盘模块2通过角度传感器监测实际转角,其控制单元将目标转角与实际转角的差值进行分析比较,并控制每个履带底盘模块2中转向单元的旋转方向和速度实现原地转向,直至目标转角及实际转角的差值达到可接受范围,然后通过每个履带底盘模块2的电磁制动器进行制动锁止,当所有履带底盘模块2的转角均符合目标转角时,平台控制系统3开始控制履带底盘模块2的驱动电机驱动行驶。
36.其中,在行驶过程中,控制系统监测各履带底盘模块的转角,当某个履带底盘模块2不符合其转角关系时,平台控制系统3控制履带底盘模块2履带两侧的驱动电机进行角度纠正,使各履带底盘模块2的转角关系符合平台状态。
技术特征:
1.一种模块化履带式移动平台及其转向系统,其特征在于,包括移动平台(1)、平台控制系统(3)、若干个履带底盘模块(2)和若干个转向装置(4),所述履带底盘模块(2)的结构与传统履带车的结构相同,所述若干个履带底盘模块(2)在地面上排列,所述若干个转向装置(4)设置在若干个履带底盘模块(2)的顶面车架上,所述移动平台(1)设置在若干个转向装置(4)顶部,所述平台控制系统(3)设置在移动平台(1)的底面中部,所述平台控制系统(3)分别与若干个履带底盘模块(2)的控制单元和若干个转向装置(4)电性连接。2.根据权利要求1所述的一种模块化履带式移动平台及其转向系统,其特征在于,所述移动平台(1)采用一个整体平台或者由若干个平台组合而成的平台中的任意一种。3.根据权利要求1所述的一种模块化履带式移动平台及其转向系统,其特征在于,所述若干个履带底盘模块(2)在地面上采用2
×
1式、2
×
2式或3轮式中的任意一种方式布置。4.根据权利要求1所述的一种模块化履带式移动平台及其转向系统,其特征在于,所述转向装置(4)包括连接轴、两个轴承、角度传感器和锁止机构,所述轴承设置在连接轴的两端且上端的轴承设置在移动平台(1)底面的轴承座内,下端的轴承设置在履带底盘模块(2)顶面车架的轴承座内,所述角度传感器设置在连接轴上,所述锁止机构设置在轴承上。5.根据权利要求4所述的一种模块化履带式移动平台及其转向系统,其特征在于,所述锁止机构是制动器或者销轴中的任意一种。6.根据权利要求1所述的一种模块化履带式移动平台及其转向系统,其特征在于,在所述履带底盘模块(2)的转向单元内也设有角度传感器。
技术总结
本实用新型属于移动运输设备技术领域,具体涉及一种模块化履带式移动平台及其转向系统。目的是解决传统履带底盘因转向难度大,无法应用于长宽比较大或大型移动平台的技术问题。技术方案为:它包括移动平台、平台控制系统、若干个履带底盘模块和若干个转向装置,履带底盘模块的结构与传统履带车的结构相同,履带底盘模块在地面上排列,转向装置设置在履带底盘模块的顶面车架上,移动平台设置在转向装置顶部,平台控制系统设置在移动平台的底面中部,平台控制系统分别与履带底盘模块的控制单元和转向装置电性连接。本实用新型移动平台不仅具有履带底盘的优势,同时也解决了传统履带底盘转向难度大的问题,扩展了履带底盘作为移动平台的应用。动平台的应用。动平台的应用。
技术研发人员:梁培根 张奇 张喆 孙业钧
受保护的技术使用者:山西赛坦科技有限公司
技术研发日:2021.05.07
技术公布日:2021/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1