一种冰雪娱乐双足机器人
1.本实用新型涉及机器人技术领域,尤其涉及一种冰雪娱乐双足机器人。
背景技术:
2.随着我国人民生活水平的提高,旅游成为很多人生活中必不可少的一部分,对于东北三省而言,冰雪旅游是一种具有极大潜力的经济产业。鉴于现有冰雪娱乐项目仍然具有很大的传统性与单一性,存在大量空白市场,我们设计出一款以多连杆仿人体下肢机构作为行走机构并搭载雪橇的全新冰雪娱乐双足机器人。该机器人能够完成拉人,拉车,拉爬犁以及其他的冰雪娱乐活动,可以在一定程度上代替人力或动物。
3.目前大多数的双足机器人机构复杂,制作成本较高,制作周期也较长,这对于使用者来说经济负担大,相比之下,该机器人具有很高的性价比。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的不足,本发明提供一种功能多样、结构巧妙、控制简单、稳定性强、成本低的冰雪娱乐双足机器人,在冰雪场地上行走,完成冰雪娱乐活动。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.设计一种冰雪娱乐双足机器人,包括转轴、扇形齿、基体、电机、圆盘、摇杆、第一连杆、第二连杆、第三连杆、第四连杆、三角架和地脚;
7.所述电机包括两个直流减速电机,两个所述直流减速电机分别安装在所述基体的上方和下方;所述圆盘与安装在所述基体下方的直流减速电机的输出轴相连接;所述扇形齿带齿部分与安装在基体上方的所述直流减速电机输出轴齿轮相啮合,所述扇形齿的顶部与所述转轴相连;所述摇杆的一端与所述基体相铰接,所述摇杆的另一端与所述三角架的一个角点相铰接;所述第一连杆的一端与所述圆盘的偏心位置相转动连接,所述第一连杆的另一端与所述摇杆的中部相铰接;所述第二连杆的一端与所述第一连杆的中部相铰接,所述第二连杆的另一端与三角架的一个角点相铰接;所述第三连杆的一端与所述摇杆的中部相铰接,所述第三连杆的另一端与所述第四连杆的一端相铰接;所述第四连杆的一端与所述第三连杆相铰接,所述第四连杆的另一端与所述三角架的一个角点相铰接;所述地脚与所述第四连杆、所述三角架铰接于同一点。
8.优选的,所述地脚底部设有防滑条纹。
9.优选的,所述基体上可拆卸的连接有雪橇。
10.本实用新型提出的一种冰雪娱乐双足机器人,有益效果提供一种功能多样、结构巧妙、控制简单、稳定性强、成本低的冰雪娱乐双足机器人,该机器人利用两个电机驱动行走机构和转向机构,在雪橇的作用下在冰雪场地上行走,完成冰雪娱乐活动,为冰雪旅游产业的发展增添新动力。
附图说明
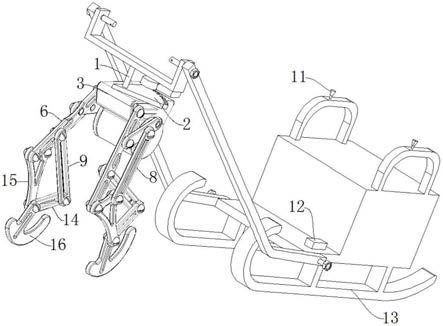
11.图1为本实用新型提出的一种冰雪娱乐双足机器人与雪橇的连接结构示意图。
12.图2为本实用新型提出的一种冰雪娱乐双足机器人与雪橇连接后的主视图。
13.图3为本实用新型提出的一种冰雪娱乐双足机器人的结构示意图。
14.图4为本实用新型提出的一种冰雪娱乐双足机器人的主视图。
15.图中:转轴1、扇形齿2、基体3、圆盘5、摇杆6、第一连杆7、第二连杆8、第三连杆9、轴承10、开关11、电池12、雪橇13、第四连杆14、三角架15、地脚16。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
17.参照图1
‑
4,一种冰雪娱乐双足机器人,包括转轴1、扇形齿2、基体3、圆盘5、摇杆6、第一连杆7、第二连杆8、第三连杆9、轴承10、开关11、电池12、雪橇13、第四连杆14、三角架15和地脚16。
18.两个直流减速电机44分别安装在基体3的上方和下方;圆盘5与安装在基体3下方的直流减速电机4的输出轴相连接;扇形齿2带齿部分与安装在基体3上方的直流减速电机4输出轴齿轮相啮合,扇形齿2的顶部与转轴1相连;摇杆6的一端与基体3相铰接,另一端与三角架15的一个角点相铰接;第一连杆7的一端与圆盘5的偏心位置相转动连接,另一端与摇杆6的中部相铰接;第二连杆8的一端与第一连杆7的中部相铰接,另一端与三角架15的一个角点相铰接;第三连杆9的一端与摇杆6的中部相铰接,另一端与第四连杆14的一端相铰接;第四连杆14的一端与第三连杆9相铰接,另一端与三角架15的一个角点相铰接;地脚16与第四连杆14、三角架15铰接于同一点;雪橇13与双足机器人的基体3相连接;
19.基体3、直流减速电机4、圆盘5、摇杆6、第一连杆7共同构成曲柄摇杆6机构,在直流减速电机4的驱动下,该曲柄摇杆6机构与其他的四连杆机构共同运动从而使得整个机器人前后运动;
20.基体3、直流减速电机4、扇形齿2、转轴1共同构成转向机构,在直流减速电机4的驱动下,与直流减速电机4输出轴上的齿轮啮合的扇形齿2在一定范围内转动,通过转轴1使得机器人变向运动;
21.雪橇13既能够保证机器人平稳地完成行走,又能够作为冰雪娱乐项目的器材搭载游客完成娱乐活动;该冰雪娱乐双足机器人行走机构在结构上与人体下肢非常相似,包括髋关节、大腿、膝关节、小腿,行走时仿生效果非常好。
22.整个机器人只采用两个直流减速电机4,控制其中一个直流减速电机4的转动来调整双足机器人的前后运动,控制另一个直流减速电机4的转动实现变向运动。雪橇13既能够保证机器人平稳地完成行走,又能够作为冰雪娱乐项目的器材搭载游客完成娱乐活动。冰雪娱乐双足机器人通过电池12供电,通电后可将开关11拨到前进、后退挡,安装在基体3下方的电机4驱动圆盘5做圆周运动,这使得铰接在圆盘5上的第一连杆7的铰接点也做圆周运动,第一连杆7将力传递给摇杆6和第二连杆8,摇杆6往复摇摆,使其它杆机构一起按照一定的轨迹运动。行走机构左边地脚16向前抬起和右边地脚16向后抬起,左边的地脚16在电机4
的驱动下向后抬起和右边地脚16在电机的驱动下向前抬起,并且对边连杆始终保持平行,以此交替进行持续的前后运动,当地脚16着地运动以后,雪橇13也跟着一起前后运动,从而实现整个冰雪娱乐双足机器人的前后运动。将开关11拨到左转挡,安装在基体3上方的电机4通过齿轮啮合的方式驱动扇形齿2逆时针转动,再通过与扇形齿2一端相连接的转轴1实现冰雪娱乐双足机器人向左运动。将开关11拨到右转挡,安装在基体3上方的电机4通过齿轮啮合的方式驱动扇形齿2顺时针转动,再通过与扇形齿2一端相连接的转轴1实现冰雪娱乐双足机器人向右运动。
23.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种冰雪娱乐双足机器人,其特征在于,包括转轴、扇形齿、基体、电机、圆盘、摇杆、第一连杆、第二连杆、第三连杆、第四连杆、三角架和地脚;所述电机包括两个直流减速电机,两个所述直流减速电机分别安装在所述基体的上方和下方;所述圆盘与安装在所述基体下方的直流减速电机的输出轴相连接;所述扇形齿带齿部分与安装在基体上方的所述直流减速电机输出轴齿轮相啮合,所述扇形齿的顶部与所述转轴相连;所述摇杆的一端与所述基体相铰接,所述摇杆的另一端与所述三角架的一个角点相铰接;所述第一连杆的一端与所述圆盘的偏心位置相转动连接,所述第一连杆的另一端与所述摇杆的中部相铰接;所述第二连杆的一端与所述第一连杆的中部相铰接,所述第二连杆的另一端与三角架的一个角点相铰接;所述第三连杆的一端与所述摇杆的中部相铰接,所述第三连杆的另一端与所述第四连杆的一端相铰接;所述第四连杆的一端与所述第三连杆相铰接,所述第四连杆的另一端与所述三角架的一个角点相铰接;所述地脚与所述第四连杆、所述三角架铰接于同一点。2.根据权利要求1所述的一种冰雪娱乐双足机器人,其特征在于,所述地脚底部设有防滑条纹。3.根据权利要求1所述的一种冰雪娱乐双足机器人,其特征在于,所述基体上可拆卸的连接有雪橇。
技术总结
本实用新型涉及机器人技术领域,尤其是一种冰雪娱乐双足机器人,包括转轴、扇形齿、基体、电机、圆盘、摇杆、第一连杆、第二连杆、第三连杆、第四连杆、三角架和地脚;所述电机包括两个直流减速电机,两个所述直流减速电机分别安装在所述基体的上方和下方;所述圆盘与安装在所述基体下方的直流减速电机的输出轴相连接;所述扇形齿带齿部分与安装在基体上方的所述直流减速电机输出轴齿轮相啮合,所述扇形齿的顶部与所述转轴相连;本机器人功能多样、结构巧妙、控制简单、稳定性强、成本低的冰雪娱乐双足机器人,能够在冰雪场地上行走,完成冰雪娱乐活动,为冰雪旅游产业的发展增添新动力。为冰雪旅游产业的发展增添新动力。为冰雪旅游产业的发展增添新动力。
技术研发人员:朱江平 金向阳 饶文强 王天棋 高丹妮 杨子鑫 张瀚予
受保护的技术使用者:哈尔滨商业大学
技术研发日:2021.05.13
技术公布日:2021/11/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1