一种矿用救援机器人
1.本实用新型涉及机器人技术领域,具体涉及一种矿用救援机器人。
背景技术:
2.在现有技术条件下,煤矿事故发生后,矿井下的搜救工作主要还是以人工搜救为主,部分采用救援机器人救援,但由于矿井内部环境的未知性,极大的增加了救援时间,救援效率低。当矿井发生瓦斯爆炸、冲击低压等灾害事故后,巷道内部空间会变狭小、通过性条件会变差,且部分巷道区域可能会存在涉水或泥的情况,大大增加了救援难度,而普通的救援机器人无法快速达到人员被困地点,随着时间的推移,会影响被困人员搜救效率。此外,被困人员如果长时间没有食物补给,会增加事故伤亡后果。为此,有必要设计一种矿用救援设施来解决此类问题。
技术实现要素:
3.本实用新型的目的是为了克服现有技术的不足,提供了一种矿用救援机器人。
4.本实用新型通过以下技术方案实现:
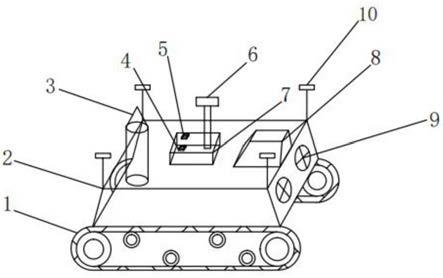
5.一种矿用救援机器人,其特征在于:包括履带1、机体2、信号传输器3、氧气浓度传感器4、瓦斯浓度传感器5、红外避障仪6、定位仪7、热成像仪8、探照灯9、螺旋桨10;所述机体2位于履带1上方,机体2为空腔结构,前端设有探照灯9;所述信号传输器3位于机体2上方,所述定位仪7位于机体2上方,所述热成像仪8位于机体2上方,所述螺旋桨10位于机体2上方四个角处,所述氧气浓度传感器4位于定位仪7上方,所述瓦斯浓度传感器5位于定位仪7上方,所述红外避障仪6位于定位仪7上方。
6.作为本实用新型的优选技术方案,所述探照灯9为两个led防爆探照灯,布置在机体2的前端。
7.作为本实用新型的优选技术方案,所述机体上方有信号传输器3,包含信息接收模块和信息发射模块,采用数字微波通信方式,信号传输距离3km
‑
8km;其用于处理来自地面控制端的信号,同时也能将机器人探测到的信息传输到地面控制端。
8.作为本实用新型的优选技术方案,所述定位仪7上方有红外避障仪6,包含红外信号发射二极管与接受二极管,红外发射二极管峰值波长为940nm;其用于探测出障碍物,进行辅助避障,当探测到前方有积水、淤泥或者塌陷等恶劣地形时,红外避障仪6可将报警信号通过信号传输器3传递到地面控制端,地面控制人员可操控机器人启动机体2上方四个角处配备的螺旋桨10,使机器人进行低高度、短距离的离地飞行,顺利通过障碍。
9.与现有的技术相比,本实用新型的有益效果是:本实用新型采用履带式设计,并有红外避障功能,同时,机体四个角上装配有四个机翼,可带动机器人进行离地飞行,以便于机器人在复杂,恶劣的矿井中高效进行搜寻。在机器人上配备有热成像仪及照明灯,便于观测事故周边环境和准确高效发现被困人员。机体为空腔结构,可放置部分食物、水以及必备药品,能使被困人员第一时间先展开自救,降低由于被困时间过长而造成的进一步伤害。本
机器人能够高效率的在矿井环境中准确探测到被困人员,加快救援人员的救援速度,提高救援效率和被困人员成功救援率。
附图说明
10.图1为本实用新型的结构示意图。
11.图中:1、履带;2、机体;3、信号传输器;4、氧气浓度传感器;5、瓦斯浓度传感器;6、红外避障仪;7、定位仪;8、热成像仪;9、探照灯;10、螺旋桨
具体实施方式
12.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
13.参阅图1,为本实用新型的结构示意图。
14.所述一种矿用救援机器人,包括履带1、机体2、信号传输器3、氧气浓度传感器4、瓦斯浓度传感器5、红外避障仪6、定位仪7、热成像仪8、探照灯9、螺旋桨10;所述机体2位于履带1上方,机体2为空腔结构;所述信号传输器3位于机体2上方,其包含信息接收模块和信息发射模块,采用数字微波通信方式,信号传输距离3km
‑
8km,将热成像信息、氧气浓度、瓦斯浓度等信息同步传输至地面控制端,同时接收来自地面控制端的控制信号;所述定位仪7位于机体2上方;所述热成像仪8位于机体2上方,能够根据热成像原理准确区辨识出被困人员;所述探照灯9为两个led防爆探照灯,均匀布置在机体2的前端;所述螺旋桨10位于机体2上方四个角处,所述氧气浓度传感器4位于定位仪7上方,所述瓦斯浓度传感器5位于定位仪7上方,所述红外避障仪6位于定位仪7上方,用于分辨障碍物,进行辅助避障,当探测到前方有积水或者塌陷等恶劣地形时,红外避障仪6可将报警信号通过信号传输器3传递到地面,地面控制人员可操控机器人启动机体2上方四个角处配备的螺旋桨10,使机器人进行低高度,短距离的离地飞行,顺利通过障碍。
15.现场使用时,救援人员将本救援机器人通过信号传输器进行与地面控制端连接,然后通过远程控制使机器人进入事故现场,展开对环境的探测,以及对被困人员的搜救,同时运送少量水、食物和药品,为后续救援争取宝贵时间。
16.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种矿用救援机器人,其特征在于:包括履带(1)、机体(2)、信号传输器(3)、氧气浓度传感器(4)、瓦斯浓度传感器(5)、红外避障仪(6)、定位仪(7)、热成像仪(8)、探照灯(9)和螺旋桨(10);所述机体(2)位于履带(1)上方,机体(2)为空腔结构;所述信号传输器(3)位于机体(2)上方;所述定位仪(7)位于机体(2)上方;所述氧气浓度传感器(4)位于定位仪(7)上方,所述瓦斯浓度传感器(5)位于定位仪(7)上方,所述红外避障仪(6)位于定位仪(7)上方,且红外避障仪(6)包含红外信号发射二极管与接受二极管,红外发射二极管峰值波长为940nm;所述热成像仪(8)位于机体(2)上方;所述探照灯(9)为两个led防爆探照灯,探照距离50m
‑
100m,布置在机体(2)的前端;所述螺旋桨(10)有四个,分别布置在机体(2)上方四个角处。2.根据权利要求1所述的一种矿用救援机器人,其特征在于:所述信号传输器(3)包含信息接收模块和信息发射模块,采用数字微波通信方式,信号传输距离3km
‑
8km。3.根据权利要求1所述的一种矿用救援机器人,其特征在于:所述螺旋桨(10)为二页螺旋桨,相邻的螺旋桨转向相反。
技术总结
本实用新型涉及一种矿用救援机器人,包括机体和用于驱动机体运动的履带,机体前方配备有照明灯,机体上方配备有热成像仪、定位仪、红外避障仪,以及瓦斯浓度传感器和氧气浓度传感器,同时,机体四个角上装配有四个螺旋桨。本机器人受矿井环境影响小,能够在矿井中高效准确地探测到被困人员,机体空腔中带有的少量水、食物或者药品,能让被困人员第一时间展开自救,增加救援人员的救援成功率。同时在机器人实施救援过程中,其传感器探测到的瓦斯和氧气浓度会实时显示、热成像仪画面可实时同步传输至地面控制端,为提高矿井灾害救援效率提供支持。持。持。
技术研发人员:陈云龙 肖长源 杨帆 李重情
受保护的技术使用者:安徽理工大学
技术研发日:2021.05.20
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1