可攀爬高空多角度铁质地形的可视多用途智能机器人的制作方法
1.本实用新型涉及环保技术领域,具体涉及可攀爬高空多角度铁质地形的可视多用途智能机器人。
背景技术:
2.机器人采用永磁可多角度越障履带以及可角度变化结构实现钢铁介质下高空负重攀爬,越障,多障碍角度攀爬实现高空及危险场所的高压清洗,油漆喷涂,检测等无人化工作,目前,由于攀爬机器人的重量大、无法实现无线供电以及制造成本高,造成机器人攀爬角度的调整灵活度不佳、越障能力速度缓慢,由于攀爬属于垂直面,容易造成侧翻,造成了机器人工作效率降低,撞击损坏。
技术实现要素:
3.针对上述现有技术存在的问题,本实用新型提供可攀爬高空多角度铁质地形的可视多用途智能机器人,以解决上述提到的技术问题。
4.为了实现上述目的,本实用新型通过以下技术方案实现:可攀爬高空多角度铁质地形的可视多用途智能机器人,包括用于储存使用的机器人机身、高压水旋转喷头、磁性履带和联动驱动机构,机器人机身的设置有高分子锂电池,具有有能量高、小型化、轻量化的特点,以及锂聚合物电池具有超薄化特征;高分子锂电池提供机器人机身和驱动电机电能使用,所述机器人机身一侧设置有电源接口和高压水接口、另一侧设置有高压水旋转喷头,所述机器人机身的底部设置有驱动电机,所述机器人机身的底部四角分别设置有磁性履带,所述磁性履带的内部啮合连接有联动驱动机构,所述驱动机构通过驱动电机驱动。
5.进一步的,所述联动驱动机构包括主驱动齿轮、辅助齿轮和联动齿轮,所述主驱动齿轮与驱动电机固定连接,所述主驱动齿轮相对的一侧均安装有支撑底座,所述支撑底座的两侧均安装有固定架,所述固定架远离支撑底座的一侧与辅助齿轮转动连接,位于同侧所述固定架之间的中部固定连接竖直板,所述竖直板之间通过转轴安装有联动齿轮,所述联动齿轮的两侧对应与主驱动齿轮、辅助齿轮啮合连接,通过驱动电机驱动主驱动齿轮,带动联动齿轮转动,进而带动辅助齿轮转动,通过主驱动齿轮、辅助齿轮啮合连接,进行驱动机器人前行。
6.进一步的,所述磁性履带的内部设置有链条,所述链条与主驱动齿轮、辅助齿轮啮合连接,以实现磁力履带行进的稳固功能。
7.进一步的,所述主驱动齿轮的中部设置有与驱动电机连接的齿轮转轴一,所述齿轮转轴一远离主驱动齿轮的一侧转动连接套接板,所述套接板的远离主驱动齿轮的一侧表面固定连接支撑底座,主驱动齿轮上的通过套接板固定连接支撑底座,实现支撑固定架的一侧,目的为了支撑联动齿轮的作用。
8.进一步的,所述辅助齿轮内部转轴的两侧均套接有密封轴承,所述密封轴承相对的两侧表面均固定连接固定架,实现支撑固定架的另一侧,目的为了支撑联动齿轮的作用。
9.进一步的,所述辅助齿轮内部转轴的两端均螺纹连接有限位密封轴承作用的限位帽。
10.综上,本实用新型提供可攀爬高空多角度铁质地形的可视多用途智能机器人,本机器人由4个带有强磁特殊履带轮,2个伺服电机驱动采用无线遥控控制设备,由于履带轮的自由度,可以实现上图示个角度攀爬,解决垂直面,凹面以及负角度位置的越障能力。从而实现高度复杂地形的到达。达到全方位全地形的高压清洗,喷涂,检测。
附图说明
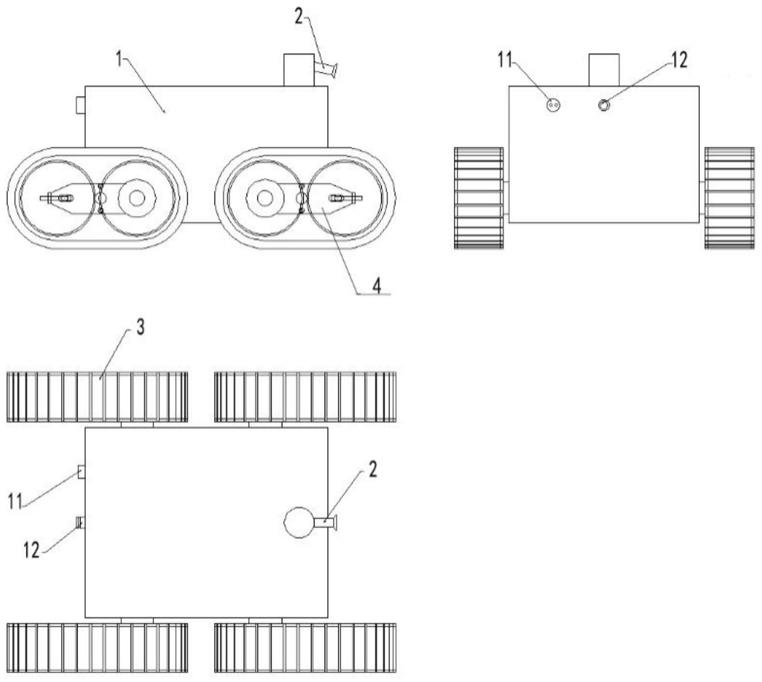
11.图1是本实用新型的结构示意图;
12.图2是图1中的结构示意图;
13.图3是图1中的结构示意图;
14.图中:机器人机身1、电源接口11、高压水接口12、高压水旋转喷头2、磁性履带3、链条31、联动驱动机构4、主驱动齿轮41、辅助齿轮42、联动齿轮43、支撑底座44、固定架45、竖直板46、齿轮转轴一47、套接板48、密封轴承51、限位帽52。
具体实施方式
15.下面结合附图对本实用新型做进一步说明。
16.如图1至图3所示,本实用新型提供可攀爬高空多角度铁质地形的可视多用途智能机器人,本机器人由4个带有强磁特殊履带轮,2个伺服电机驱动采用无线遥控控制设备,由于履带轮的自由度,可以实现上图示个角度攀爬,解决垂直面,凹面以及负角度位置的越障能力。从而实现高度复杂地形的到达。达到全方位全地形的高压清洗,喷涂,检测。
技术特征:
1.可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,包括用于储存使用的机器人机身(1)、高压水旋转喷头(2)、磁性履带(3)和联动驱动机构(4),所述机器人机身(1)一侧设置有电源接口(11)和高压水接口(12)、另一侧设置有高压水旋转喷头(2),所述机器人机身(1)的底部设置有驱动电机,所述机器人机身(1)的底部四角分别设置有磁性履带(3),所述磁性履带(3)的内部啮合连接有联动驱动机构(4),所述驱动机构(4)通过驱动电机驱动。2.根据权利要求1所述可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,所述联动驱动机构(4)包括主驱动齿轮(41)、辅助齿轮(42)和联动齿轮(43),所述主驱动齿轮(41)与驱动电机固定连接,所述主驱动齿轮(41)相对的一侧均安装有支撑底座(44),所述支撑底座(44)的两侧均安装有固定架(45),所述固定架(45)远离支撑底座(44)的一侧与辅助齿轮(42)转动连接,位于同侧所述固定架(45)之间的中部固定连接竖直板(46),所述竖直板(46)之间通过转轴安装有联动齿轮(43),所述联动齿轮(43)的两侧对应与主驱动齿轮(41)、辅助齿轮(42)啮合连接。3.根据权利要求2所述可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,所述磁性履带(3)的内部设置有链条(31),所述链条(31)与主驱动齿轮(41)、辅助齿轮(42)啮合连接。4.根据权利要求2所述可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,所述主驱动齿轮(41)的中部设置有与驱动电机连接的齿轮转轴一(47),所述齿轮转轴一(47)远离主驱动齿轮(41)的一侧转动连接套接板(48),所述套接板(48)的远离主驱动齿轮(41)的一侧表面固定连接支撑底座(44)。5.根据权利要求2所述可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,所述辅助齿轮(42)内部转轴的两侧均套接有密封轴承(51),所述密封轴承(51)相对的两侧表面均固定连接固定架(45)。6.根据权利要求2所述可攀爬高空多角度铁质地形的可视多用途智能机器人,其特征在于,所述辅助齿轮(42)内部转轴的两端均螺纹连接有限位密封轴承(51)作用的限位帽(52)。
技术总结
可攀爬高空多角度铁质地形的可视多用途智能机器人,包括用于储存使用的机器人机身、高压水旋转喷头、磁性履带和联动驱动机构,机器人机身的设置有高分子锂电池,具有有能量高、小型化、轻量化的特点,以及锂聚合物电池具有超薄化特征;高分子锂电池提供机器人机身和驱动电机电能使用,所述机器人机身一侧设置有电源接口和高压水接口、另一侧设置有高压水旋转喷头,所述机器人机身的底部设置有驱动电机,所述机器人机身的底部四角分别设置有磁性履带,所述磁性履带的内部啮合连接有联动驱动机构,所述驱动机构通过驱动电机驱动。所述驱动机构通过驱动电机驱动。所述驱动机构通过驱动电机驱动。
技术研发人员:周生伟
受保护的技术使用者:周生伟
技术研发日:2021.05.22
技术公布日:2022/2/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1