一种轻量化新型四足机器人
1.本实用新型属于机器人技术领域,具体是一种轻量化新型四足机器人。
背景技术:
2.机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,机器人可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率质量,服务人类生活,扩大延伸人的活动及能力范围;
3.而四足机器人是一种通过四个足进行行走的机器人;
4.然而现有的四足机器人结构较为简单,在进行行走时对周围环境的识别能力较差,且只能通过独立的控制装置进行控制。
技术实现要素:
5.本实用新型的目的在于克服现有技术的缺陷,提供一种轻量化新型四足机器人。
6.为实现上述目的,本实用新型采用了如下技术方案:
7.一种轻量化新型四足机器人,包括主体外壳和设置于四个安装在所述主体外壳下方的足组件,所述足组件包括大腿和小腿,所述大腿和小腿组件通过膝关节活动连接,所述主体外壳的两侧下方位于足组件处设置有舵机,所述大腿与所述舵机之间通过髋关节活动连接;
8.所述主体外壳的前端设置有摄像头,所述主体外壳的尾端设置有尾端控制板。
9.在一种可能的实现方式中,所述主体外壳内部安装有供电组件和主控制器,所述供电组件包括蓄电池和电源板块。
10.在一种可能的实现方式中,所述主体外壳内部下方还设置有传感器,所述传感器包括陀螺仪和蓝牙模块,通过陀螺仪能够感应和检测机器人的动态。
11.在一种可能的实现方式中,所述尾端控制板上设置有usb接口、xt60接口、dc接口和开关按钮。
12.在一种可能的实现方式中,所述主体外壳的顶部安装有手提带,方便进行手提。
13.在一种可能的实现方式中,所述主体外壳的侧面嵌设有激光测距仪。
14.本实用新型中,通过在主体外壳前方的摄像头,摄像头能够进行外部环境识别,通过与主控制器通信数据处理后,会调整姿态且切换相对应的步态,对角步态,walk步态,同步侧溜等步态,通过在主体外壳侧面设置激光测距仪,能够在机器人进行行走时检测障碍物,自主避障;
15.本实用新型中,主体外壳内部下方设置有传感器,传感器包括蓝牙模块,通过蓝牙模块能够连接手机等一切具有蓝牙功能的设备,进行远程蓝牙控制该机器人进行任意操作。
附图说明
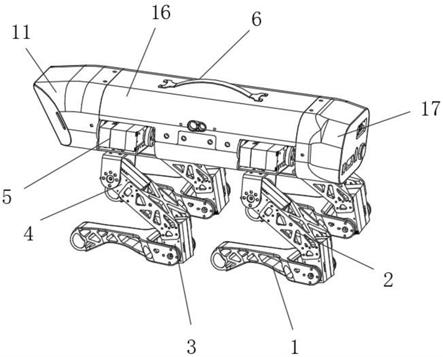
16.图1是本实用新型的整体结构示意图;
17.图2是本实用新型的内部结构示意图;
18.图3是本实用新型中结构示意图;
19.图4是本实用新型的控制流程框图。
20.附图标记:1、小腿;2、大腿;3、膝关节;4、髋关节;5、舵机;6、手提带;7、传感器;8、供电组件;9、主控制器;10、激光测距仪;11、摄像头;12、usb接口;13、xt60接口;14、dc接口;15、开关按钮;16、主体外壳;17、尾端控制板。
具体实施方式
21.以下结合附图1-4,进一步说明本实用新型一种轻量化新型四足机器人的具体实施方式。本实用新型一种轻量化新型四足机器人不限于以下实施例的描述。
22.实施例1:
23.本实施例给出一种轻量化新型四足机器人的具体结构,如图1所示,包括主体外壳16和设置于四个安装在主体外壳16下方的足组件,足组件包括大腿2和小腿1,大腿2和小腿1组件通过膝关节3活动连接,主体外壳16的两侧下方位于足组件处设置有舵机5,大腿2与舵机5之间通过髋关节4活动连接;
24.主体外壳16的前端设置有摄像头11,主体外壳16的尾端设置有尾端控制板17。
25.实施例2:
26.本实施例给出一种轻量化新型四足机器人的具体结构,如图1-3所示,包括主体外壳16和设置于四个安装在主体外壳16下方的足组件,足组件包括大腿2和小腿1,大腿2和小腿1组件通过膝关节3活动连接,主体外壳16的两侧下方位于足组件处设置有舵机5,大腿2与舵机5之间通过髋关节4活动连接;
27.主体外壳16的前端设置有摄像头11,主体外壳16的尾端设置有尾端控制板17。
28.主体外壳16内部安装有供电组件8和主控制器9,供电组件8包括蓄电池和电源板块。
29.实施例3:
30.本实施例给出一种轻量化新型四足机器人的具体结构,如图1-3所示,包括主体外壳16和设置于四个安装在主体外壳16下方的足组件,足组件包括大腿2和小腿1,大腿2和小腿1组件通过膝关节3活动连接,主体外壳16的两侧下方位于足组件处设置有舵机5,大腿2与舵机5之间通过髋关节4活动连接;
31.主体外壳16的前端设置有摄像头11,主体外壳16的尾端设置有尾端控制板17。
32.实施例4:
33.本实施例给出一种轻量化新型四足机器人的具体结构,如图1-3所示,包括主体外壳16和设置于四个安装在主体外壳16下方的足组件,足组件包括大腿2和小腿1,大腿2和小腿1组件通过膝关节3活动连接,主体外壳16的两侧下方位于足组件处设置有舵机5,大腿2与舵机5之间通过髋关节4活动连接;
34.主体外壳16的前端设置有摄像头11,主体外壳16的尾端设置有尾端控制板17。
35.主体外壳16内部下方还设置有传感器7,传感器7包括陀螺仪和蓝牙模块。
36.尾端控制板17上设置有usb接口12、xt60接口13、dc接口14和开关按钮15,开关按钮15采用三档按钮开关。
37.主体外壳16的顶部安装有手提带6。
38.主体外壳16的侧面嵌设有激光测距仪10。
39.工作原理:参照图1-4,该四足机器人有自主和蓝牙遥控两种模式,由一个三档按钮开关进行切换,该四足机器人开始运行时,主体外壳16前方的摄像头11进行外部环境识别,通过与主控制器9通信数据处理后,会调整姿态且切换相对应的步态,对角步态,walk步态,同步侧溜等步态,激光测距仪10也会同时检测障碍物,自主避障,若切换到蓝牙模式,在设置按键字符命令后,可通过手机等一切可用蓝牙功能的设备进行任意操作,该四足机器人制作成本较低,满足大多数爱好者的资金要求和兴趣要求,可以大量生产以供研究四足机器人姿态及步态算法等基础知识,加快四足机器人的发展。
40.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
技术特征:
1.一种轻量化新型四足机器人,包括主体外壳(16)和设置于四个安装在所述主体外壳(16)下方的足组件,其特征在于:所述足组件包括大腿(2)和小腿(1),所述大腿(2)和小腿(1)组件通过膝关节(3)活动连接,所述主体外壳(16)的两侧下方位于足组件处设置有舵机(5),所述大腿(2)与所述舵机(5)之间通过髋关节(4)活动连接;所述主体外壳(16)的前端设置有摄像头(11),所述主体外壳(16)的尾端设置有尾端控制板(17)。2.如权利要求1所述的一种轻量化新型四足机器人,其特征在于:所述主体外壳(16)内部安装有供电组件(8)和主控制器(9),所述供电组件(8)包括蓄电池和电源板块。3.如权利要求1所述的一种轻量化新型四足机器人,其特征在于:所述主体外壳(16)内部下方还设置有传感器(7),所述传感器(7)包括陀螺仪和蓝牙模块。4.如权利要求1所述的一种轻量化新型四足机器人,其特征在于:所述尾端控制板(17)上设置有usb接口(12)、xt60接口(13)、dc接口(14)和开关按钮(15)。5.如权利要求1所述的一种轻量化新型四足机器人,其特征在于:所述主体外壳(16)的顶部安装有手提带(6)。6.如权利要求1所述的一种轻量化新型四足机器人,其特征在于:所述主体外壳(16)的侧面嵌设有激光测距仪(10)。
技术总结
本实用新型公开了一种轻量化新型四足机器人,包括主体外壳和设置于四个安装在主体外壳下方的足组件,足组件包括大腿和小腿,大腿和小腿组件通过膝关节活动连接,主体外壳的两侧下方位于足组件处设置有舵机,大腿与舵机之间通过髋关节活动连接;主体外壳的前端设置有摄像头,主体外壳的尾端设置有尾端控制板,本实用新型适用于四足机器人,该机器人通过在主体外壳前方的摄像头,摄像头能够进行外部环境识别,通过与主控制器通信数据处理后,会调整姿态且切换相对应的步态,对角步态,walk步态,同步侧溜等步态,通过在主体外壳侧面设置激光测距仪,能够在机器人进行行走时检测障碍物,自主避障。自主避障。自主避障。
技术研发人员:张晓娟 裴乐松 郭昭 何满塘 原野
受保护的技术使用者:太原工业学院
技术研发日:2021.10.25
技术公布日:2022/3/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1